合成孔径雷达专题
合成孔径雷达干涉测量InSAR数据处理、地形三维重建、形变信息提取、监测等实践技术应用
合成孔径雷达干涉测量(Interferometric Synthetic Aperture Radar, InSAR)技术作为一种新兴的主动式微波遥感技术,凭借其可以穿过大气层,全天时、全天候获取监测目标的形变信息等特性,已在地表形变监测、DEM生成、滑坡、火山活动、冰川运动、人工建筑物形变信息提取等多种领域展开了成功应用。InSAR作为一种新兴的空间大地测量技术,克服了传统大地测量技术需要人工野
SAR成像系列:【14】全息合成孔径雷达(全息SAR,Holographic SAR, Holo-SAR)
目前发展的全息成像技术包括:光学全息、红外全息、微波全息和超声全息技术,这些全息技术在军事侦察和监视上有重要意义。由于可见光在大气或水中传播时衰减很快,导致光学全息成像设备在不良的气候下无法进行工作,而微波全息技术则完全不受这些条件的影响。这为实现SAR全息成像带来无以伦比的优势和广阔的应用前景。SAR成像技术经过多年的发展,结合多基线理论,直到2016年,SAR微波全息概念及机载S
《合成孔径雷达成像算法与实现》Figure6.18
% rho_r = c/(2*Fr)而不是rho_r = c/(2*Bw)% Hsrcf exp函数里忘记乘pi了clcclearclose all参数设置距离向参数设置R_eta_c = 20e3; % 景中心斜距Tr = 2.5e-6; % 发射脉冲时宽Kr = 20e12; % 距离向调

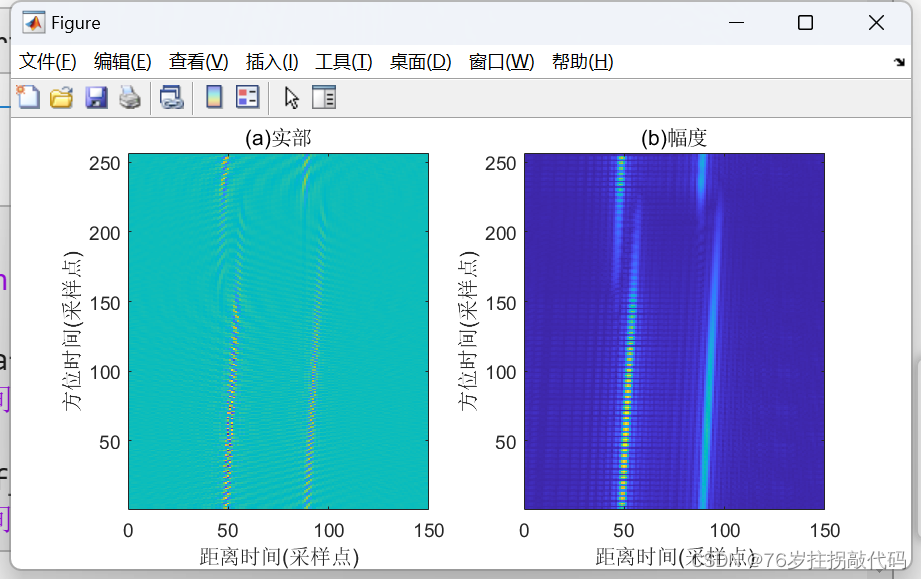
《合成孔径雷达成像算法与实现》Figure6.17
% rho_r = c/(2*Fr)而不是rho_r = c/(2*Bw)% Hsrcf exp函数里忘记乘pi了clcclearclose all参数设置距离向参数设置R_eta_c = 20e3; % 景中心斜距Tr = 2.5e-6; % 发射脉冲时宽Kr = 20e12; % 距离向调
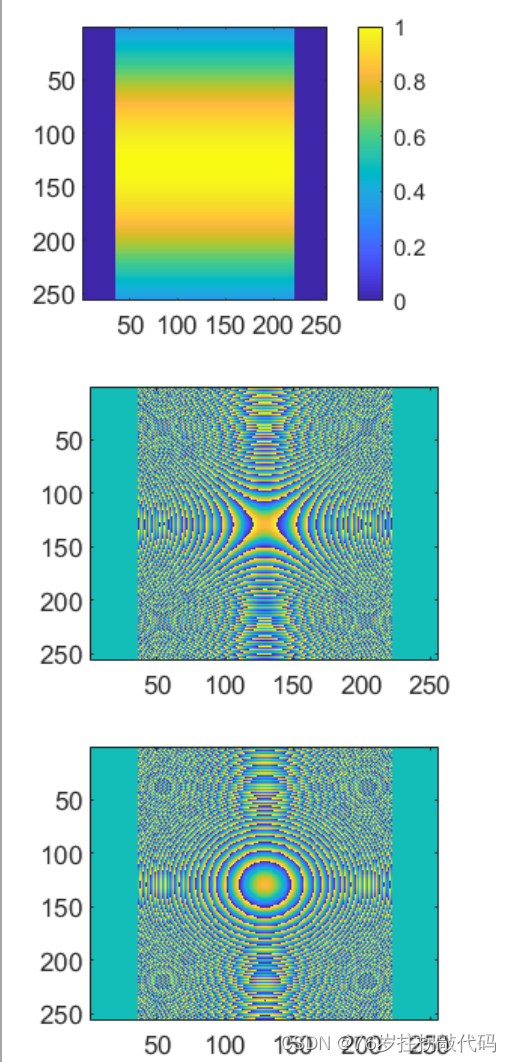
《合成孔径雷达成像算法与实现》Figure6.12
clcclearclose all参数设置距离向参数设置R_eta_c = 20e3; % 景中心斜距Tr = 2.5e-6; % 发射脉冲时宽Kr = 20e12; % 距离向调频率alpha_os_r = 1.7; % 距离过采样率Nrg = 320;
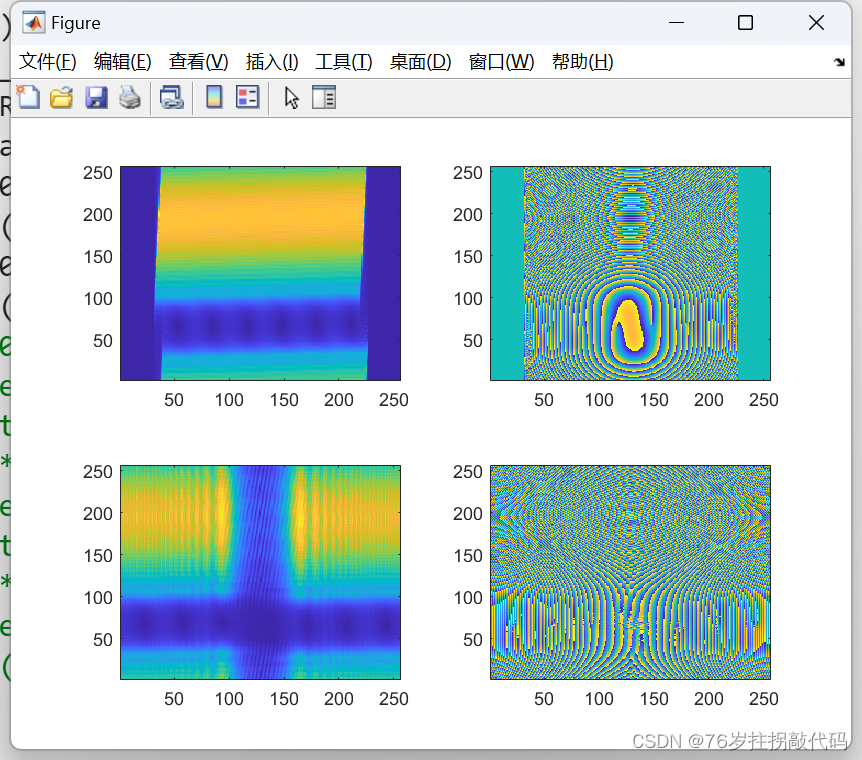
《合成孔径雷达成像算法与实现》Figure6.16
clcclearclose all参数设置距离向参数设置R_eta_c = 20e3; % 景中心斜距Tr = 2.5e-6; % 发射脉冲时宽Kr = 20e12; % 距离向调频率alpha_os_r = 1.2; % 距离过采样率Nrg = 320;
《合成孔径雷达成像算法与实现》Figure6.5
clcclearclose all参数设置距离向参数设置R_eta_c = 20e3; % 景中心斜距Tr = 2.5e-6; % 发射脉冲时宽Kr = 20e12; % 距离向调频率alpha_os_r = 1.2; % 距离过采样率Nrg = 320;

《合成孔径雷达成像算法与实现》Figure6.4
clcclearclose all参数设置距离向参数设置R_eta_c = 20e3; % 景中心斜距Tr = 2.5e-6; % 发射脉冲时宽Kr = 20e12; % 距离向调频率alpha_os_r = 1.2; % 距离过采样率Nrg = 320;
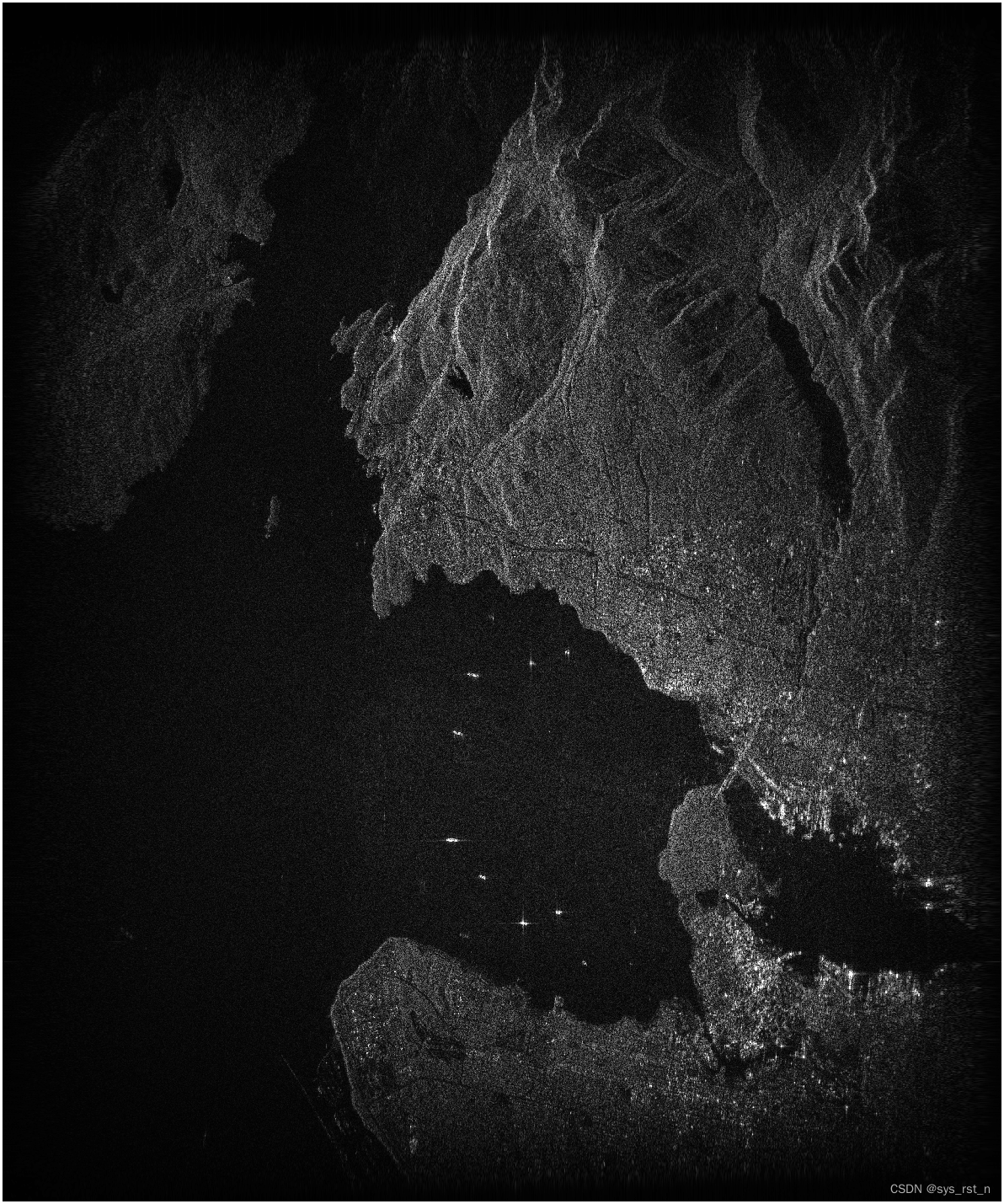
【SAR成像】基于RD、CS和ωk算法的合成孔径雷达成像算法原理与实现
基于RD、CS和ωk算法的合成孔径雷达成像算法实现 前言SAR基本概念雷达获取数据的几何关系低斜视角下的回波信号模型 RADARSAT-1主要参数数据预处理数据读取与再封装数据补零 成像算法坐标轴的产生RD算法距离压缩距离徙动矫正方位压缩 CS算法第一次相位相乘 变标后的信号第二次相位相乘第三次相位相乘 ωk算法参考函数相乘Stolt插值 成像后处理图像平移与翻转图像增强亮度钳制直方图均衡

《合成孔径雷达成像算法与实现》Figure5.18
clcclearclose all距离向参数R_eta_c = 20e3; % 景中心斜距Tr = 25e-6; % 发射脉冲时宽Kr = 0.25e12; % 距离向调频率Fr = 7.5e6; % 距离向采样率Nrg = 256;
《合成孔径雷达成像算法与实现》Figure5.16
clcclearclose all距离向参数R_eta_c = 20e3; % 景中心斜距Tr = 25e-6; % 发射脉冲时宽Kr = 0.25e12; % 距离向调频率Fr = 7.5e6; % 距离向采样率Nrg = 256;
《合成孔径雷达成像算法与实现》Figure5.19
clcclearclose all距离向参数R_eta_c = 20e3; % 景中心斜距Tr = 25e-6; % 发射脉冲时宽Kr = 0.25e12; % 距离向调频率Fr = 7.5e6; % 距离向采样率Nrg = 256;

《合成孔径雷达成像算法与实现》Figure5.17
clcclearclose all距离向参数R_eta_c = 20e3; % 景中心斜距Tr = 25e-6; % 发射脉冲时宽Kr = 0.25e12; % 距离向调频率Fr = 7.5e6; % 距离向采样率Nrg = 256;

自制合成孔径雷达(4) range代码解读
我一开头看不懂range代码,不知道为啥range代码看着跟之前的多普勒测速代码差不多,好像也在求ifft,也就是在算频率差。为啥频率差就能测出距离了?之前不是测的是速度么。 后来我就先找了XX2206的资料,因为PPT上写着要测量时的结果要跟XX2206的一个输出做对比的,这个输出引脚是一个类似方波一样的信号。 XX2206信号发生器: 这是对应开发板:http://www.saxmc

自制合成孔径雷达(2) SDR实现的对比(SDR实现测速雷达)
我今天查了查资料: 技术干货:用LimeSDR Mini制作一台软件定义多普勒雷达_搜狐汽车_搜狐网 查阅一些文献后,笔者想探寻减少雷达系统所需的昂贵模拟前端部件数量的可能性。设计灵感来自于Gregory L.Charvat的咖啡罐雷达。这是一个了不起的雷达,可以做许多有趣的事情,如FMCW和SAR成像。它们唯一的问题是前端所需的Mini-Circuits生产的模拟器件。本身是挺不错的,但是

自制合成孔径雷达(1) 后处理程序在Octave下运行
我最近看到一个麻省理工学院的开放课程,用一些简易电路来实现一个雷达,可以测距、测速也可以做合成孔径雷达。硬件电路用adc+单片机+usb转接实现,然后传输给电脑,电脑上c#程序做实时处理。但是这个教程资料还不是很完善,我没找到单片机和c#代码。然后我上MIT opencourseware网站上找到了老版本的资料。 链接: https://pan.baidu.com/s/1bvSZxAIw3A-7

自制合成孔径雷达(9) 声卡实现测距的另一种方法(FMCW)
FMCW雷达或者声呐,其实都是用chirp信号作为信号源,比较接收和发射的频率差,找出对应的时间差,算出距离的。MIT的雷达,除了测速部分在用单音外,都是在用这种信号(包括测距和SAR)。因此,做完上一篇文章的互相关测距,我感觉还不太够,还是得用chirp信号的方法来测距,这样才更符合将来要实现的合成孔径雷达/声呐。 其实这套东西,我之前就找到资料了,就是balint seeber做的演讲提到的

自制合成孔径雷达(7) 声卡实现测速声呐
用SDR有时候搭建起来比较麻烦,而且无线电波传播速度太快,造成同样时间对应的距离很大,分辨率比较低,因此接下来想用声波来研究这些理论,只需要电脑内建声卡就能玩,精度还比无线电波高,只是可能距离上没法做到无线电那么远。 视频: gnuradio实现测速声呐_哔哩哔哩_bilibili 这是我用的流图,原理和SDR的测速差不多,也是靠多普勒频移实现的,只不过声卡信号都是实

自制合成孔径雷达(6) SDR实现测距雷达
链接: https://pan.baidu.com/s/1rjLafiTZCmB_bF6gVIOQsA 提取码: skia 这个项目停滞了挺长一段时间,因为LimeSDR带宽不足,无法发出足够带宽的chirp信号,因此无法仿照MIT雷达教程实现测距雷达和SAR雷达,只能实现多普勒测速雷达。 我找到一篇论文,作者跟我一样也是看到了MIT雷达教程和多普勒雷达的SDR实现,并想出了一种新方法,实现了
InSAR数据处理、地形三维重建、形变信息提取、监测丨GMTSAR合成孔径雷达干涉测量丨GNSS、北斗高精度数据处理
目录 ①合成孔径雷达干涉测量InSAR数据处理、地形三维重建、形变信息提取、监测等应用 ②基于GMTSAR合成孔径雷达干涉测量InSAR数据处理、形变信息提取与分析 ③GNSS、北斗高精度数据处理暨新版GAMITGLOBK软件应用 更多应用 ①合成孔径雷达干涉测量InSAR数据处理、地形三维重建、形变信息提取、监测等应用 合成孔径雷达干涉测量(Interferometric Syn
《合成孔径雷达成像算法与实现》Figure5.12
clcclearclose all%% 距离向参数R_eta_c = 850e+3; % 景中心斜距%% 方位向参数V_r = 7100; %
【特征选择_论文阅读_毕业论文】02_王贤圆_电科_极化合成孔径雷达图像特征表示与目标分类方法研究_2021
主要工作:用图像形态学操作提取空间特征,利用核函数融合特征(以及多尺度特征),用深度神经网络进行特征提取,自适应给出锚点图的锚点数(用于半监督分类) 文章目录 摘要一、绪论1.1研究工作的背景和意义1.2国内外研究现状及存在问题1.2.1 特征表示1.2.2目标分类研究现状1.2.3存在问题 二、基于复合核函数的极化-空间特征融合方法2.1引言2.2极化SAR图像数据描述方法2.
合成孔径雷达干涉测量InSAR数据处理、形变信息提取与分析技术
合成孔径雷达干涉测量(Interferometric Synthetic Aperture Radar, InSAR)技术作为一种新兴的主动式微波遥感技术,凭借其可以穿过大气层,全天时、全天候获取监测目标的形变信息等特性,已在地表形变监测、DEM生成、滑坡、火山活动、冰川运动、人工建筑物形变信息提取等多种领域展开了成功应用。InSAR作为一种新兴的空间大地测量技术,克服了传统大地测量技术需要人工野