poisson专题
《R语言与农业数据统计分析及建模》学习——logistic回归和poisson回归
普通线性回归通常用来描述变量y与x之间的线性关系: 普通线性模型的假设是:响应变量y是连续型变量而且,服从正态分布分布。但在很多现实情况y并不是正态分布,如:二值问题/多分类问题,计次问题等,这些问题都是广义线性回归的范畴。广义线性回归用于解决因变量不是正态分布的问题。不同的广义线性回归类型,使用不同的连接函数,如下: 一、Logistic回归

从点云到网格(三)Poisson重建
Possion重建是Kazhdan等2006年提出的网格重建方法[1]。Possion重建的输入是点云及其法向量,输出是三维网格。Poisson有公开的源代码[2]。PCL中也有Poisson的实现。 核心思想 Possion重建是一个非常直观的方法。它的核心思想是点云代表了物体表面的位置,其法向量代表了内外的方向。通过隐式地拟合一个由物体派生的指示函数,可以给出一个平滑的物体表面的估计。
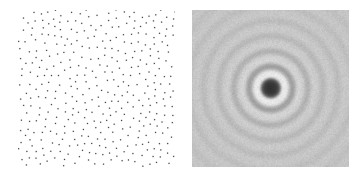
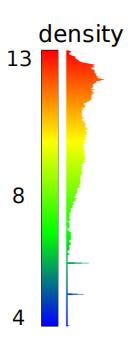
Fast Poisson Disk Sampling in Arbitrary Dimensions
转自:https://www.jasondavies.com/poisson-disc/ http://www.cs.ubc.ca/~rbridson/docs/bridson-siggraph07-poissondisk.pdf Robert Bridson University of British Columbia Abstract In many applications in g
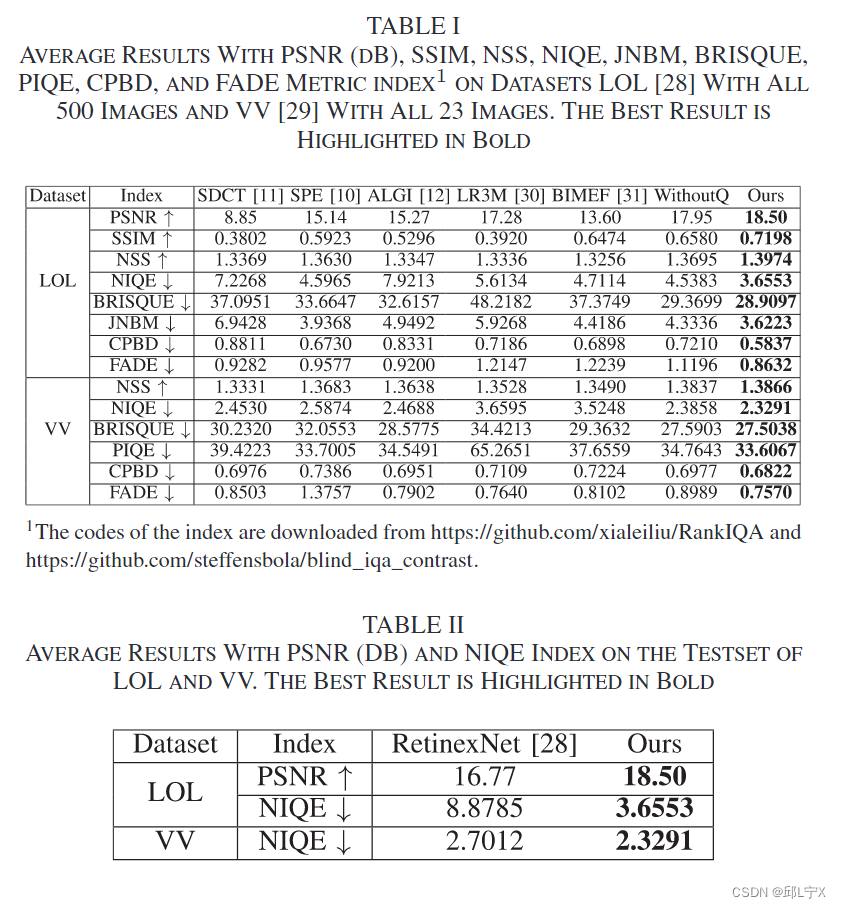
Quaternion Screened Poisson Equation for Low-Light Image Enhancement——论文笔记
摘要: 图像增强是一种增强低照度图片照度的方法,它能在增强的同时保持图像的真实度和自然度。对于彩色图像,大多数方法采用分开处理不同彩色通道的方式,但这样会忽略掉不同彩色通道间的联系。因此,本文采用基于四元数(Quaternion)的模型去保留颜色相关性,它可以通过四元数将某一像素的颜色信息整合起来。此外,我们提出了基于伽马校正函数(Gamma-correction functio
《论文阅读》Poisson Surface Reconstruction for LiDAR Odometry and Mapping
留个笔记自用 Poisson Surface Reconstruction for LiDAR Odometry and Mapping 做什么 Lidar Odometry激光雷达里程计,里程计作为移动机器人相对定位的有效传感器,为机器人提供了实时的位姿信息。移动机器人里程计模型决定于移动机器人结构和运动方式,即移动机器人运动学模型。 简单来说,里程计是一种利用从移动传感器获得的数据来估计
lidar poisson构网
lidar poisson构网 计算站点法向 先点default,再勾选Flip normals wrt viewpoint 对齐合并点云 第四个必勾选 Poisson构建 PoissonRecon --in eagle.points.ply --out eagle.screened.color.ply --depth 10 --density SurfaceTrimmer --i

三维建模之泊松重建 Poisson Surface Reconstruction
1. 参考 论文链接: http://sites.fas.harvard.edu/~cs277/papers/poissonrecon.pdf 源码链接: https://github.com/mkazhdan/PoissonRecon.git 资源网站链接: http://www.cs.jhu.edu/~misha/Code/PoissonRecon/Version8.0/ 2. 测试 (u

Jmeter定时器之泊松随机定时器Poisson Random Timer
原文:https://www.cnblogs.com/imyalost/p/6004678.html 这个定时器在每个线程请求之前按随机的时间停顿,大部分的时间间隔出现在一个特定的值,总的延迟就是泊松分布值和偏移值之和。 上面表示暂停时间会分布在100到400毫秒之间: (1)Lambda(in milliseconds):兰布达值 (2)Constant Delay Offset

【论文阅读】Iterative Poisson Surface Reconstruction (iPSR) for Unoriented Points
文章目录 声明作者列表核心思想归纳算法流程机器翻译 声明 本帖更新中如有问题,望批评指正!如果有人觉得帖子质量差,希望在评论中给出建议,谢谢! 作者列表 FEI HOU(侯飞)、CHIYU WANG、WENCHENG WANG:中国科学院大学 HONG QIN CHEN QIAN、YING HE 核心思想归纳 当一条从实体 M M M 内部发出并与等值面 F F F

C#,数值计算——泊松偏差(Poisson Deviance,Poissondev)的计算方法与源程序
1 文本格式 using System; namespace Legalsoft.Truffer { public class Poissondev : Ran { private double lambda { get; set; } private double sqlam { get; set; } private do

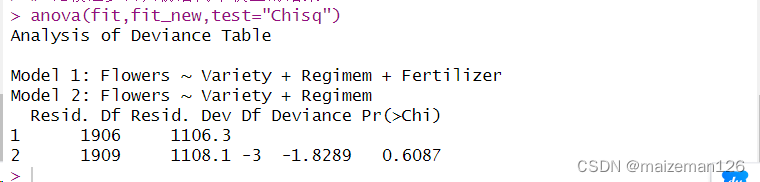
数据分享|R语言零膨胀泊松回归ZERO-INFLATED POISSON(ZIP)模型分析露营钓鱼数据实例估计IRR和OR...
全文链接:http://tecdat.cn/?p=26915 零膨胀泊松回归用于对超过零计数的计数数据进行建模。此外,理论表明,多余的零点是通过与计数值不同的过程生成的,并且可以独立地对多余的零点进行建模。因此,zip模型有两个部分,泊松计数模型和用于预测多余零点的 logit 模型。 相关视频 零膨胀泊松回归示例 示例 。野生动物生物学家想要模拟公园的渔民捕获了多少鱼。游客会被问到他们逗留了