本文主要是介绍远距离激光雷达,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
远距离激光雷达
转载:https://baijiahao.baidu.com/s?id=1572548815114800&wfr=spider&for=pc

目前的汽车LiDAR(激光雷达)通过利用近红外波段的905nm半导体激光器发射激光脉冲,然后记录反射光来创建汽车周围环境的点云图。可是,美国及其它国家的激光安全法规限制了激光脉冲的功率,导致LiDAR的探测范围限制在了30~40米左右,这对于一辆高速行驶的汽车来说,安全的制动距离太短了。自动驾驶汽车制造商需要定位至少200米范围内的低反射物体,以留给汽车充足的时间来识别威胁并采取制动,因此,它们开始转而寻求其它技术来补强。不过,市场上至少还有一家LiDAR制造商,仍在不断探索前行。
据麦姆斯咨询此前报道,17年春季,美国初创企业Luminar Technology发布了一款利用1550nm波长激光器实现200米探测距离的LiDAR。上周,Luminar将其LiDAR系统装配在一辆标准的奔驰车上,并在德国慕尼黑的激光世界光电子展上进行了展示。

Luminar的LiDAR系统包含一个激光器、一个传感器和一款活动光学组件其成功的关键在于宽松的安全法规,使Luminar能够在传统汽车中利用1550nm激光器获得了40倍于905nm激光器的激光脉冲强度。超强的功率使这款长波LiDAR的探测范围扩大了10倍,分辨率提高了50倍。扩大的探测范围对于一辆高速行驶的汽车来说意义巨大,因为一辆以75英里时速行驶的汽车,其一秒钟的移动距离高达34米。激光器安全法规的不同,源自这两个波长激光所带来的危害差异。人体最容易受到激光束危害的部位,是人眼后方的视网膜。仅仅是盯着太阳看,便能损害脆弱的视网膜,这就是我们的眼睛为什么在直面阳光时会不自觉的进行回避。由于激光是经过准直的窄光束,因此其危害更大,因为人眼会将平行激光束汇聚成一个小点投射到视网膜上,这就是为什么安全法规将激光指示光束的功率限制为5毫瓦。视网膜对目前汽车LiDAR采用的905nm红外激光没有响应,因此我们看不到LiDAR发出的激光。但是人眼会将905nm的红外激光传递到视网膜上,因此它会遭到和可见光一样的法规限制。事实上,这会带来更大的危害,因为我们的眼睛无法对视网膜没有响应的光源进行本能的回避。
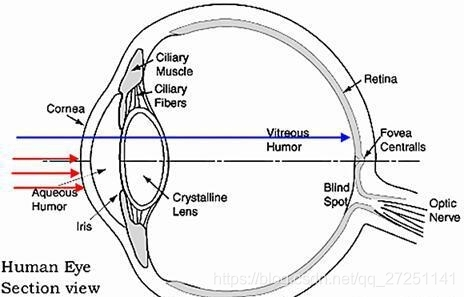
人眼内部对于905nm波长的光相当于是透明的(蓝色箭头);因此,采用905nm波长的LiDAR可以直射脆弱的视网膜。但是,人眼对于1550nm波长的光则是不透明的(红色箭头),因此,该波长的光无法投射到视网膜上,从而可以采用更高功率的LiDAR而不会对人眼造成伤害人眼内部的晶状体、眼角膜以及眼球内的液体,对于波长更大的光的透明度会变得更低,这主要是由于眼球内液体的吸收。基本上波长大于1400nm的光都无法投射到视网膜上,因此,激光器安全标准允许更大波长的高功率输出。尽管长波长激光会损害眼角膜,但是仅在强度高于视网膜损害阈值几个数量级的情况下才会发生。

警用LiDAR测速枪
警用LiDAR枪采用905nm激光器是因为它们不需要长距离探测,这种波长的激光器更经济,而且还可以采用价格便宜的硅探测器。但是,非汽车LiDAR开发者认为1550nm波长是LiDAR最优的波长,美国南佛罗里达大学已退休著名教授、LiDAR先驱Dennis Killinger称。那些是户外应用的LiDAR,因此采用一款人眼安全的波长,可以实现长距离探测,而无需担心对周围人群的眼睛造成伤害。1550nm激光器广泛应用于通讯等领域,例如美国马萨诸塞州的SemiNex公司便提供该波长的激光器。硅传感器对1550nm波长的激光没有响应,但是室温InGaAs传感器可以,而且InGaAs传感器也是标准的通讯产品。
Velodyne固态LiDAR传感器
Velarray1550nm波长的激光器和传感器的成本确实要比905nm波长的高,但是Killinger说,如今10000美元左右的汽车LiDAR系统的主要成本在于复杂的光机械扫描器,它每秒围绕激光器和传感器旋转多次。大幅降低LiDAR价格最有希望的方案是去掉目前采用的成本高昂的光机械扫描器,而采用光学版本的相控阵天线。相控阵天线常应用于雷达和手机中,它们包含并排布置的缝隙天线元件,通过电子信号引导而非运动部件进行聚焦。“目前有许多团队正在研究平面固态面板的小型开槽相控阵光学阵列,”Killinger说。去年,MIT(麻省理工学院)的光子系统组和DARPA(美国国防部高级研究计划局)介绍了一款在300mm芯片上打造的固态LiDAR,据称可以通过规模量产将产品价格控制在10美元。今年,也已经有几家公司宣布即将量产固态LiDAR,价格都将控制在100美元左右,例如:Velodyne在今年4月发布了其新款固定激光器固态LiDAR传感器Velarray;Quanergy在今年初宣布将在2017年量产其首款经济型固态激光雷达Quanergy S3;Cepton也在今年5月推出了HR80T远距离和HR80W广角激光雷达(LiDAR)产品,采用了其独有的微动(micro-motion)技术,摒弃了大型的光机械旋转部件。

Luminar的LiDAR安装在测试车辆车顶的前视图
Luminar则寄希望于不同的方案,它们将指向不同方向的LiDAR装配在汽车上。每个LiDAR仅包含一个激光器和接收器,并将定制的反射镜移入密封的壳体中。不过,他们并不急于将LiDAR的价格迅速降低到100美元区间,Luminar创始人兼首席执行官Austin Russell称,对于自动驾驶汽车来说,最重要的不是成本,而是性能。
这篇关于远距离激光雷达的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!