本文主要是介绍120°AGV|RGV小车激光障碍物传感器|避障雷达DE系列安装与连线方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
120°AGV|RGV小车激光障碍物传感器|避障雷达DE系列包含DE-4211、DE-4611、DE-4311、DE-4511等型号,根据激光飞行时间(TOF)测量原理运行的,利用激光光束对周围进行 120° 半径 4m(90%反射率)扫描,获得环境轮廓图形,通过软件配置建立保护区域范围,一 旦有物体处于设定的区域内,传感器对应的输出端口输出信号,上位机获取信号后做 出进一步的判断和处理。传感器可通过 4 线扫描最大角度 12°,相邻扫描线间隔角度: 4°,线程通道可通过软件配置。
本文重点介绍120°AGV|RGV小车激光障碍物传感器|避障雷达DE系列安装与连线方法。

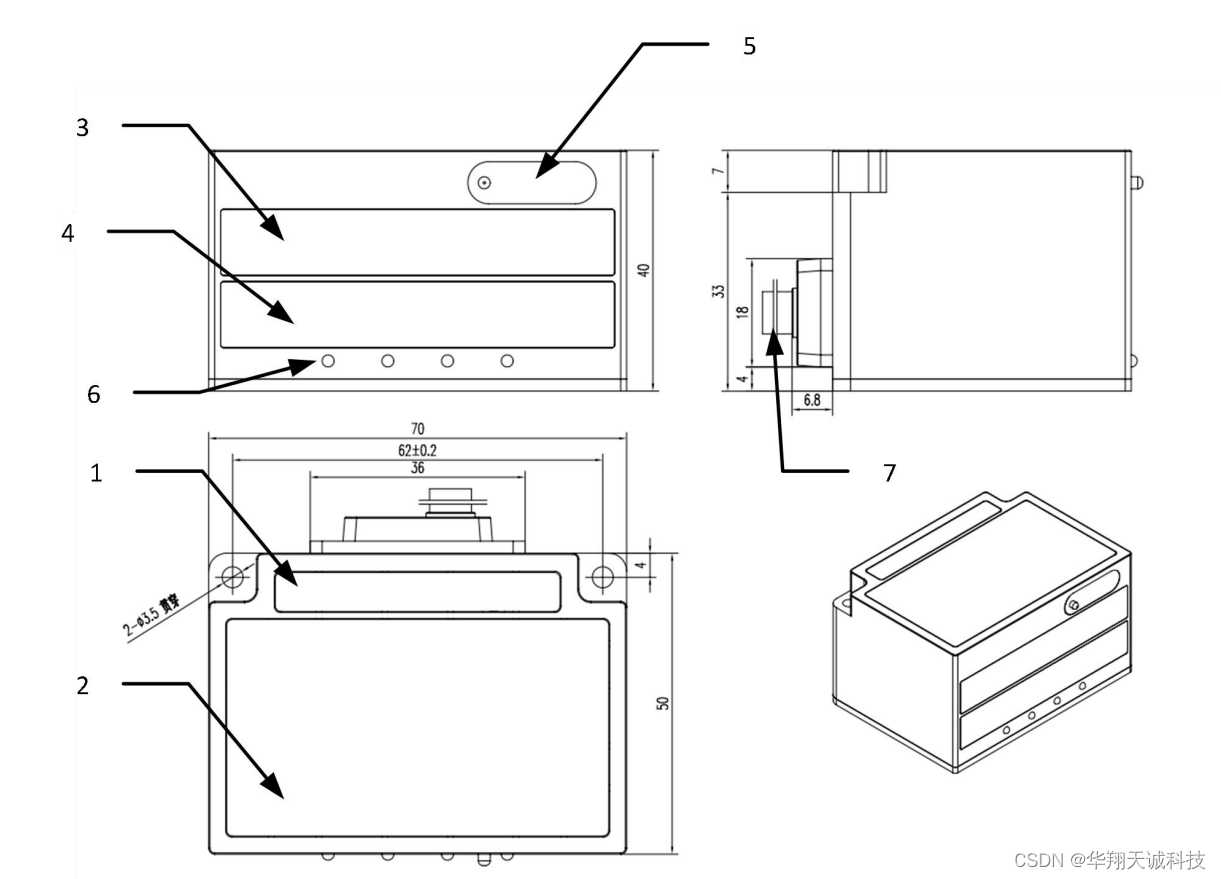
1、激光障碍物传感器|避障雷达DE系列尺寸图

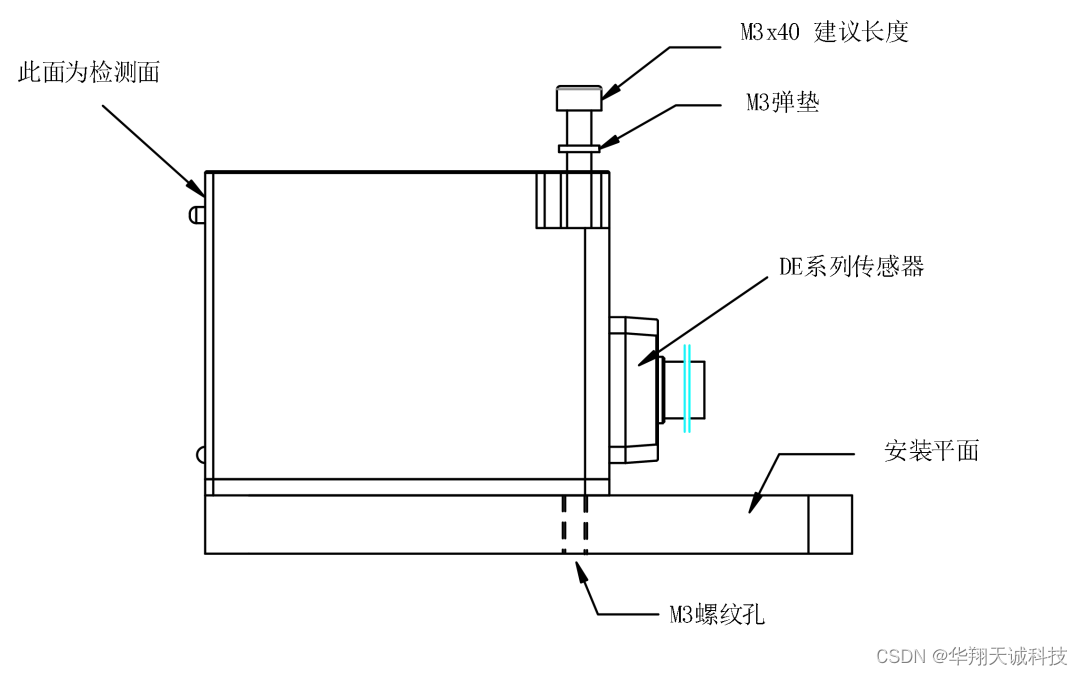
2、激光障碍物传感器|避障雷达DE系列安装要求
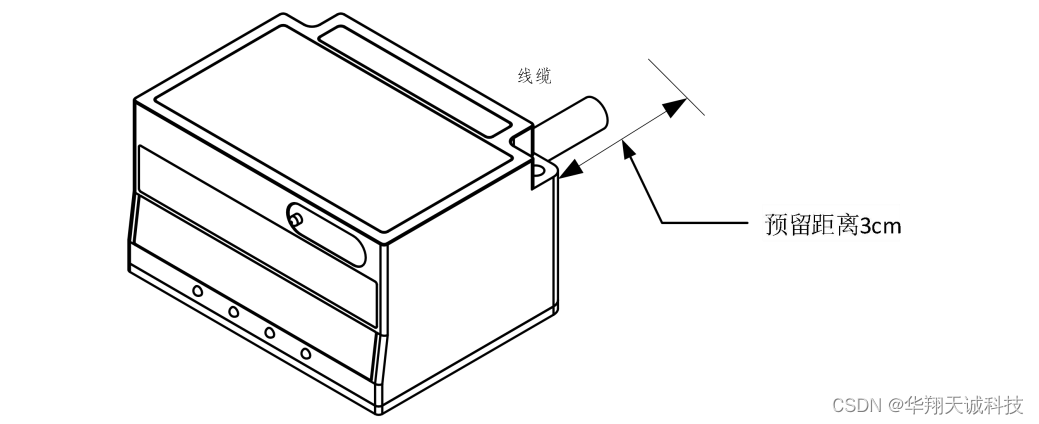
激光障碍物传感器自带电缆,电缆位置需要预留出线位置,避免电缆过度折弯。

1)水平安装时应注意传感器上下两面无障碍物遮挡。
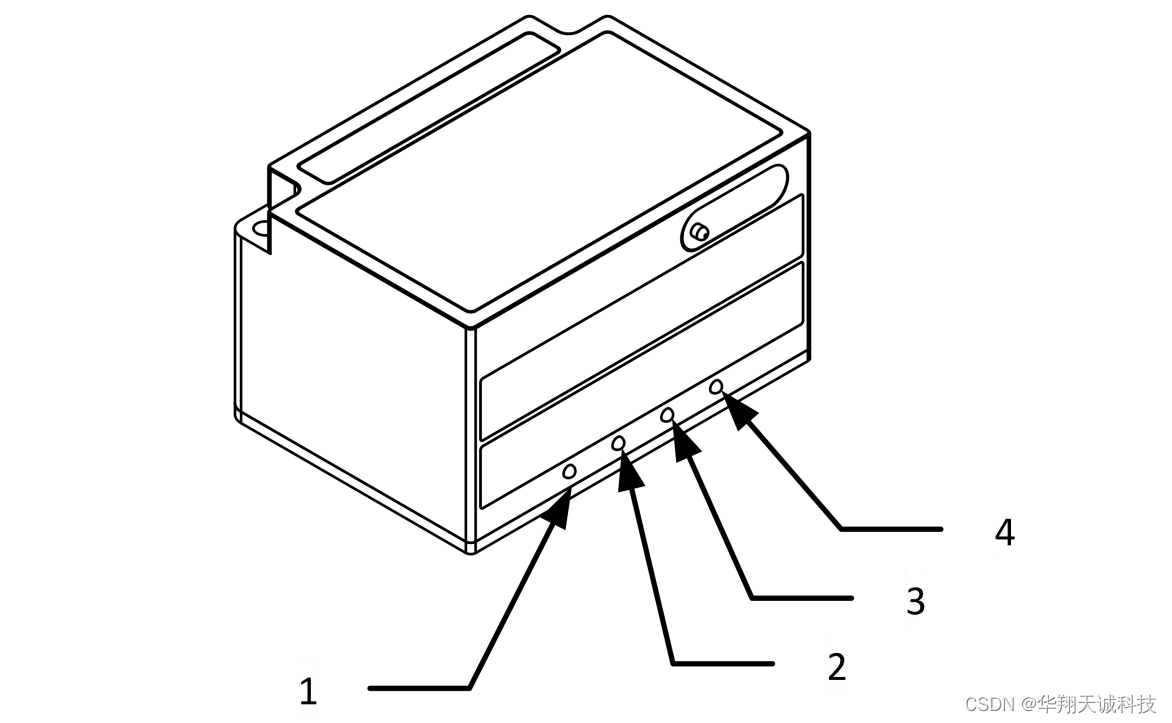
2)激光障碍物传感器底座前方应该留出指示灯观察窗口和配置端口,方便观察传感器状态和配置。 固定位置
3、激光障碍物传感器|避障雷达DE系列连线说明
3.1、激光障碍物传感器|避障雷达DE系列线序定义
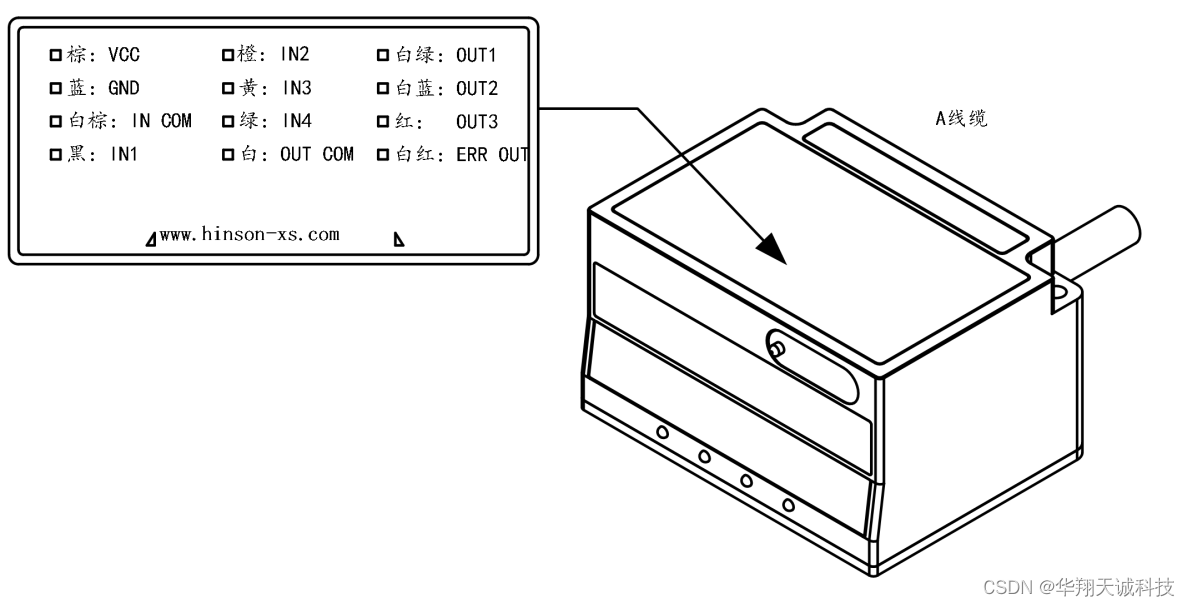
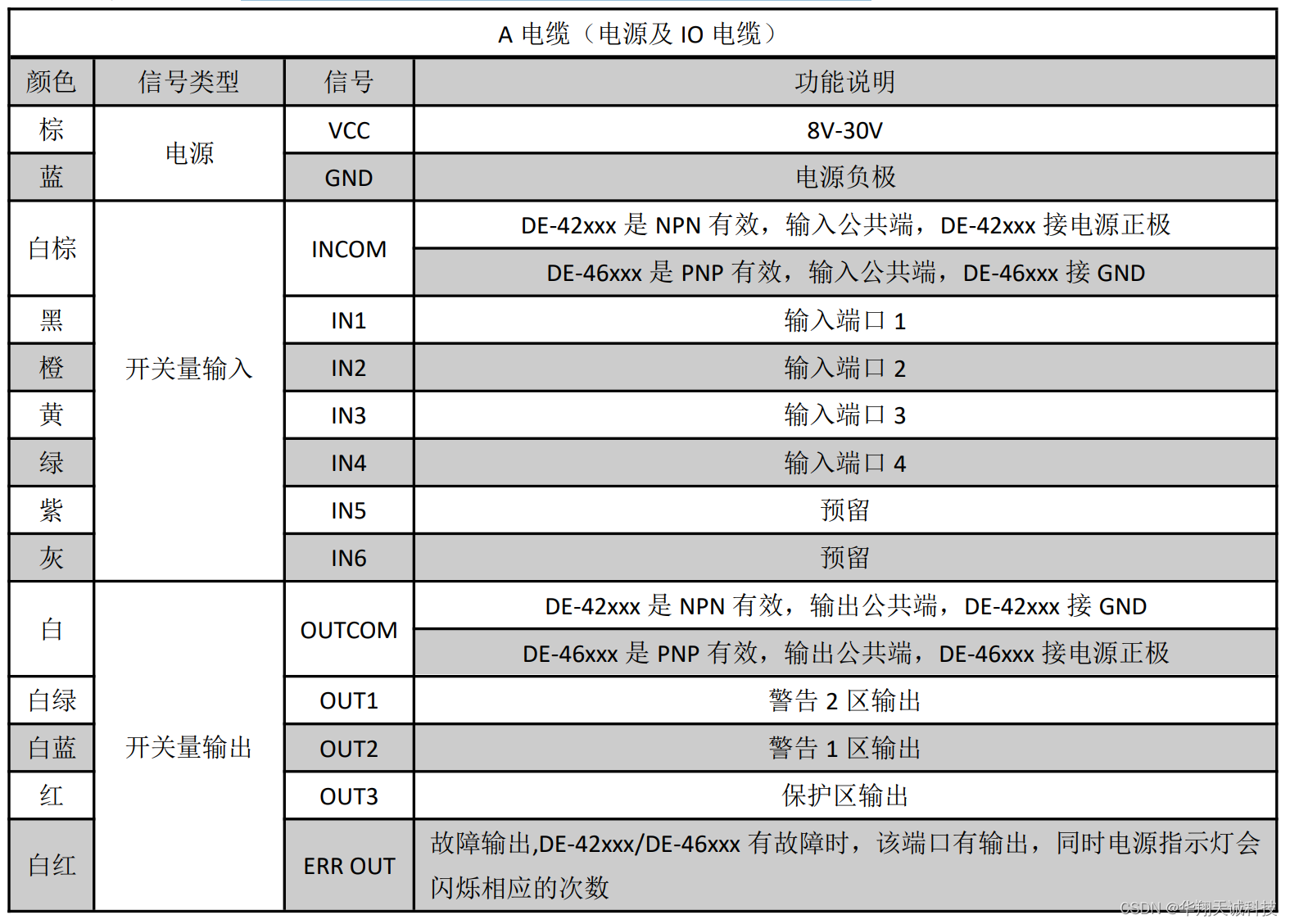
DE-42xxx/DE-46xxx 引出 A 电缆,A 电缆定义按照如下表格对应
3.2、激光障碍物传感器|避障雷达DE系列指示灯

3.3、激光障碍物传感器|避障雷达DE系列开关量输入输出及通道切换
3.3.1、 DE-42xxx 开关量输入连线
DE-42xxx 的输入端口采用光耦隔离输入,电气原理图如下所示:
ON:状态:输入电压小于 0.3V;
OFF 状态:端口悬空;
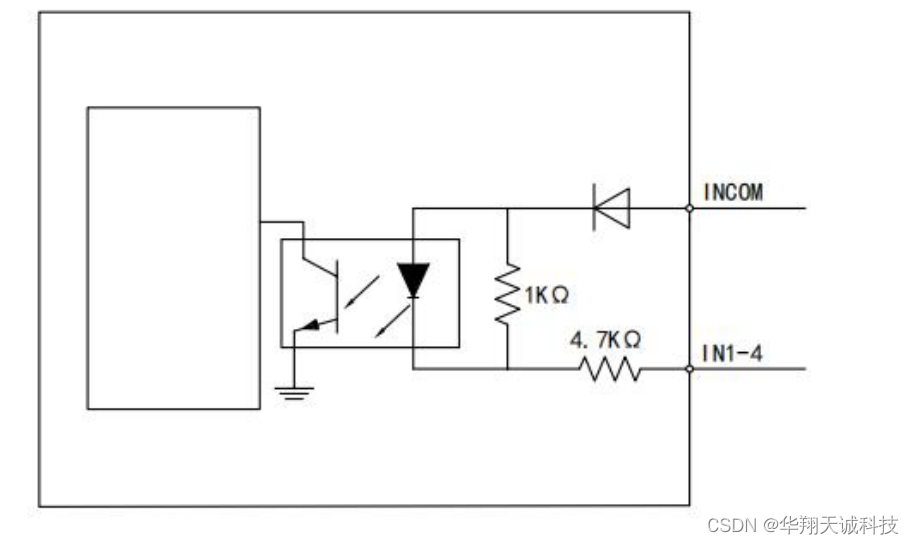
以下是以晶体管输入、开关输入为例的接线图

3.3.2、DE-42xxx 开关量输出连线
DE-42xxx 的输出端口为集电极开路(NPN)信号,采用光耦隔离输出,输出有信号时候电压为 0V,输出端 口最大带载能力为 100mA,内部电路图如下所示:
ON:状态:输出电压小于 0.3V;
OFF 状态:端口高阻状态;
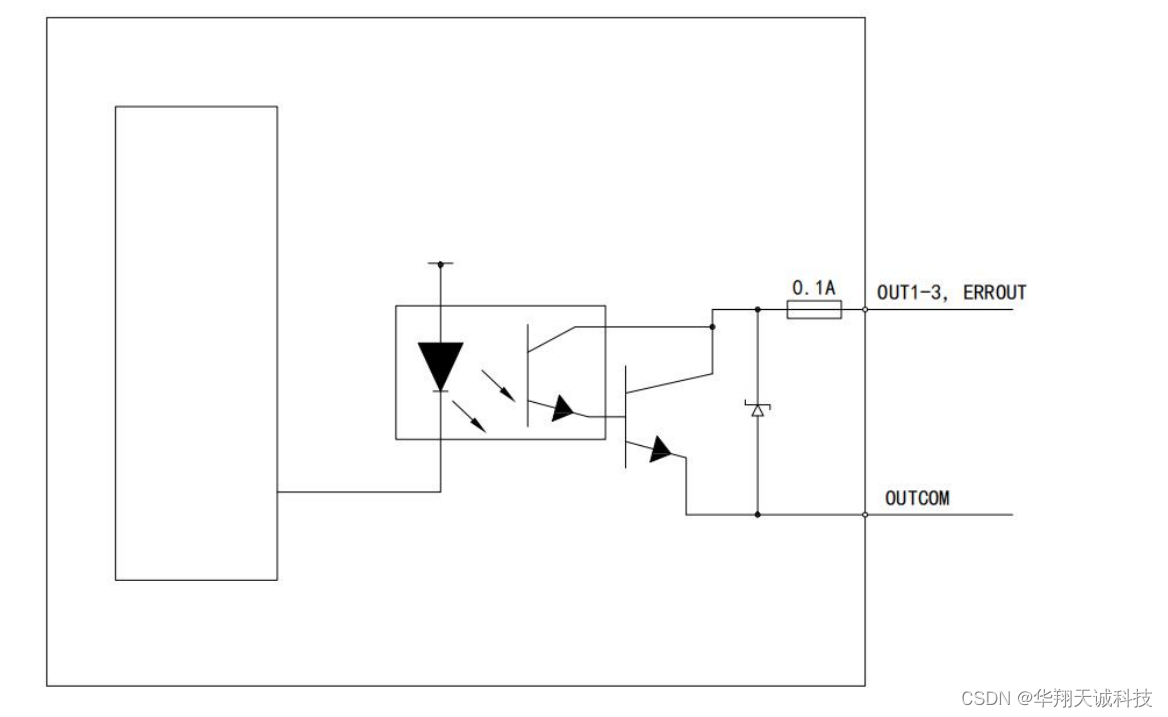
以下为 DE-42xxx 输出接线

3.3.3、DE-46xxx 开关量输入连线
DE-46xxx 的输入端口采用光耦隔离输入,电气原理图如下所示:
ON:状态:输入电压大于 5V;
OFF 状态:端口高阻状态;

3.3.4、DE-46xxx 开关量输出连
DE-46xxx 的输出端口为集电极开路(PNP)信号,采用光耦隔离输出,输出有信号时候电压为输入电源电压, 输出端口最大带载能力为 100mA,内部电路图如下所示:
ON:状态:输出电压大于 5V;
OFF 状态:端口高阻状态

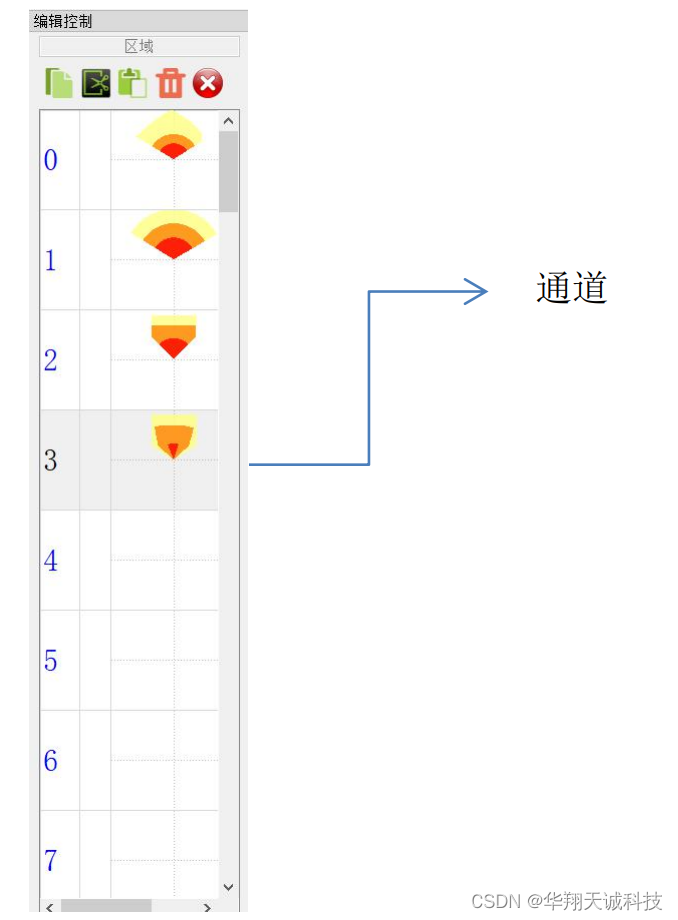
4、激光障碍物传感器|避障雷达DE系列通道切换
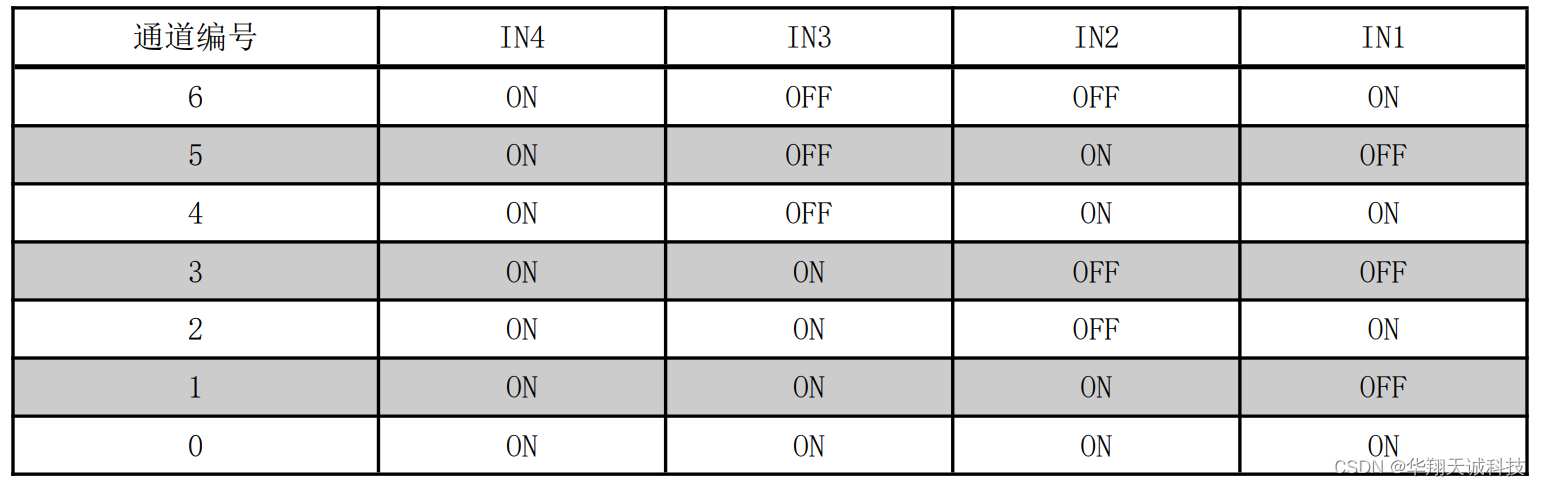
DE-42xxx/DE-46xxx 提供 4 个输入信号以切换 0-15 号通道
ON:输入有信号; 0FF:输入无信号或者

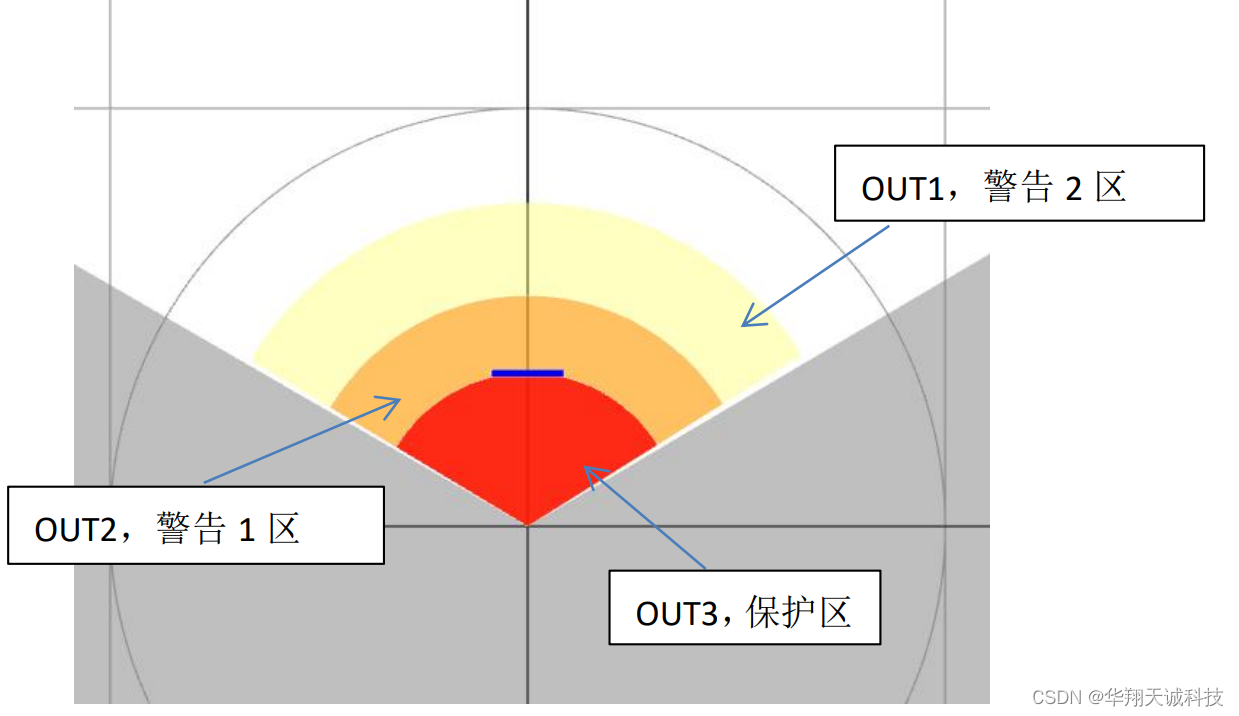
OUT1:用于远端障碍物检测,对应配置软件的输出 1,定义为警告 2 区,有障碍物入侵该区时,该端口输 出低电平;
OUT2:用于中端障碍物检测,对应配置软件的输出 2,定义为警告 1 区,有障碍物入侵该区时,该端口输 出低电平;
OUT3:用于近端障碍物检测,对应配置软件的输出 3,定义为保护区,有障碍物入侵该区时,该端口输出 低电平; ERROUT:DE-42xxx/DE-46xxx 发生故障时,该端口输出低电平; 警告 2 区、警告 1 区、保护区定义如下:
注意:
对应输出有绘制图形时,才会有检测输出;
输入输出端口不能短路或者接入超过规定电流的负载,不然会造成传感器损坏。
更多关于120°AGV|RGV小车激光障碍物传感器|避障雷达DE系列安装与连线方法,华翔天诚科技欢迎你的咨询与交流!
这篇关于120°AGV|RGV小车激光障碍物传感器|避障雷达DE系列安装与连线方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




