雷达专题
Xiaojie雷达之路---雷达间干扰(二)置零法对干扰抑制
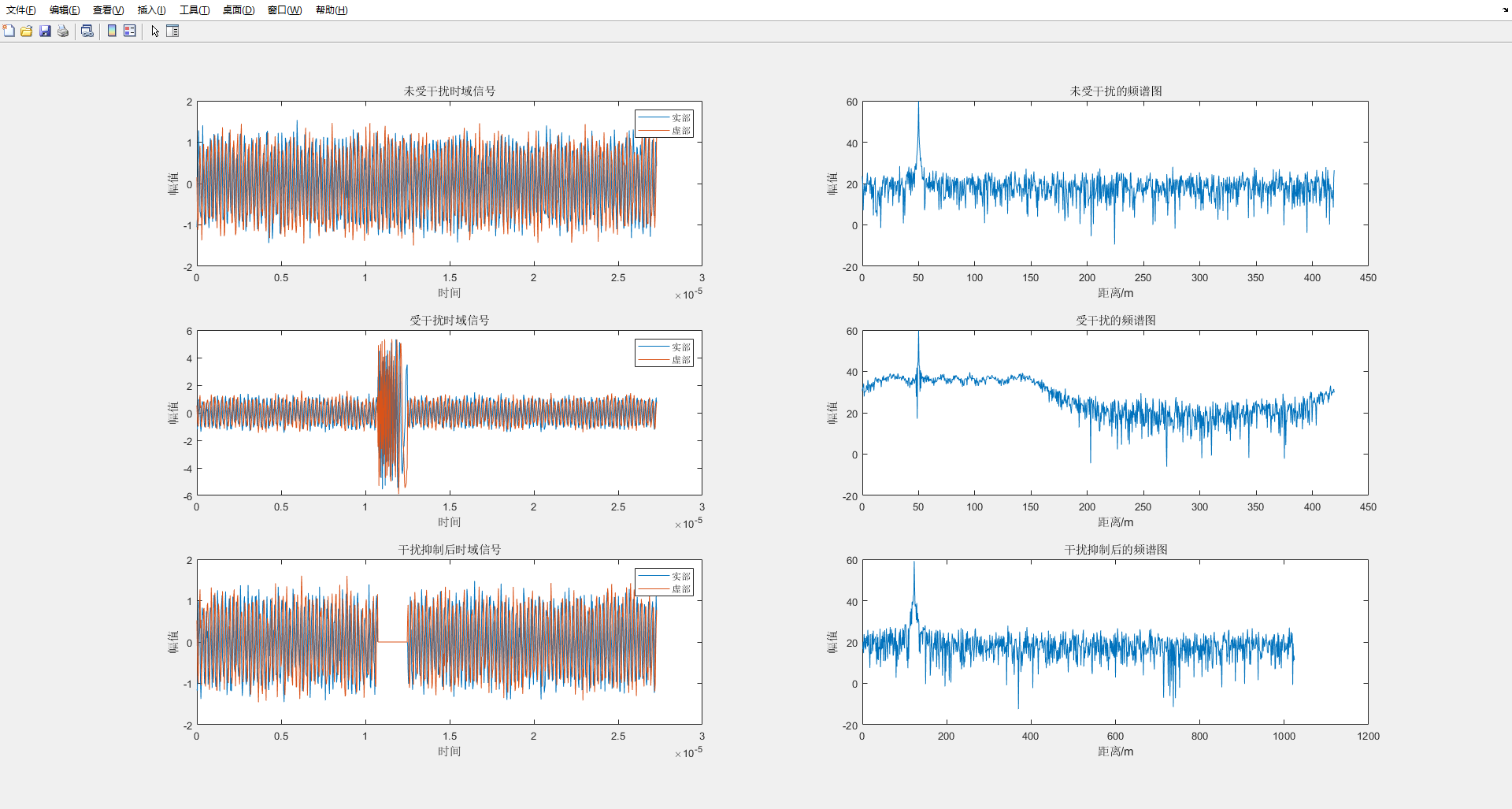
Hello,大家好,我是Xiaojie,欢迎大家能够和Xiaojie来一起学习毫米波雷达知识,本篇文章主要是介绍一下时域置零对雷达间干扰抑制的效果,一起来看看吧!!! 文章目录 前言正文原理性介绍代码 前言 在上一篇文章中介绍了BPM对雷达间干扰抑制的方法,而本篇文章是采用时域置零的方法进行雷达间干扰抑制 效果图: 视频如下: 雷达间干扰 正文
【R语言 可视化】R语言画雷达图
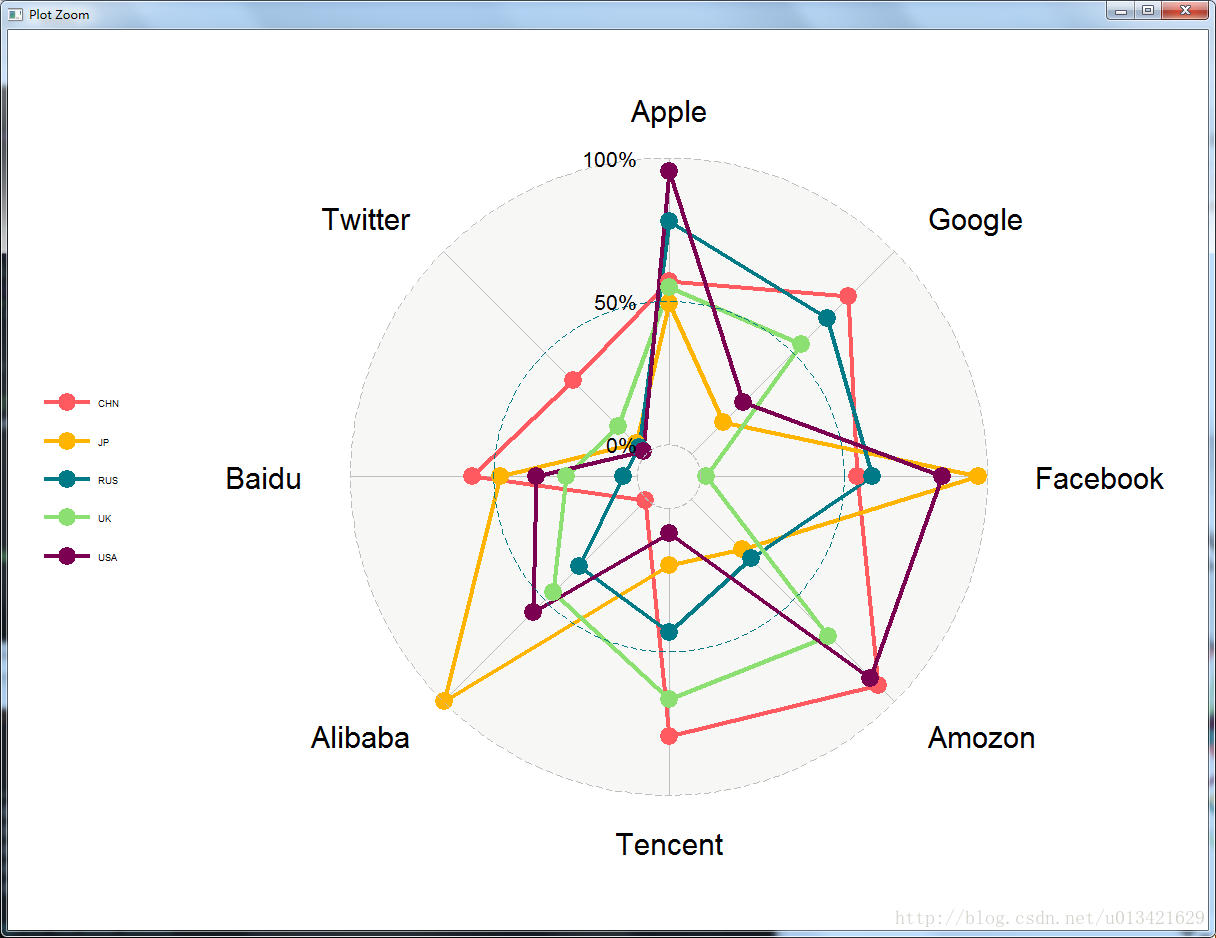
1、安装插件 github网址: https://github.com/ricardo-bion/ggradar devtools::install_github("ricardo-bion/ggradar")install.packages("knitr") 2、效果图 3、源代码 rm(list=ls())gc()library(ggradar)mydata<-ma

ECharts实现雷达图详解
ECharts 是一款由百度开源的数据可视化工具,它提供了丰富的图表类型,如折线图、柱状图、饼图、散点图、雷达图、地图、K线图、热力图、仪表盘等,以及丰富的交互功能。ECharts 组件的核心功能实现原理主要包括以下几个方面: 数据驱动: ECharts 采用数据驱动的设计理念,图表的生成和更新都是基于数据的。用户通过设置 option 对象来描述图表的配置,包括数据、坐标轴、系列类型、图例等

Emgu-WPF 激光雷达研究-绘制雷达图
硬件:Hokuyo URG04LX 环境:VS2017- win10- 64 Emgu_3.2.0.2682 语言:C# WPF 数据解析参考: https://sourceforge.net/p/urgnetwork/wiki/Home/ https://github.com/bqhdev/urg04lx_data_decoder http://sourceforge.ne
基于RK3568智慧交通-雷达视频融合一体机,支持鸿蒙
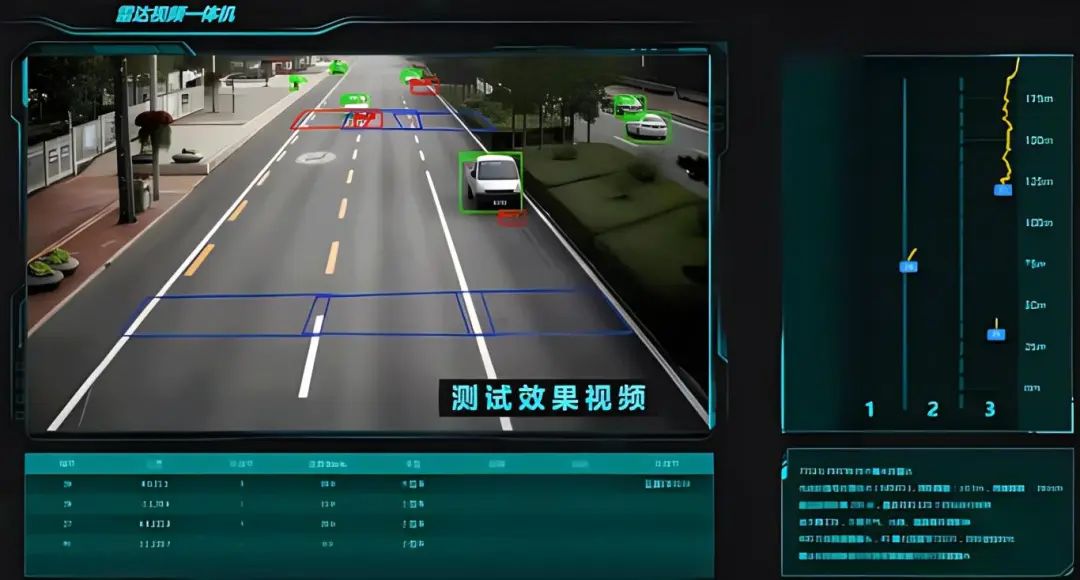
智慧交通-雷达视频融合一体机 随着5G网络与智慧交通车路协同系统在全国各点的落地,作为提升交通安全的前沿技术方案也愈发受到重视。 在交通信控领域,以往的感知技术、无论是地磁、线圈还是摄像头,功能都仅仅局限于数清经过了多少车辆,无法满足交通数字化管理对精细化、智能化管控的需求。 雷视融合一体机具备全天候和长距离的检测属性,除了统计车流量外,还可监测、跟踪车辆的运动行为特征,锁定车辆信息。同

lidar3607.2 lidar360mls7.2 强大的雷达点云数据处理应用软件
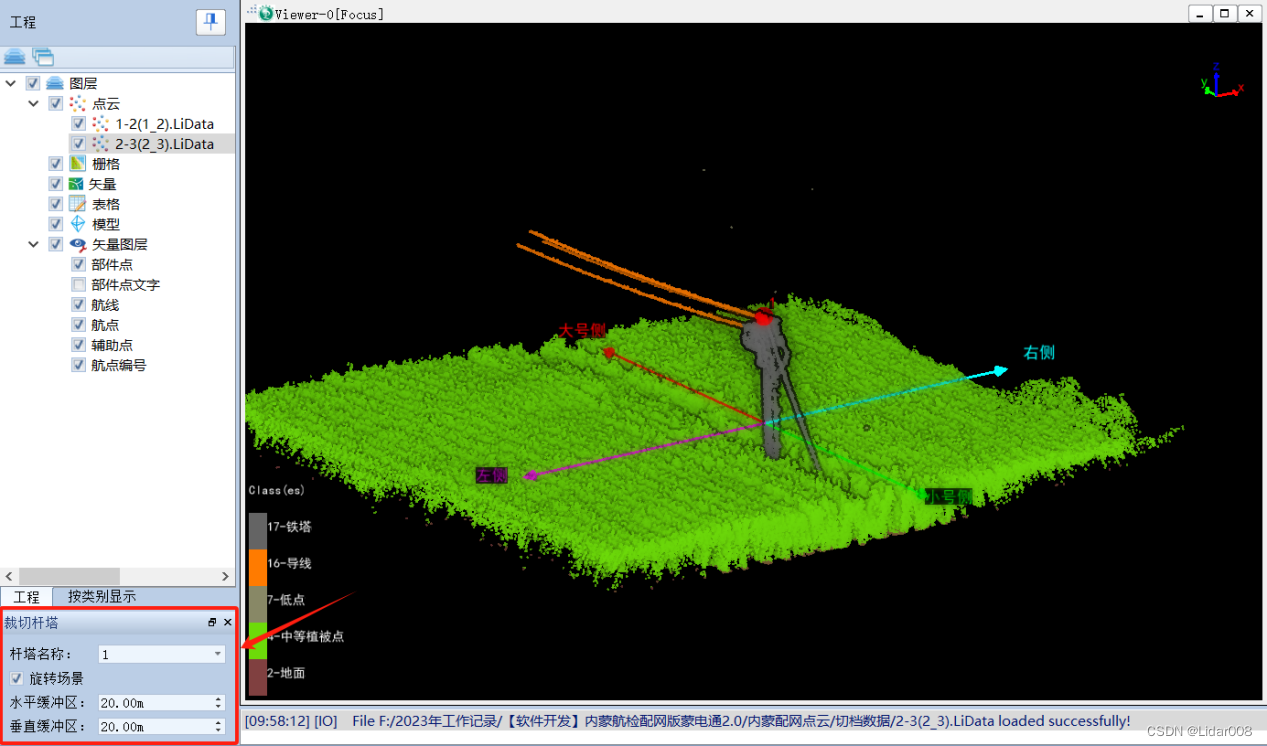
1、LiDAR360是一款强大的激光雷达点云数据处理和分析平台,拥有超过10种先进的点云数据处理算法,可同时处理超过300G点云数据。平台包含丰富的编辑工具和自动航带拼接功能,可为地形、林业、矿山和电力行业(参考LiPowerline软件)提供应用。 2、地形模块包含用于标准地形产品生产的一系列工具。点云滤波算法可精确提取复杂环境下的地面点,从而提高地形测绘精度。该

雷达水位监测站低功耗及免维护设计
QY-15雷达水位监测站采用非接触雷达,无磨损无污染产品概述 雷达水位监测站是一款高精度且具有水面波动滤波处理的地表水水位测量产品。它采用喇叭天线的设计,降低功耗,宽范围的输入电压,专门设计于适合野外无人值守的野外自动站应用,测量不受大气温度、压力、空气密度、风、降水、相对湿度的影响,具有稳定性、低功耗及免维护设计。产品具有灵活的工作模式配置。 用途 雷达测量原理适用于在测量水库、河流、

Chart.js 雷达图
Chart.js 雷达图 介绍 雷达图,也称为网络图或星图,是一种以多边形形式展示多变量数据的图表。每个轴代表一个变量,轴的长度通常是量化的,所有的轴都从同一个中心点开始,形成一个闭环。雷达图非常适合展示多个量化指标,比如技能、能力或者多个维度的性能评估。Chart.js 是一个流行的开源JavaScript图表库,它支持包括雷达图在内的多种图表类型。 Chart.js 雷达图的特点 直观
Lipowerline5.0 雷达电力应用软件下载使用
1.配网数据处理分析 针对配网线路点云数据,优化了分类算法,支持杆塔、导线、交跨线、建筑物、地面点和其他线路的自动分类;一键生成危险点报告和交跨报告;还能生成点云数据采集航线和自主巡检航线。 获取软件安装包联系邮箱:2895356150@qq.com,资源源于网络,本介绍用于学习使用,如有侵权请您联系删除! 2.新增快速版,简洁易上手 支持快速版和专业版切换使用,快速版界面简洁,保留主

AOP和BOOST雷达型号有什么区别?
摘要:TI官方例程说明中,有的指明雷达开发板型号是AOP,例如AWR1843BOOST,AWR1843AOPEVM。其实他们的最关键区别就是天线是不是封装在芯片内部了。 比如我们查一下IWR6843AOP的手册,可以看出来芯片内置了天线。AOP的意思是Antennas-On-Package。 这个电路板的外观如下图所示。 下图来源[FAQ] [参考译文] [常见问题解答] IW

如何用Vue3打造一个引人注目的3D雷达图
本文由ScriptEcho平台提供技术支持 项目地址:传送门 ApexCharts 雷达图:可视化多系列数据 应用场景介绍 雷达图是一种可视化多变量数据的多边形图表,每个变量表示雷达图上的一条射线,射线的长度表示变量的值。雷达图广泛用于展示不同指标之间的关系和变化趋势,例如产品特性对比、客户满意度调查等。 代码基本功能介绍 本代码片段使用 Vue.js 和 ApexCharts 库
ECharts 雷达图案例002 - 诈骗性质分析
ECharts 雷达图案例002 - 诈骗性质分析 📊 ECharts 雷达图案例002 - 诈骗性质分析 深入挖掘数据背后的故事,用可视化手段揭示诈骗行为的模式和趋势。 🔍 案例亮点 创新的数据展示方式,让复杂的诈骗数据一目了然。定制化的雷达图配置,专为诈骗性质分析设计。 📈 统计模式与对象 通过雷达图的多维分析,我们对不同诈骗手段的影响和特点进行了深入的探讨。从网络刷

【Rd-03E】使用CH340给Rd03_E雷达模块烧录固件
Rd03_E 指导手册 安信可新品雷达模组Rd-03搭配STM32制作简易人体感应雷达灯教程 http://t.csdnimg.cn/mqhkE 测距指导手册网址: https://docs.ai-thinker.com/_media/rd-03e%E7%B2%BE%E5%87%86%E6%B5%8B%E8%B7%9D%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8C%
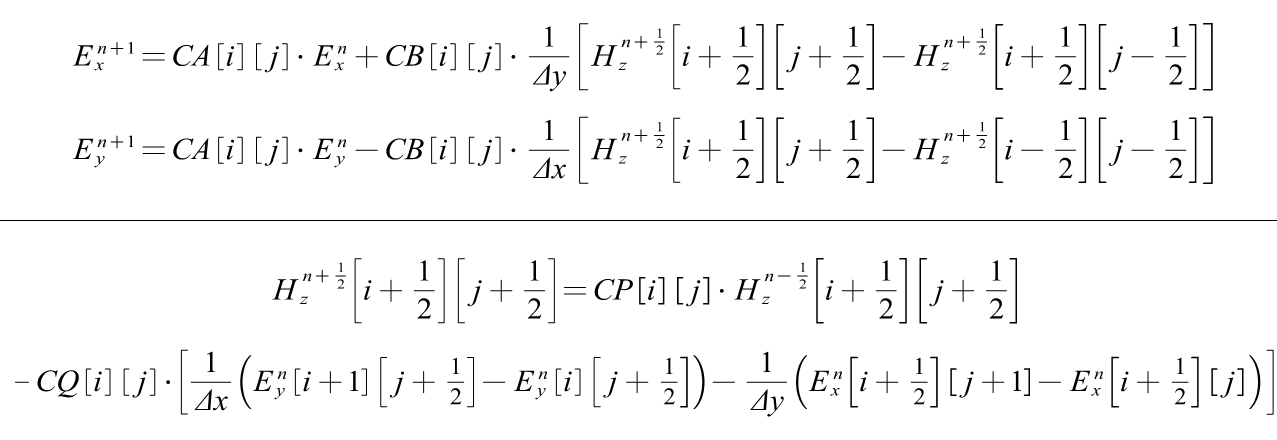
探地雷达正演模拟,基于时域有限差分方法,一
声明:本博客中的公式均是在Word中使用AxMath写好后截图使用的,欢迎引用,但请标注来源。 本系列会有四篇博客: 第一篇内容: 1、基础知识掌握 2、Maxwell方法差分求解原理 第二篇内容: 1、基于C++的TE波波动方程实现 2、边界问题的产生及处理 第三篇内容: 1、基于实际操作流程的GPR正演模拟 2、简单并行化加速GPR正演模拟 第四篇内容: 1、

278 基于Matlab GUI的中重频PD雷达仿真系统
基于Matlab GUI的中重频PD雷达仿真系统。具有26页文档报告。仿真雷达信号的发射、传播、散射、接收、滤波、信号处理、数据处理的全部物理过程,因此应当实现对雷达发射机、天线、接收机、回波信号处理、数据处理的建模与仿真。程序已调通,可直接运行。 278 GUI人机交互 中重频PD雷达仿真系统 - 小红书 (xiaohongshu.com)
POJ 1328 Radar Installation 雷达安装 贪心问题求解
题目链接: POJ 1328 Radar Installation Description Assume the coasting is an infinite straight line. Land is in one side of coasting, sea in the other. Each small island is a point locating in the sea
毫米波雷达深度学习技术-1.6目标识别1
1.6 目标识别 利用检测和跟踪在距离、多普勒和角度这两个维度中的任意一个进行精确的目标定位后,将检测到的目标分类到所需的类别中。与检测类似,提出了多种框架来同时使用图像和点云进行目标分类。使用图像进行目标分类的最常见方法是从检测到的目标特征中沿距离-角度和距离-多普勒维提取手工设计的特征[32-34]。最常见的特征是距离、多普勒、到达方向的平均值,以及从唯一目标簇中检测到的所有
【雷达原理】一维CFAR检测算法——对比分析与代码实现
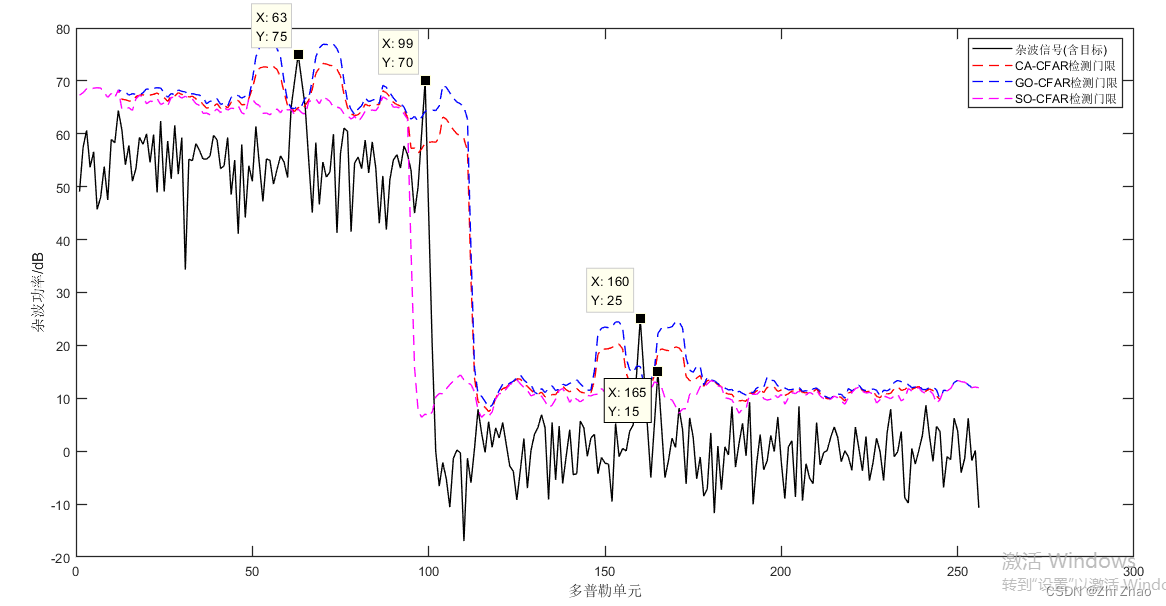
目录 引言一、仿真实例1.1 均匀背景杂波1.2 杂波边缘1.3 多干扰目标杂波 二、MATLAB代码参考文献 引言 推荐博文【目标检测】雷达目标CFAR检测算法 上述文章介绍了四种典型CFAR检测算法的特点及性能对比。本文将利用MATLAB进行仿真,通过实例验证和对比这几种算法的优缺点。 一、仿真实例 为客观评价CFAR检测器的性能,Rohling从背景杂波区域均匀
毫米波雷达深度学习技术-1.6目标识别2
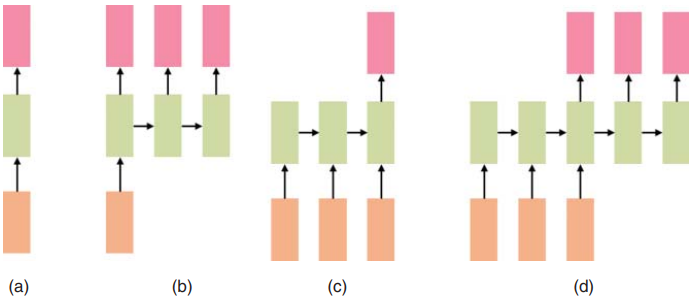
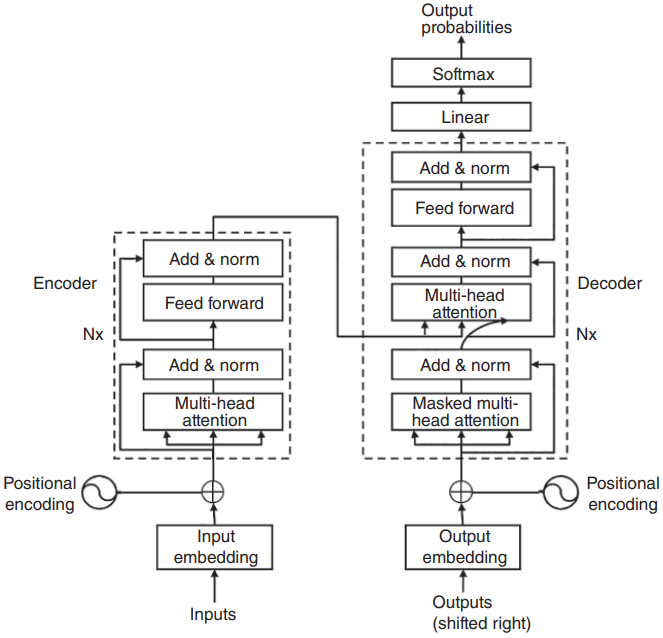
1.6.4 自动编码器和变体自动编码器 自编码器包括一个编码器神经网络,随后是一个解码器神经网络,其目的是在输出处重建输入数据。自动编码器的设计在网络中施加了一个瓶颈,它鼓励原始输入的压缩表示。通常,自编码器旨在利用数据中的关键结构将输入压缩成网络的瓶颈或潜在空间表示,这足以重建原始输入数据。因此,它被用于降维和去噪等应用。 该模型包括一个由θ参数化的编码器函数g和一个
镭神雷达在lio-sam中使用的数据格式修改
有两点修改,一、重新定义点云类型,二、修改点云时间 重新定义点云类型 // leishen lidarstruct LeiShenPointXYZIRT {PCL_ADD_POINT4DPCL_ADD_INTENSITY;uint16_t ring;double time;EIGEN_MAKE_ALIGNED_OPERATOR_NEW} EIGEN_ALIGN16;POINT
毫米波雷达阵列天线设计综合1(MATLAB仿真)
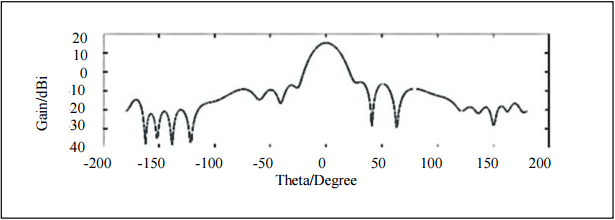
1 天线设计目标 毫米波雷达探测目标的距离、速度和角度,其中距离和角度和天线设计相关性较强。天线增益越高,则根据雷达方程可知探测距离越远;天线波束越窄,则角度分辨率越高;天线副瓣/旁瓣越低,则干扰越少,虚假目标越少。 天线的性能直接影响雷达性能,现代的毫米波雷达几乎都使用阵列天线。阵列天线是根据电磁波在空间相互干涉的原理,把具有相同结构、相同尺寸的基本天线单元按照一
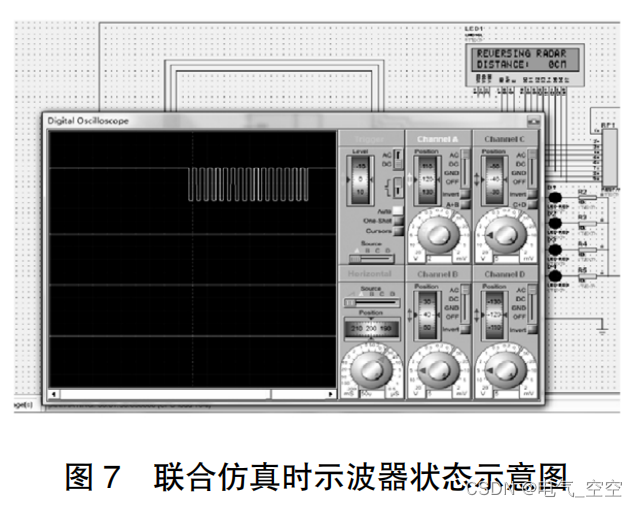
基于单片机的超声波倒车雷达设计
摘 要:文 章设计了一种基于单片机的超声波倒车雷达系统,以 AT89C51 型单片机作为控制核心,集距离测量、显示,方位显示和危险报警于一体,以提高驾驶者在倒车泊车时的安全性和舒适性。本设计采用 Keil 软件对系统程序进行调试,并采用 Proteus 对整个系统进行了仿真,仿真结果达到了预期的效果。 关键词:超声波;测距;单片机;倒车雷达 前言 近年来,随着驾
比较(二)利用python绘制雷达图
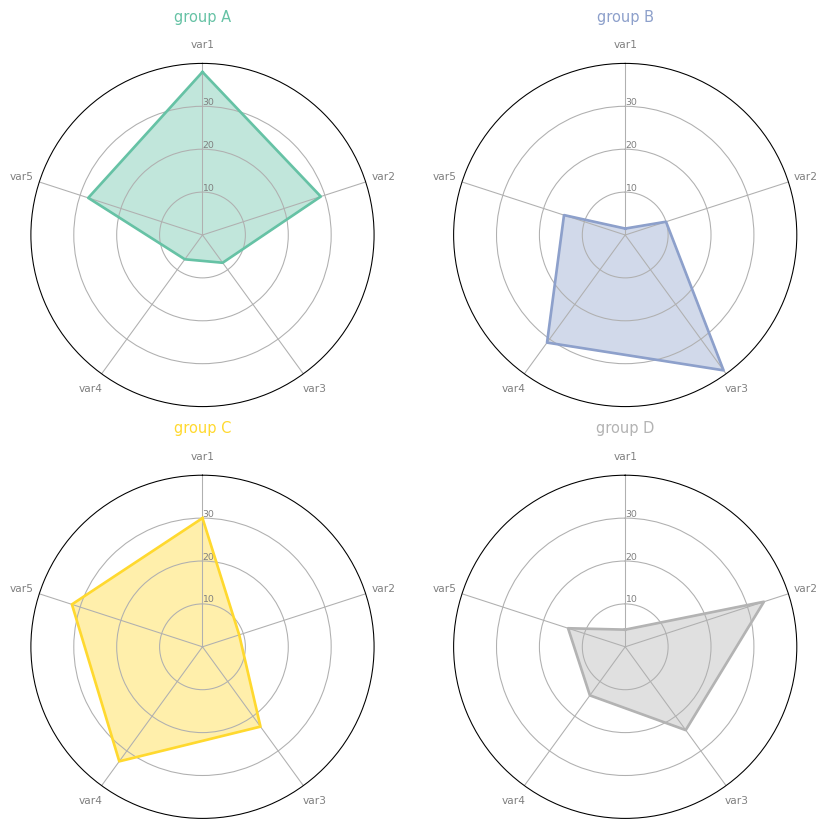
比较(二)利用python绘制雷达图 雷达图(Radar Chart)简介 雷达图可以用来比较多个定量变量,也可以用于查看数据集中变量的得分高低,是显示性能表现的理想之选。缺点是变量过多容易造成阅读困难。 快速绘制 基于matplotlib import matplotlib.pyplot as pltimport pandas as pdfrom math import pi#
STM32 | 超声波写倒车雷达小系统
01、知识回顾 STM32 | HC-SR04 超声波测距模块 | DHT11数字温湿度传感器(第七天)STM32 | 数字温湿度传感器DHT11STM32 | HC-SR04 超声波测距模块STM32 | DHT11数字温湿度传感器实战STM32 | 超声波实战STM32 | 方式1:手机发送指令,开发板向手机发送温湿度;方式2:手机发送指令,开发板定时向手机发送温湿度。 02、作业2

红外超声波雷达测距(water)
文章目录 一 RS-232二 RS485三 Modbus四 stm32多路超声波测距4.1 设计方案4.2 代码 参考资料总结 实验要求 一. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。 1)测试数据包含噪声,程序需要进行滤波处理;将测距数值通过串口上传到上位机串口助手; 2)根据障碍物距离远近,控