本文主要是介绍智能驾驶badcase - 理想l7 石墩太矮,路面有坡度,同时石墩光面反光,导致雷达误判,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
父文章
智能驾驶badcase list_个人渣记录仅为自己搜索用的博客-CSDN博客
理想l7石头墩
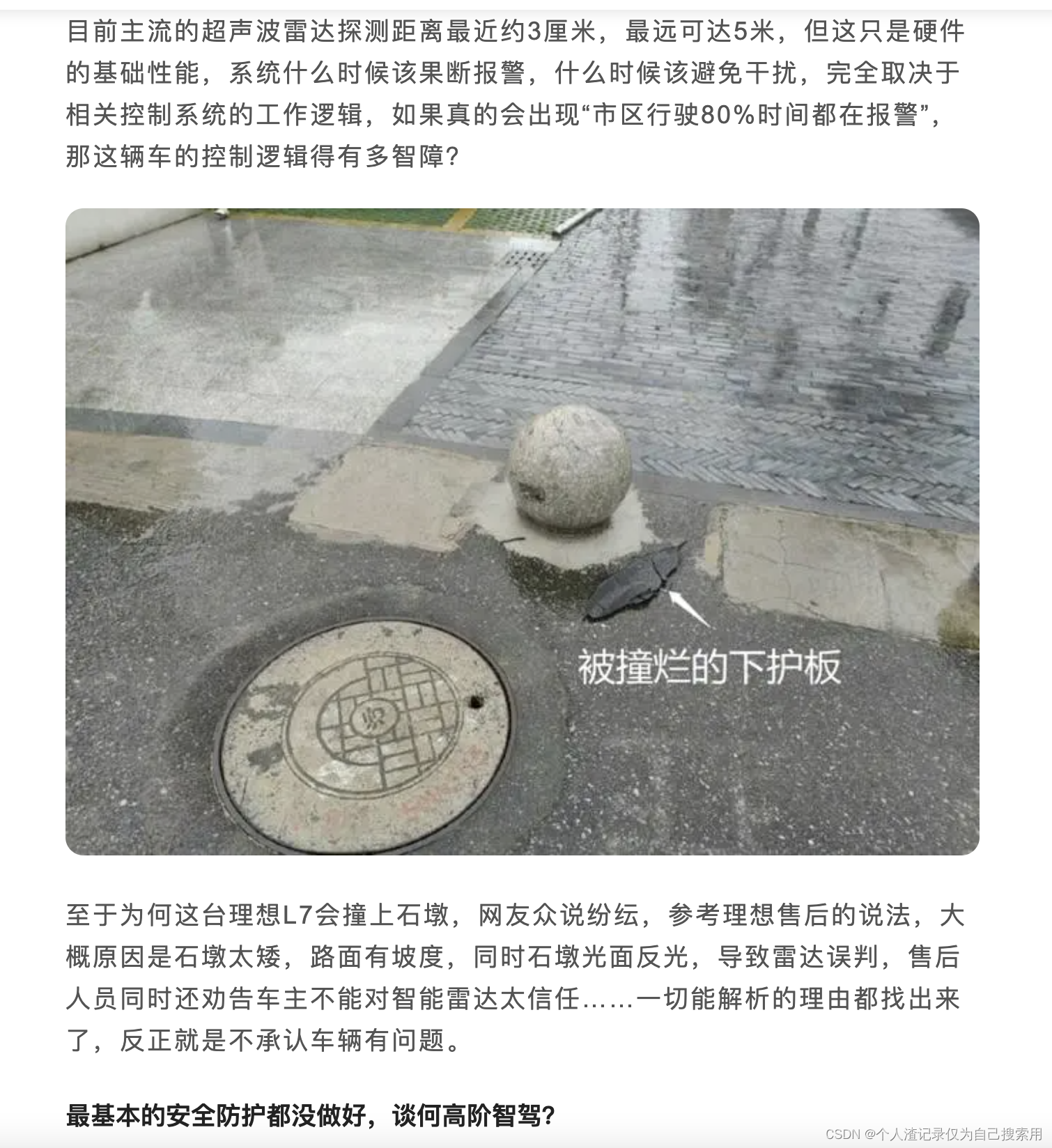
目前主流的超声波雷达探测距离最近约3厘米,最远可达5米,但这只是硬件的基础性能,系统什么时候该果断报警,什么时候该避免干扰,完全取决于相关控制系统的工作逻辑,如果真的会出现“市区行驶80%时间都在报警”,那这辆车的控制逻辑得有多智障?
至于为何这台理想L7会撞上石墩,网友众说纷纭,参考理想售后的说法,大概原因是石墩太矮,路面有坡度,同时石墩光面反光,导致雷达误判,售后人员同时还劝告车主不能对智能雷达太信任……一切能解析的理由都找出来了,反正就是不承认车辆有问题。
最基本的安全防护都没做好,谈何高阶智驾?
--
https://blog.csdn.net/fei33423/article/details/131454918?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22131454918%22%2C%22source%22%3A%22fei33423%22%7D
这篇关于智能驾驶badcase - 理想l7 石墩太矮,路面有坡度,同时石墩光面反光,导致雷达误判的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!