badcase专题
智能驾驶badcase - 理想l7 石墩太矮,路面有坡度,同时石墩光面反光,导致雷达误判
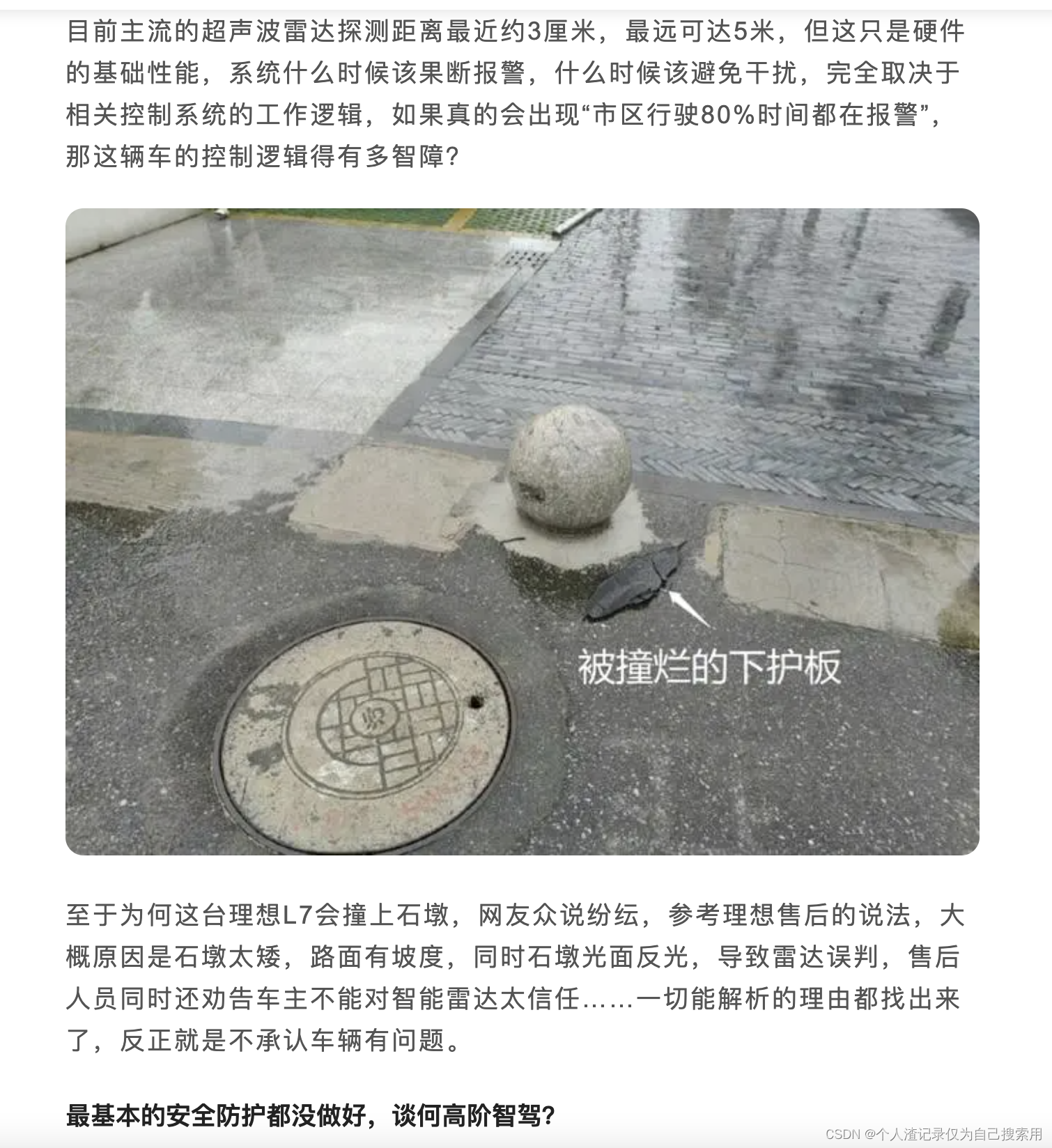
父文章 智能驾驶badcase list_个人渣记录仅为自己搜索用的博客-CSDN博客 理想l7石头墩 目前主流的超声波雷达探测距离最近约3厘米,最远可达5米,但这只是硬件的基础性能,系统什么时候该果断报警,什么时候该避免干扰,完全取决于相关控制系统的工作逻辑,如果真的会出现“市区行驶80%时间都在报警”,那这辆车的控制逻辑得有多智障? 至于为何这台理想L7会撞上石墩,网友众说纷纭
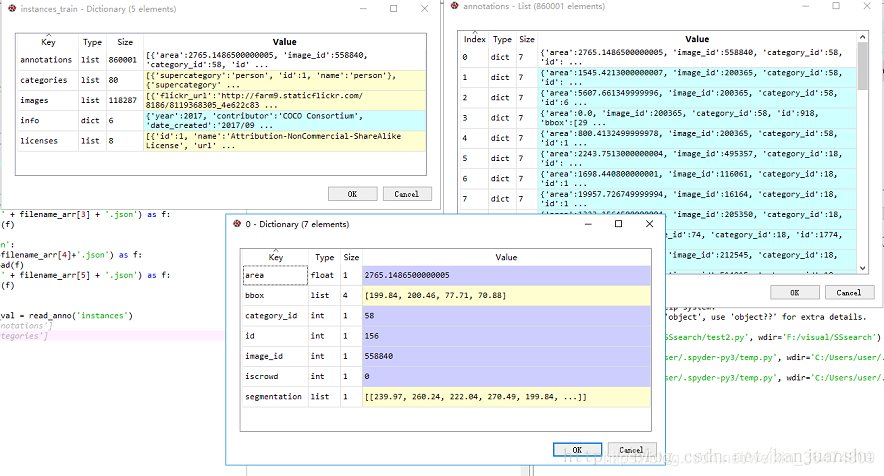
COCO数据集标注框的读取及badcase analyse
目的:查看badcase的错误的时候的框大小值。 本地调试程序至关重要,不然每次都要用服务器print,非常耗时耗力。 macOS上PyCharm本地配置Anaconda环境 博主代码地址:https://github.com/Xingxiangrui/multi_label_badcase_analyse/blob/master/badcase_analyse.py 目录 一、coc