驾驶专题

PRN(20201231):驾驶人驾驶决策机制遵循最小作用量原理
王建强, 郑讯佳, 黄荷叶. 驾驶人驾驶决策机制遵循最小作用量原理[J]. 中国公路学报, 2020, v.33;No.200(04):159-172. 观点: 为提升智能汽车的自主决策能力,使其能够学习人的决策智慧以适应复杂多变的道路交通环境,需要揭示驾驶人决策机制。 依据: 物理学中常用最小作用量原理解释自然界(包括物理和生物行为)极值现象。同时,最小作用量原理还用于解释蚂蚁在觅

【自动驾驶】控制算法(八)横向控制Ⅱ | Carsim 与 Matlab 联合仿真基本操作
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

自动驾驶系列—记忆泊车技术:未来驾驶的智能伴侣
🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中一起航行,共同成长,探索技术的无限可能。 🚀 探索专栏:学步_技术的首页 —— 持续学习,不断进步,让学习成为我们共同的习惯,让总结成为我们前进的动力。 🔍 技术导航: 人工智能:深入探讨人工智

【自动驾驶】汽车智能驾驶计算芯片
文章目录 概述 术语 硬件要求 软件要求 性能要求 安全性要求 可靠性要求 试验方法 概述 本文介绍汽车智能驾驶计算芯片的软硬件要求、 可靠性和安全性要求、 性能要求,和相应的试验方法。除了用于汽车智能驾驶, 其他领域的计算芯片可参照执行。 术语 智能驾驶计算芯片 (computing chip),用于L0至L5驾驶自动化功能计算

自动驾驶真正踏出迈向“用户”的第一步:IROS24新SOTA提出个性化的实例迁移模仿学习
导读: 本文针对自动驾驶规划任务,提出了一种基于实例的迁移模仿学习方法,通过预先训练的微调框架从专家域迁移专业知识,以解决用户域数据稀缺问题。实验结果显示,该方法能有效捕捉用户驾驶风格并实现具有竞争力的规划性能,但仍需开发合适的用户风格测量方法。©️【深蓝AI】编译 1. 摘要 个性化运动规划在自动驾驶领域中具有重要意义,可以满足个人用户的独特需求。然而,以往的工作在同时解决两个关键问题

VLM视觉语言大模型在智能驾驶中的应用
VLM在自动驾驶中的任务 single or multiple Object Referring 即带条件的目标检测,用语言指示模型识别图像中特定目标。 Referred Object Tracking 和Object Referring相比,Object Referring Tracking会根据自然语言描述在连续帧中对目标进行跟踪。 Open-Vocabulary 3D Objec

【自动驾驶】控制算法(七)离散规划轨迹的误差计算
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将


【ShuQiHere】自动驾驶技术与各大汽车品牌的战略布局:全球竞赛与中国崛起
【ShuQiHere】:从“萝卜快跑”的成功谈起 🌟 2024年,中国的自动驾驶领域迎来了一个具有里程碑意义的事件——百度的“萝卜快跑”(Apollo Go)项目在多个城市成功试运营🎉。这一经过十年精心研发的自动驾驶出租车服务,不仅展示了中国科技企业在自动驾驶技术上的迅猛进步,更象征着中国在全球科技竞赛中的强势崛起🏆。 “萝卜快跑”从一开始的概念到如今的商业化落地,走过了一段充满挑战的历
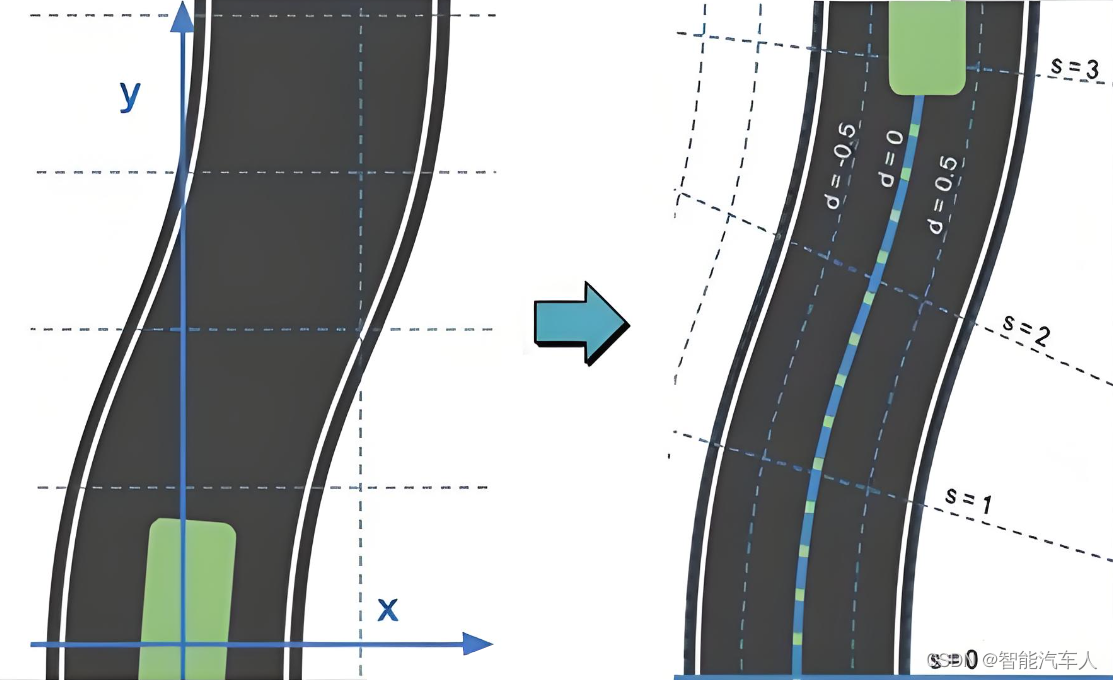
自动驾驶---什么是Frenet坐标系?
1 背景 为什么提出Frenet坐标系?Frenet坐标系的提出主要是为了解决自动驾驶系统在路径规划的问题,它基于以下几个原因: 符合人类的驾驶习惯: 人类驾驶员在驾驶过程中,通常不会关心自己距离起点的横向和纵向距离,而是会关注车辆相对于道路的相对位置,比如与车道线的距离。Frenet坐标系提供了一种与人类驾驶习惯相符的描述方式,使得自动驾驶系统能够更好地模拟人类的驾驶行为。

Carla自动驾驶仿真十:Carlaviz三维可视化平台搭建
文章目录 前言一、环境准备1、docker安装2、websocket-client安装3、carlaviz代码下载 二、carlaviz使用1、打开carla客户端2、输入启动命令3、进入carlaviz4、修改manual_control.py脚本5、运行manual_control.py脚本6、运行carlaviz官方脚本(推荐) 前言 Carlaviz是一个开源的

【自动驾驶】决策规划算法 | 数学基础(二)凸优化与非凸优化
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将
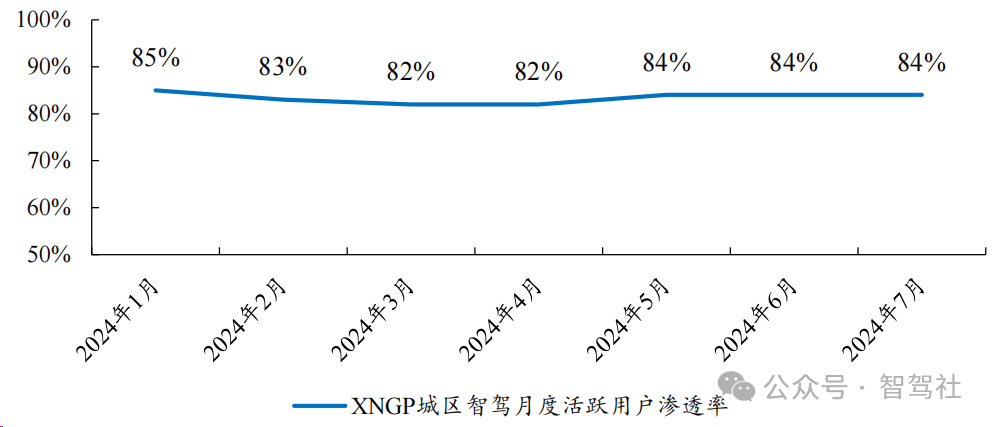
从小鹏看自动驾驶发展趋势
小鹏:端到端大模型量产落地,体验升级成下阶段主线 算法端,小鹏已量产国内首个端到端大模型,其模型采用分段式结构,分为神经网络 XNet、规控大模型 XPlanner 以及大语言模型 XBrain 三部分。数据闭环方面,小鹏的全栈数据闭环能够实现对数据的清晰处理以及高效的挖掘和解读,测试阶段实车测试与仿真测试并重,加快迭代节奏。云端算力方面,小鹏云端算力储备已达到 2.51EFlops。投入端

【自动驾驶】决策规划算法概述
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

自动驾驶-机器人-slam-定位面经和面试知识系列10之高频面试题(04)
这个博客系列会分为C++ STL-面经、常考公式推导和SLAM面经面试题等三个系列进行更新,基本涵盖了自己秋招历程被问过的面试内容(除了实习和学校项目相关的具体细节)。在知乎和牛客也会同步更新,全网同号(lonely-stone或者lonely_stone)。 关于高频面试题和C++ STL面经,每次我会更新10个问题左右,每次更新过多,害怕大家可能看了就只记住其中几个点。(在个人秋招面试过程中,

【自动驾驶】控制算法(五)连续方程离散化与离散LQR原理
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

【自动驾驶】控制算法(四)坐标变换与横向误差微分方程
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

计算机毕业设计opencv+pytorch疲劳驾驶检测系统 自动驾驶 面部多信息特征融合的疲劳驾驶检测系统 驾驶员疲劳驾驶风险检测 深度学习 机器学习 大数据
创新点:算法模型训练、可视化、深度学习框架、疲劳监测、模拟自动驾驶检测驾驶员疲劳 核心算法:基于多信息特征指标融合建立驾驶员疲劳评价体系 通过构建一种驾驶员面部多信息特征融合综合评价方法,为了能够将系统检测结果更直观的体现,研究了基于一种改进的粗糙集理论对各项特征结果做决策融合处理,将离散化的问题进行归一化处理,便于判定当前驾驶员疲劳状态等级。 驾驶员疲劳驾驶风险检测是中国道路交通安全重要的研究
强化学习在自动驾驶系统中的应用
强化学习在自动驾驶系统中的应用 目录 一、引言 二、强化学习的定义 三、强化学习的常用属性 四、强化学习在自动驾驶系统中的应用案例 五、总结 一、引言 自动驾驶技术是近年来人工智能领域的一个重要研究方向,旨在使汽车能够自主地感知环境、做出决策并执行相应的操作。强化学习作为一种基于试错的学习方法,已经在自动驾驶系统中得到了广泛的应用。本文将对强化学习在自动驾驶系统中的应用进行
神经重建在自动驾驶模拟中的应用
验证自动驾驶软件需要数百万公里的测试。这不仅意味着系统开发周期长,而且系统的复杂度也会不断增加,同时,大规模的实车测试也会耗费巨量的资源并且可能会面临未知的安全问题。aiSim这样的虚拟仿真工具可以减轻真实世界测试的负担。 AD和ADAS系统依靠闭环验证来确保安全性和性能。然而,实现闭环评估需要一个能够准确代表真实世界场景的3D环境。虽然这些3D环境可以由3D设计工程师手工构建,但这种方案很难解
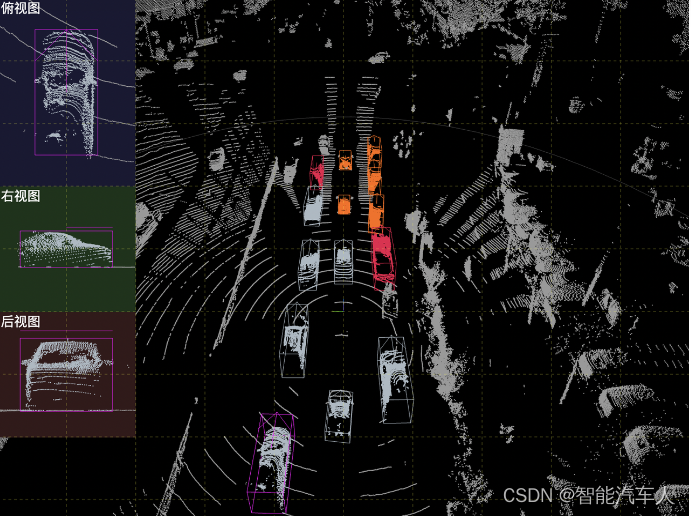
自动驾驶---Perception之Lidar点云3D检测
1 背景 Lidar点云技术的出现是基于摄影测量技术的发展、计算机及高新技术的推动以及全球定位系统和惯性导航系统的发展,使得通过激光束获取高精度的三维数据成为可能。随着技术的不断进步和应用领域的拓展,Lidar点云技术将在测绘、遥感、环境监测、机器人等领域发挥越来越重要的作用。 目前全球范围内纯视觉方案的车企主要包括特斯拉和集越,在达到同等性能的前提下,纯视觉方

自动驾驶规划中使用 OSQP 进行二次规划 代码原理详细解读
目录 1 问题描述 什么是稀疏矩阵 CSC 形式 QP Path Planning 问题 1. Cost function 1.1 The first term: 1.2 The second term: 1.3 The thrid term: 1.4 The forth term: 对 Qx''' 矩阵公式的验证 整体 Q 矩阵(就是 P 矩阵,二次项的权重矩阵)
自动驾驶⻋辆环境感知:多传感器融合
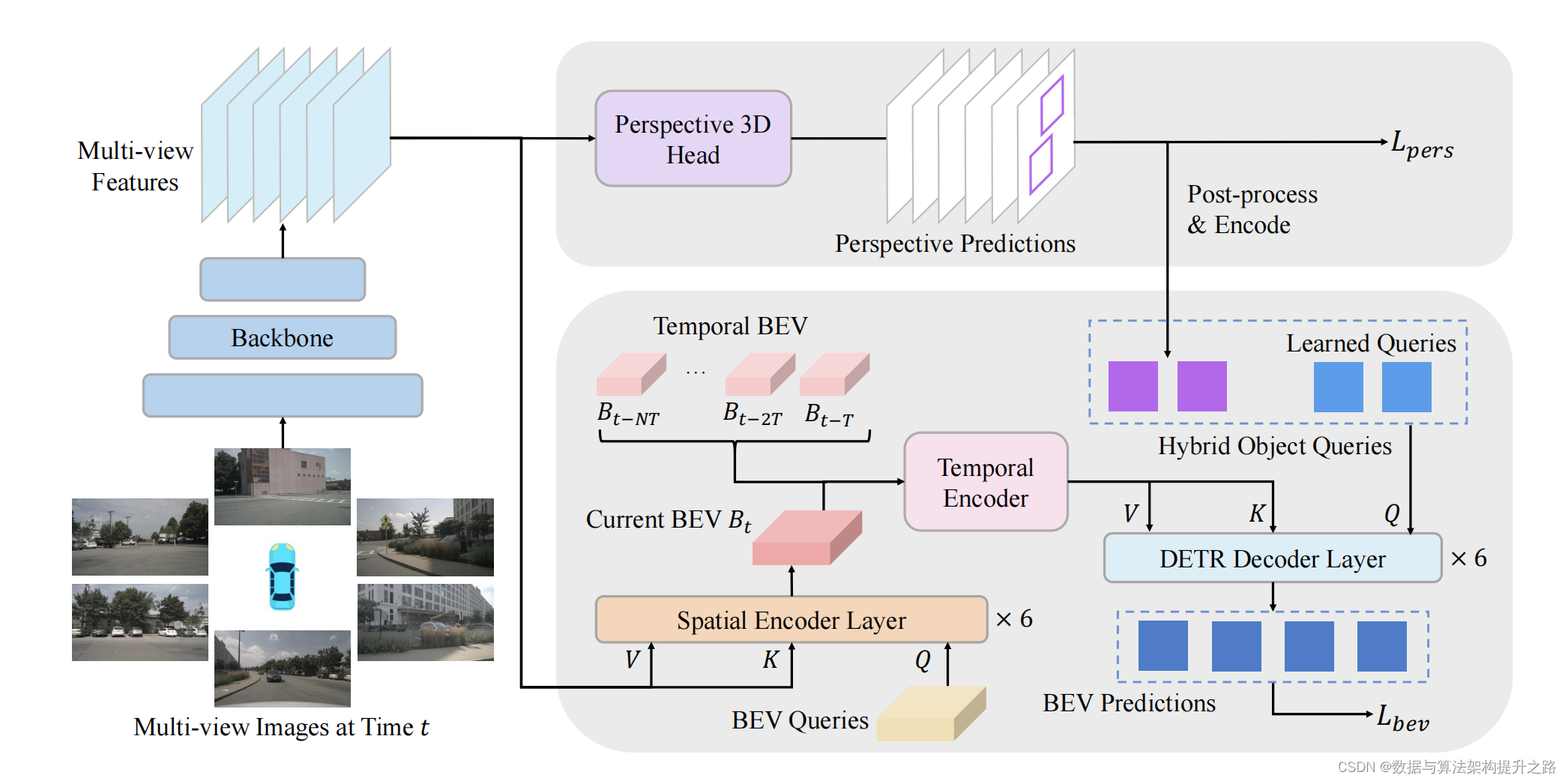
目录 一、多传感器融合技术概述 二、基于传统方法的多传感器融合 三、基于深度学习的视觉和LiDAR的目标级融合 四、基于深度学习的视觉和LiDAR数据的前融合方法 概念介绍 同步和配准 时间同步 标定 摄像机内参标定(使用OpenCV) 摄像机与LiDAR外参标定 空间同步 具体应用 4.1 BEV-LaneDet 4.2 BEVFormer v2 一、多传感器融
自动驾驶辅助功能测试用例表格(续2)
自动驾驶辅助功能测试用例表格(续) 用例编号测试类型测试项目测试描述车辆准备车辆状态车辆场景车辆执行可变因素具体信号状态通过标准预期标准通过/失败TJA-001功能测试交通拥堵辅助 (TJA)测试TJA系统在交通拥堵情况下的自动跟车和保持车道功能TJA系统已激活车辆处于交通拥堵状态城市道路1. 激活TJA系统,在拥堵情况下让车辆自动跟车和保持车道交通拥堵程度,周围车辆的行驶情况TJA系统能够
自动驾驶仿真测试用例表格示例 ACC ELK FCW
自动驾驶仿真测试用例表格示例 测试用例概览 本测试用例表格涵盖了自动驾驶系统中多个关键功能和场景的测试,旨在确保系统在不同条件下的表现和稳定性。 用例编号测试项目测试描述预期结果实际结果通过/失败TC-001ACC功能测试在高速公路上启用ACC,测试车辆跟车距离的稳定性和响应速度车辆能够保持设定的跟车距离,并在前车减速时自动减速TC-002自动换道功能测试在多车道道路上测试自动换道功

【自动驾驶】什么是高字节?什么是低字节?
文章目录 高字节和低字节的定义举例说明如何从传感器数据中组合高字节和低字节代码解析 在计算机和电子工程领域,高字节和低字节是指数据字的高位部分和低位部分。一个数据字通常由多个字节组成,例如16位的数据字由2个字节组成。 高字节和低字节的定义 高字节(High Byte):在一个多字节数据中,高字节是包含最高有效位的字节。例如,对于一个16位(2字节)数据,高字节是高8位的部