误判专题

V---机器视觉图像误判产生的因素
1.环境光 (1)图像传感器周围的光照产生的影响; (2)外接的强光产生的影响,造成图像的差异; 2.产品的个体差异 (1)产品批次变更; (2)测试时使用的样品和实际生产的产品的制作环境不同,实际生产产品有细微差异,造成干扰。 3.产品来料位置不同造成的差异 (1)假如产品移动到图像传感器视野的角落时,可能会产生形变,形变的差异造成误判。 (2)假如产品移动到图像传感器视野的不同

快车道不快的现象与人类误判心理学
文/郑昀 20071018 人类的思想跟人类的卵子很相像。卵子有一个“关闭”机制。 当一个精子进入后,它就“关门”了,其余的精子就进不来了。 人类的思想普遍有这类特征。 ---貌似Charlie Munger说的 我一直在寻找一个答案。这个问题也许属于心理学,也许属于社会学范畴。 问题:为什么在北京的环路上多数人都挤在最内侧车道,即使最内侧车道速度明显慢于最外侧车道,即使所谓
redis:一、面试题常见分类+缓存穿透的定义、解决方案、布隆过滤器的原理和误判现象、面试回答模板
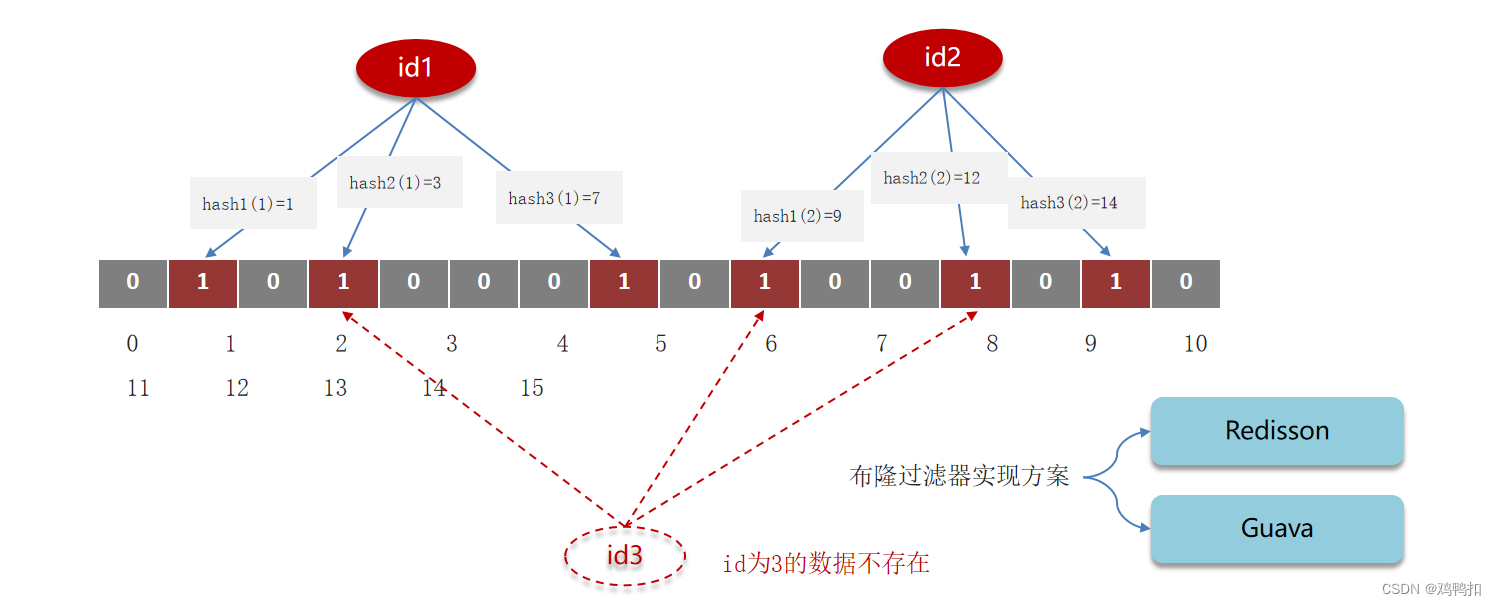
redis面试题常见分类 缓存穿透 定义 缓存穿透是一种现象,引发这种现象的原因大概率是遭到了恶意攻击。具体就是查询一个一定不存在的数据,mysql查询不到数据也不会直接写入缓存,就会导致这个数据的每次请求都需要查DB,数据库压力很大,从而挂掉。 解决方案一:缓存空数据 我们缓存空数据,查询返回的数据为空,仍把这个空结果进行缓存。 优点:简单 缺点:消耗内存,可能会发生缓存和数据库
智能驾驶badcase - 理想l7 石墩太矮,路面有坡度,同时石墩光面反光,导致雷达误判
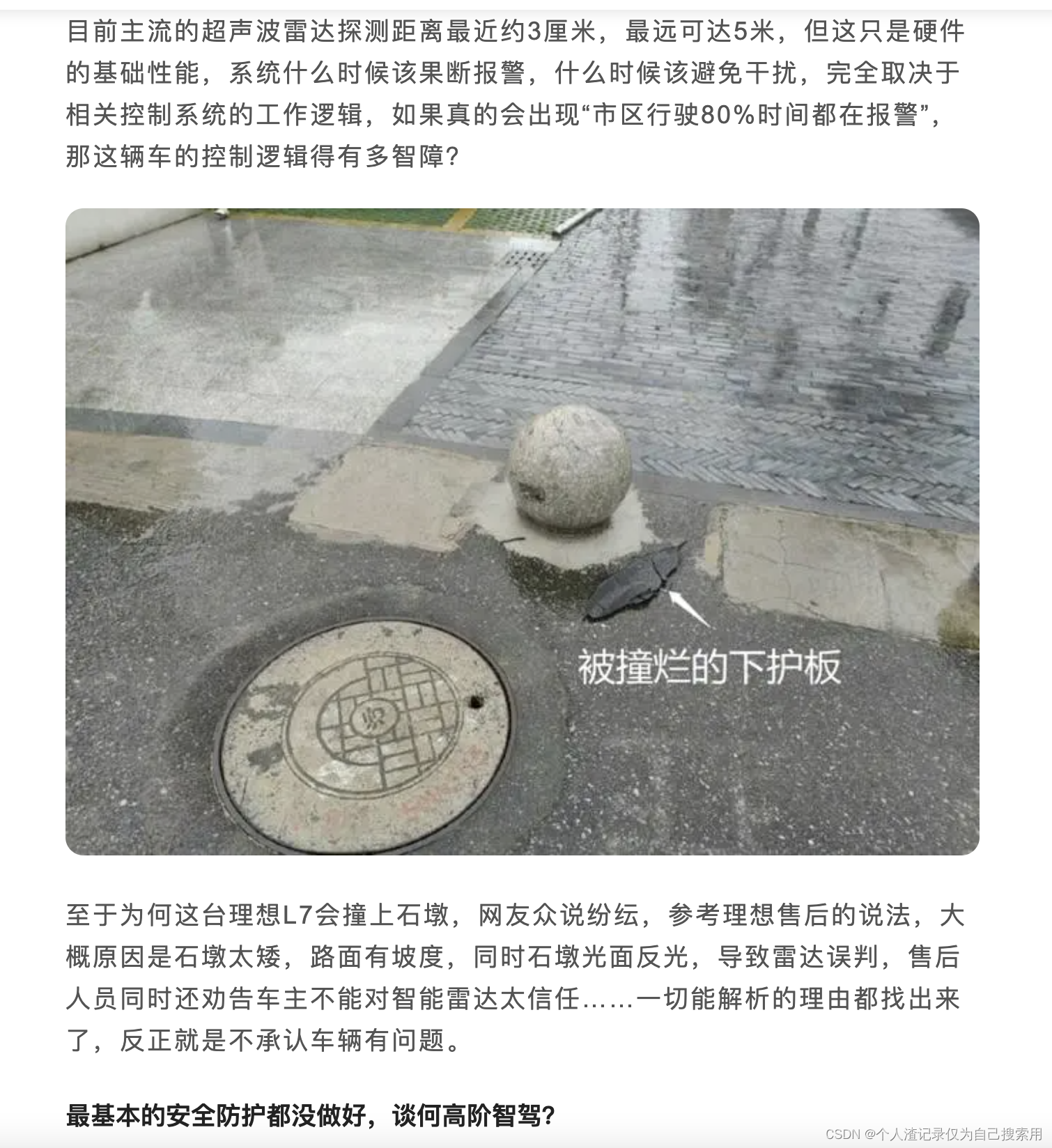
父文章 智能驾驶badcase list_个人渣记录仅为自己搜索用的博客-CSDN博客 理想l7石头墩 目前主流的超声波雷达探测距离最近约3厘米,最远可达5米,但这只是硬件的基础性能,系统什么时候该果断报警,什么时候该避免干扰,完全取决于相关控制系统的工作逻辑,如果真的会出现“市区行驶80%时间都在报警”,那这辆车的控制逻辑得有多智障? 至于为何这台理想L7会撞上石墩,网友众说纷纭
激光雷达标定板如何提高激光雷达避免误判的精准度
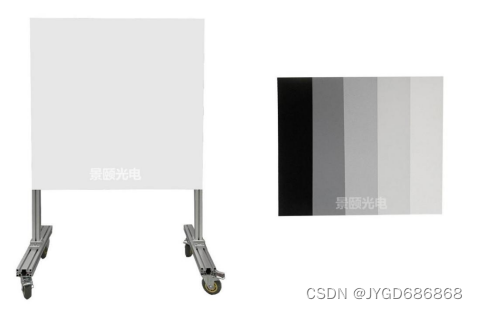
激光雷达在提高自动驾驶的安全性方面具有重要作用。它通过高精度测量、避免误判、实时感知、适应不同环境和结合其他传感器等方式,为自动驾驶系统提供准确、可靠的感知数据,从而确保行驶的安全性和稳定性。 激光雷达可以通过以下方式避免误判: 高精度测量:激光雷达可以高精度地测量周围物体的距离、位置和形状,从而更准确地感知周围环境。这有助于避免将非障碍物误判为障碍物,例如将道路上的坑洼或凸起误判为车辆等

统计判决----最小误判概率准则判决
一些概念和符号的定义 表示类出现的先验概率。表示x出现条件下出现的概率,称为类别的后验概率,换言之就是x来自类的概率。表示在 类的条件下x的概率分布密度,即类模式x的概率密度,简称类概密。 最小误判概率准则判决的一般形式 对于两类问题 显然这里可能会出现两种,一种是把实属w1类的模式判属为w2类,原因是这个模式在特征空间中散布到D2中,从而导致误判,这时的误判概率为: 同理:
汽车博主因眼睛小被辅助驾驶误判为开车睡觉!何小鹏亲自回应 蔚来已成立专门研究小组...
源 | 每日经济新闻 近日,一位汽车博主表示,他在驾驶小鹏汽车,使用小鹏辅助驾驶功能的时候,因为自己的眼睛比较小,所以被系统判定为“开车睡觉”,从而被扣除了智驾分。 据了解,“智驾分”是小鹏汽车根据是否脱手、是否及时接管、是否疲劳驾驶、是否分神等4个指标判断用户是否正确使用智能辅助驾驶功能。由于这位博主眼睛小,小鹏汽车认定他开车睡觉,因此认为他使用辅助驾驶时,“频繁分神”、“长
第33步 机器学习分类实战:误判病例分析
填最后一个坑,如何寻找误判的病例。 之前我们在介绍AUC的时候,提到了两个函数:predict和predict_proba,复习一下: auc_test = roc_auc_score(y_test, y_testprba) roc_auc_score的参数呢,包括两个:y_test是实际值,y_testprba是预测的概率(注意,是概率,而不是分类,要和y_pred做区别),来看看代码:
Java集合框架分析(九)——布隆过滤器深入分析及其误判概率计算
上篇文章简单的介绍了下布隆过滤器,让大家知道了下其原理,现在我们进行下深入分析。 首先,我们要明确布隆过滤器的几个参数,之前 我们的例子是有一亿的网址要存储,要先建立一个16亿的bit array,然后以每个网址为键值得到8个value值,这里我们就有疑问了,为什么要16亿,为什么要8个value值?那我们不妨把这些都设成未知数,设我们要输入n个元素,生成m个bi
第64步 深度学习图像识别:多分类建模误判病例分析(Pytorch)
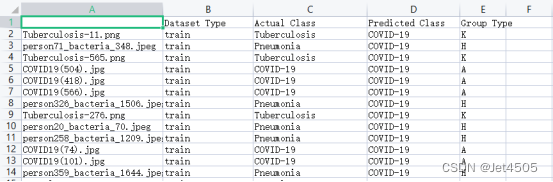
基于WIN10的64位系统演示 一、写在前面 上期我们基于TensorFlow环境介绍了多分类建模的误判病例分析。 本期以健康组、肺结核组、COVID-19组、细菌性(病毒性)肺炎组为数据集,基于Pytorch环境,构建SqueezeNet多分类模型,分析误判病例,因为它建模速度快。 同样,基于GPT-4辅助编程。 二、误判病例分析实战 使用胸片的数据集:肺结核病人和健康人的胸片的

噪声门小信号误判问题
什么是噪声门?下面一段是摘自网络上的解释: Noise Gate Noise Gate 常用于在音频信号处于低电平时,压制能听到而又不想要的噪声。您可以使用它来移除背景噪音、其他信号来源的交扰以及低电平的杂音,同时还有其他用途。 Noise Gate 的工作原理是让门限值音量以上的信号不受阻碍地通过,同时减少低于门限值音量的信号。这可有效移除信号的较低音量声部,同时让所需的音频声部通过。