本文主要是介绍两轮独立驱动电动汽车控制策略。 分为低速和高速两种策略优化分配驱动力矩,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
两轮独立驱动电动汽车控制策略。
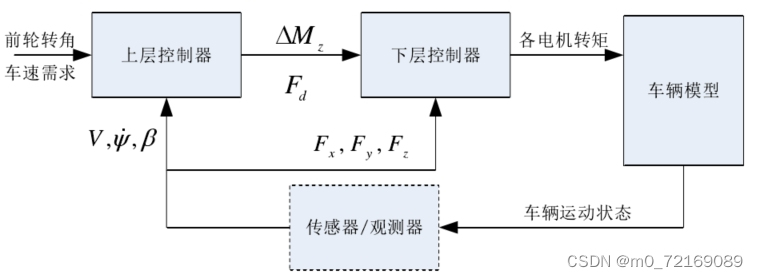
分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层基本模型预测控制计算附加扭矩,下层进行最优分配。
(工程项目线上支持)
路径跟踪,力矩分配,高低速双策略。
carsim和Simulink联合仿真,包含建模说明书。
ID:72150653259325585 Wish守
Wish守
这篇关于两轮独立驱动电动汽车控制策略。 分为低速和高速两种策略优化分配驱动力矩的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



