力矩专题
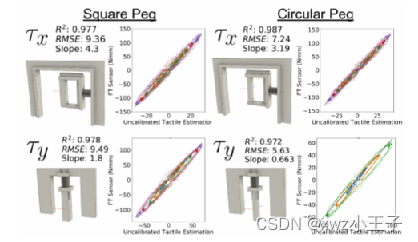
基于电磁激励原理利用视触觉传感器估计抓取力矩的方法
由于触觉感知能使机器人通过其触觉传递获取丰富的接触信息,触觉感知已经成为机器人机械臂的一种流行的感知方式。而在触觉传感器可获取的各种信息中,通过外界接触从抓取物体传递到机器人手指的力矩等信息,在完成各种指令的实现尤为重要。如图所示为通过触点丰富的USB棒插入对齐问题来演示本文所介绍方法。然而,相比于其他传感方式,如力、纹理或滑动识别,触觉力矩估计受到的关注相对较少。 在本文工作中,引入了触觉

EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1.5 ma

EtherCAT主站SOEM -- 20 --Qt-Soem通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 20 --Qt-Soem通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 PS 特别注意1 程序文件修改替换1.1 allvalue.h1.2 motrorcontrol.h1.3 mainwindow.cpp1.4 motrorcontrol.cpp 2

拧紧力矩应该注意什么——SunTorque智能扭矩系统
拧紧力矩是一个非常重要的概念,它是指拧紧螺栓或螺母所需要的扭矩。正确的拧紧力矩可以确保螺栓或螺母紧固程度适中,避免过紧或过松的情况发生,从而保证机械设备的正常运行和安全性。因此,掌握拧紧力矩的计算方法对于机械工程师和操作工人来说都是非常重要的。 拧紧力矩的计算方法有多种,其中最常用的是根据螺栓或螺母的直径、长度、摩擦系数等参数进行计算。但在实际应用中,还需要注意以下几点: 1. 选用合适的拧紧
MATLAB - 计算机械臂关节扭矩以平衡末端力和力矩
系列文章目录 前言 产生力矩以平衡作用在平面机器人末端执行器体上的端点力。要使用各种方法计算关节力矩,请使用刚体树机器人模型的几何雅各比(geometricJacobian)和反动力学(inverseDynamics)对象函数。 一、初始化机器人 双关节刚体树机器人是一个二维平面机器人。关节配置以列向量形式输出。 twoJointRobot = twoJointRigid
Unity 使用AddRelativeTorque 方法给刚体施加力矩详解
Unity 除了使用AddTorque方法(Unity 使用AddTorque方法给刚体施加力矩详解-CSDN博客)给刚体施加力矩,还可以使用AddRelativeTorque方法。 AddTorque方法和AddRelativeTorque在功能上是相似的,都用于在刚体上施加扭矩力。它们的区别在于施加扭矩力的坐标系不同。 AddTorque方法使用世界坐标系来施加扭矩力。这意味着传递给该方
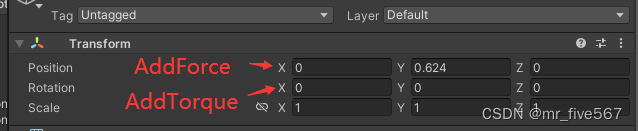
Unity 使用AddTorque方法给刚体施加力矩详解
给刚体施加力,除了使用AddForce方法,我们还可以使用AddTorque方法。该方法是通过施加力矩给刚体以力。AddTorque方法从形式上跟AddForce差不多,它也有4个重载方法: 1、AddTorque(Vector3 torque);使用Vector3类型参数,表示力矩的大小和方向,力矩在刚体的局部坐标系下施加。下面案例rb统一使用变量private Rigidbody rb;
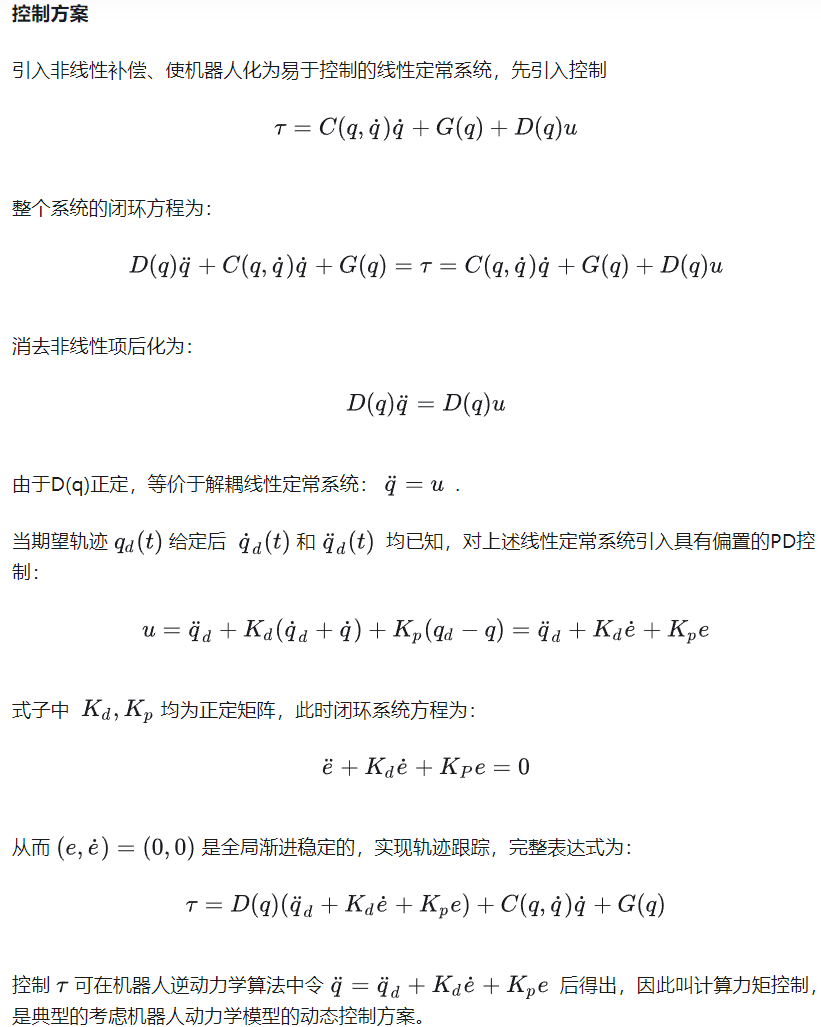
机器人运动控制:摩擦力矩补偿
问题描述 机器人运动控制中,摩擦力矩补偿是一个重要的环节。在机器人动力学模型中,重力和关节摩擦在低速运动时占主导因素,因此对机器人进行重力-摩擦补偿是机器人力控制中被广泛采用的方法。 库伦-粘滞摩擦模型是摩擦力辨识的常用方法,其中摩擦力模型为:τf = fcsgn(q˙) + fv(q˙)。研究人员广泛使用恒速实验来提取关节摩擦力,因为匀速运动时关节惯性力为0,科里奥利力的影响在低速时可以

两轮独立驱动电动汽车控制策略。 分为低速和高速两种策略优化分配驱动力矩
两轮独立驱动电动汽车控制策略。 分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层基本模型预测控制计算附加扭矩,下层进行最优分配。 (工程项目线上支持) 路径跟踪,力矩分配,高低速双策略。 carsim和Simulink联合仿真,包含建模说明书。 ID:72150653259325585Wish守

ansys添加力矩_ansys施加扭矩的两种方法对比.pdf
您所在位置:网站首页 > 海量文档  > 计算机 > 计算机辅助设计 ansys施加扭矩的两种方法对比.pdf5页 本文档一共被下载:次,您可全文免费在线阅读后下载本文档。 下载提示 1.本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。 2.该文档所得收入(下载+内容+预览三)归上传者、原创者。 3.登录后
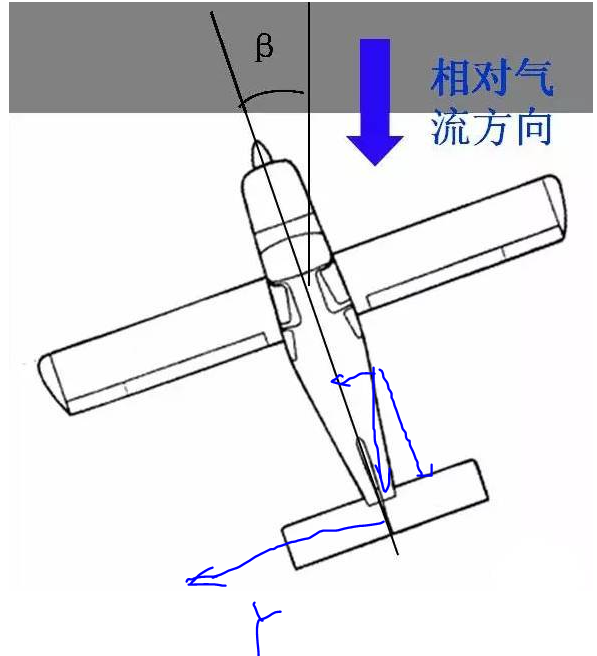
飞机的侧向气动力和力矩
主要研究的内容:(侧向力:滚转和偏航) 1、产生侧力的部件和侧力的计算 2、滚转力矩和偏航力矩的计算 3、滚转静稳定导数和偏航静稳定导数 {还记得的部分: 1、方向舵是朝上还是朝下,决定着是正向力矩还是反向力矩(滚转力矩?) 2、对于来流方向的两次分解,用来确定上反角(下反角)对于滚转力矩的影响 3、除了上反角,还有一个什么角度也是会影响到滚转力矩来着? 4、归一化角速率是啥含义?为何归一化

普通螺纹基本牙型尺寸及拧紧力矩.exe
一、概要 本软件功能主要是通过输入螺纹原始三角形高度P,螺栓规格(公称直径)d,材料的屈服应力σs,计算出公称应力截面积As、外螺纹小径d1、外螺纹小径d2、拧紧力矩T等参数。 开发本软件的原因主要有以下几点: 提高设计效率:通过这款软件,工程师可以快速计算螺纹的基本牙型尺寸和拧紧力矩,减少繁琐的手动计算,提高设计效率。增强设计准确性:该软件基于严谨的数学模型和算法进行计算,
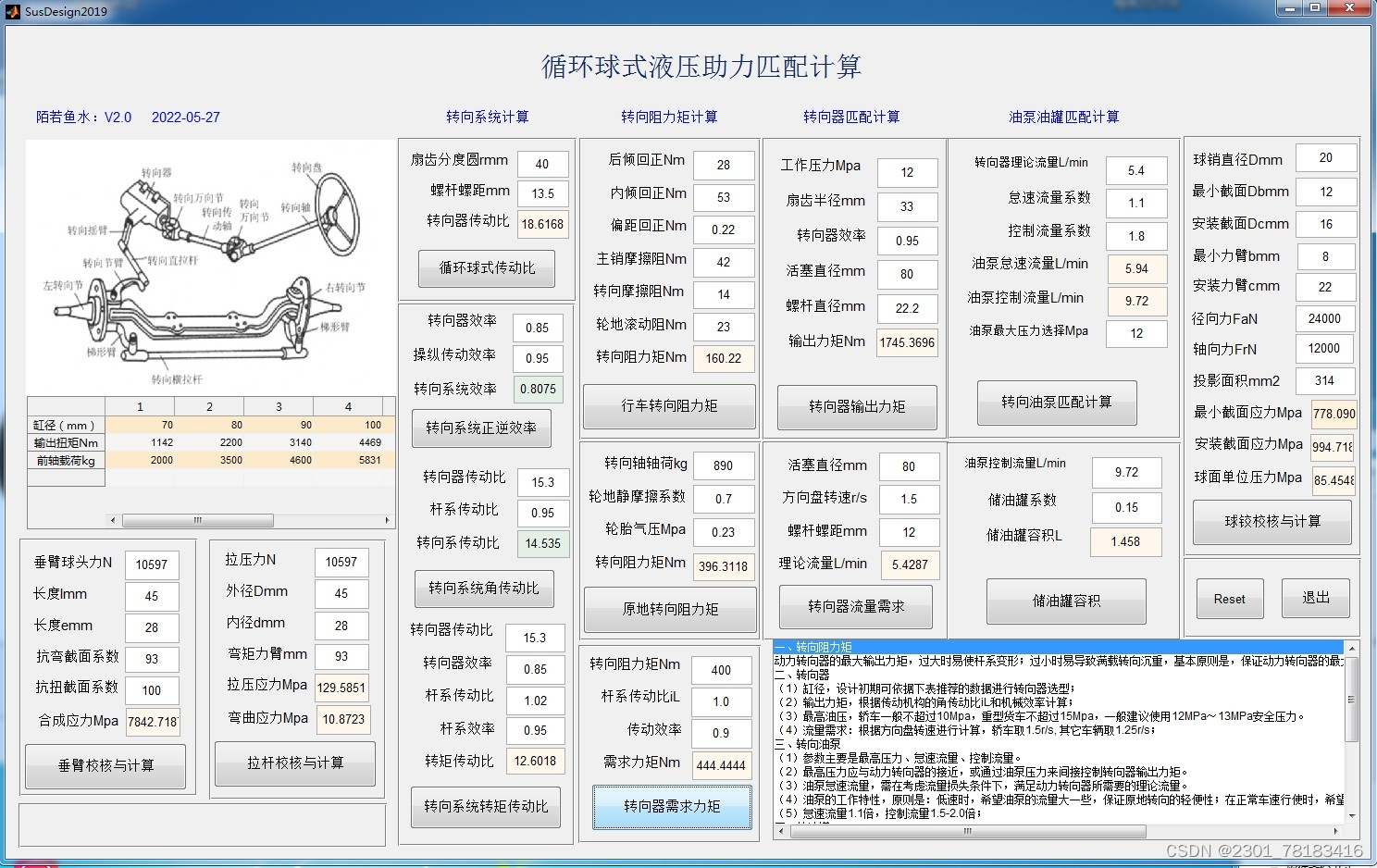
程序名称:转向设计计算程序 阿克曼转角,转弯半径,转向阻力矩,回正力矩,转向主参数,转向传动比,力矩波动
程序名称:转向设计计算程序 开发平台:基于matlab平台 计算内容:阿克曼转角,转弯半径,转向阻力矩,回正力矩,转向主参数,转向传动比,力矩波动,转向梯形,EPS匹配,HPS匹配,齿轮齿条传动比,循环球传动比等计算内容; 适用对象:学习群体、初入行技术人员 特点作用:齿轮齿条EPS和循环球HPS均适用,包含了转向设计中的设计计算,具体请见程序截图 申明提示: 程序主要解决设计计算问题,计算结果均