本文主要是介绍机器人运动控制:摩擦力矩补偿,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
问题描述
机器人运动控制中,摩擦力矩补偿是一个重要的环节。在机器人动力学模型中,重力和关节摩擦在低速运动时占主导因素,因此对机器人进行重力-摩擦补偿是机器人力控制中被广泛采用的方法。
![]()
库伦-粘滞摩擦模型是摩擦力辨识的常用方法,其中摩擦力模型为:τf = fcsgn(q˙) + fv(q˙)。研究人员广泛使用恒速实验来提取关节摩擦力,因为匀速运动时关节惯性力为0,科里奥利力的影响在低速时可以忽略。该方法要求关节以恒定速度顺时针和逆时针移动,并随着速度的变化重复上述运动。
控制方法方面,串联机械臂运动控制有多种方法,比较有代表性的三种:独立关节嵌套双环控制、独立关节嵌套双环加重力/摩擦力补偿控制、计算力矩控制,另外还有拖动示教控制。
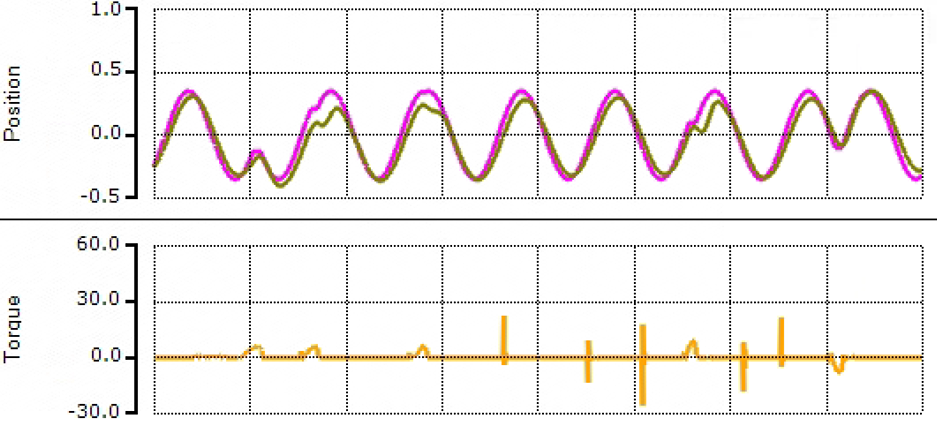
其中,独立关节嵌套双环加重力/摩擦力补偿控制是一种有效的控制方法。在这种方法中,每个关节单独使用两个闭环控制,外面的控制环为关节角度控制环,里面的控制环为关节角速度控制环。同时,通过引入重力、摩擦力等补偿项,对机器人进行精确控制。
![]()
20°sin0.5t=π/9*sin0.5t
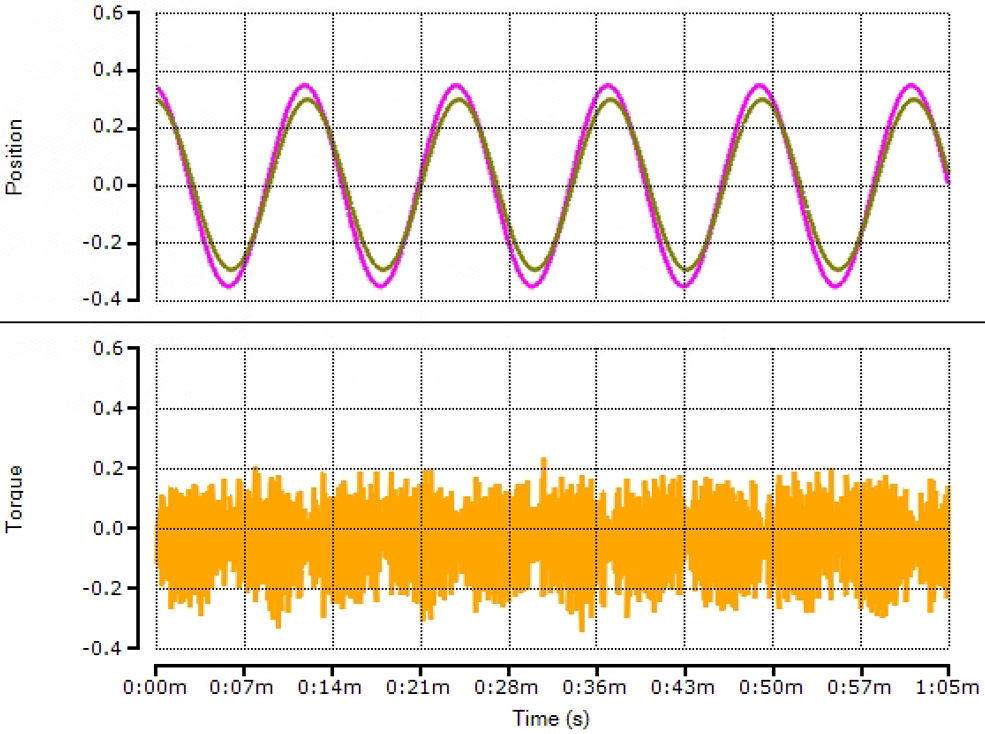
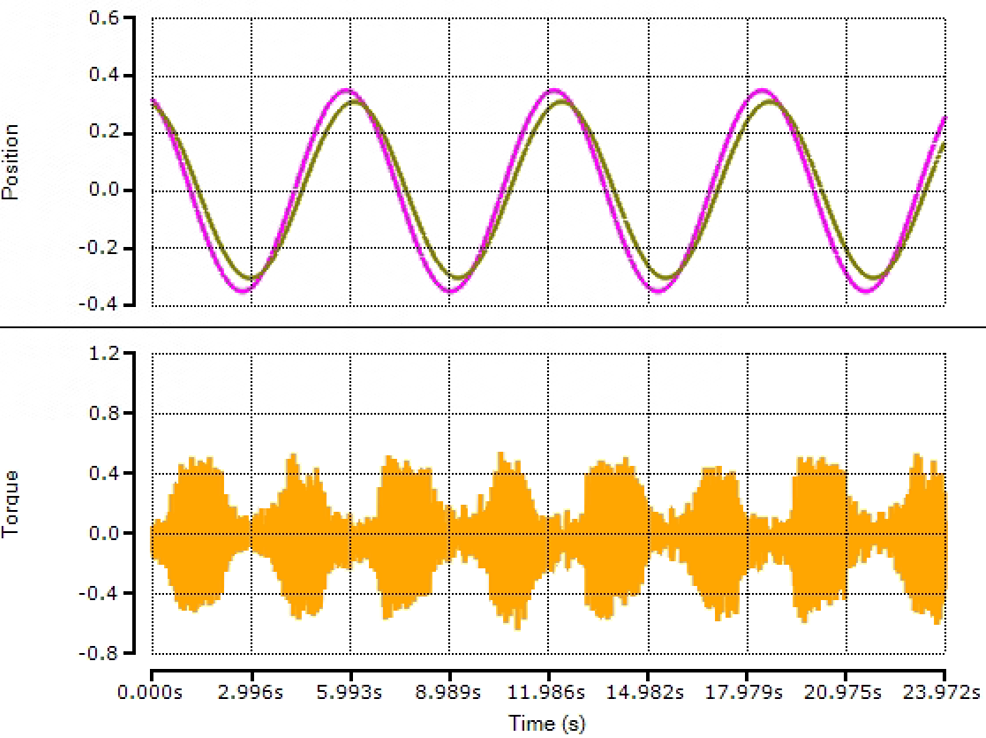
20sin0.5t
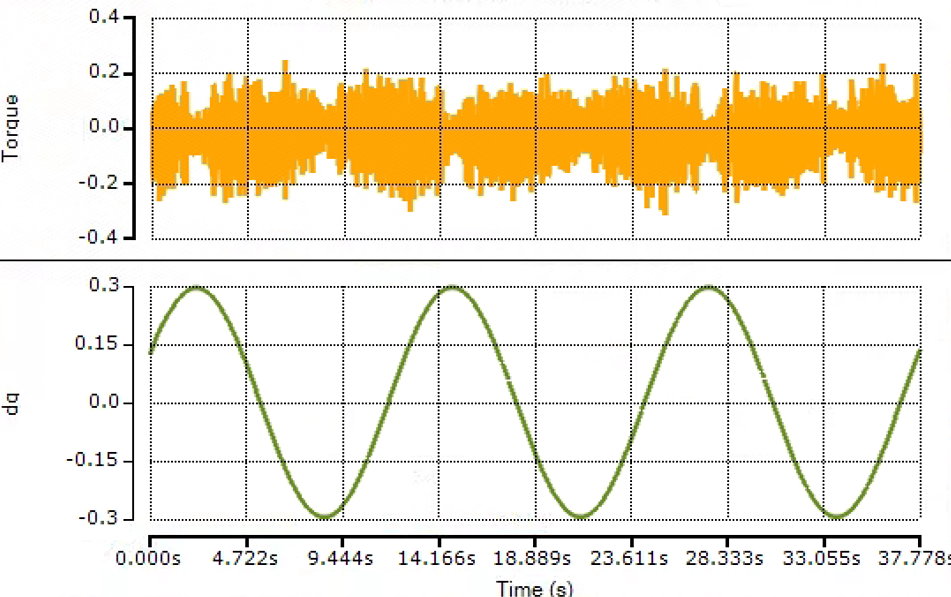
20sint
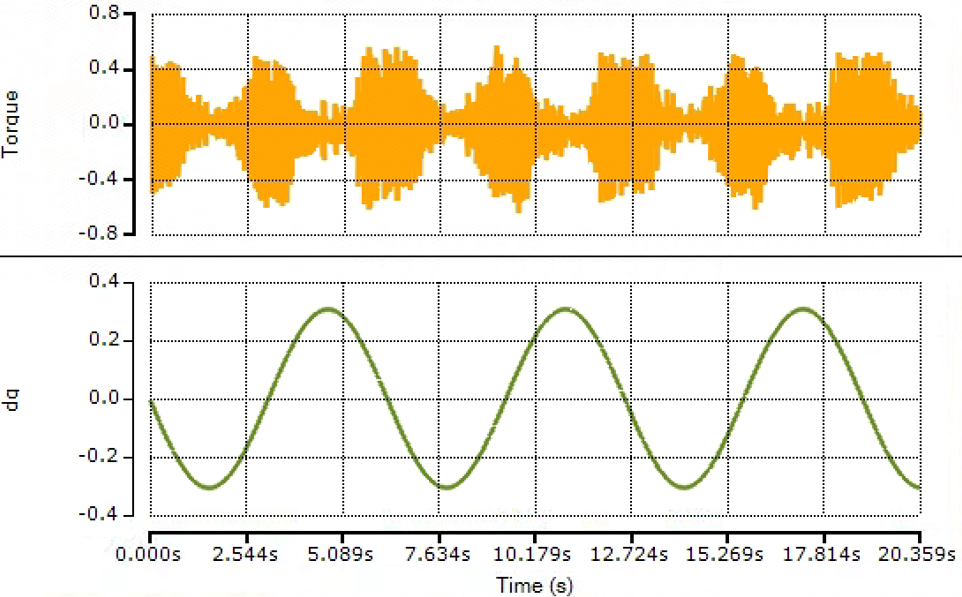

最后再用MATLAB拟合确定参数!!!
参考文献:
工业机器人重力-摩擦力补偿辨识 - 知乎\tau_m=M(q)\ddot{q}+C(q,\dot{q})\dot{q}+G(q)+\tau_f+\tau_{ext} (1)公式(1)为机器人动力学模型,当机器人低速运动时,重力和关节摩擦在模型(1)中占主导因素,因此对机器人进行重力-摩擦补偿是机器人力控制…![]() https://zhuanlan.zhihu.com/p/604255934
https://zhuanlan.zhihu.com/p/604255934
对基于纯电流环下谐波减速器原理的机器人关节的力控性能摸底 - 知乎近几年来以KUKA iiwa为代表的力控机械臂,是以集成力矩传感器的伺服关节作为硬件基础,展现出极佳的整机力控性能,而力矩传感器的引入无疑会增加整机的BOM成本,同时在结构集成、信号处理与运动控制上增加复杂度与…![]() https://zhuanlan.zhihu.com/p/503596500
https://zhuanlan.zhihu.com/p/503596500
这篇关于机器人运动控制:摩擦力矩补偿的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




