低速专题

【报告分享】 中低速物联网业务发展白皮书-中国移动 (附下载)
摘要:近日,伽马数据发布《2020-2021移动游戏IP市场发展报告》,数据显示:2020年IP改编移动游戏收入首次超过千亿元,而核心用户超过1.5亿。2020年《和平精英》《使命召摘要:科技浪潮的席卷下,金融业正在历经前所未有之变革。传统金融被科技激发出新的活摘要:日前,中国电子学会发布《2019中小学机器人教育调研报告》(以下简称《报告》),摘要:11月19日-21日,2020中国移动全球合作
【自动驾驶】针对低速无人车的线控底盘技术
目录 术语定义 一般要求 操纵装置 防护等级 识别代号 技术要求 通过性要求 直线行驶稳定性 环境适应性要求 功能安全要求 信息安全要求 故障处理要求 通信接口 在线升级(OTA) 线控驱
口袋实验室--使用AD2高效调试IIC、UART、SPI等低速接口
目录 1. 简介 2. 调试过程 2.1 简要步骤 2.2 Si5338 寄存器配置流程 2.3 AD2的基本配置 2.4 检查Si5338状态 2.5 配置Si5338寄存器 2.6 保存Si5338寄存器 3. 总结 1. 简介 使用Digilent Analog Discovery 2进行调试不仅提升了工作效率,而且极大地简化了常见低速接口的分析过程。在众多低速

北斗+低速自动驾驶机器人来袭,在线发布会精彩抢先看
北斗+低速自动驾驶机器人来袭,在线发布会精彩抢先看 千寻位置北斗智能市场新品情报局在线沙龙第一期,聚焦低速自动驾驶领域新物种。 3月16日15点在线发布3款北斗+机器人,1款高精度组合导航,覆盖农业、零售、环卫、港口多个场景。 本期在线沙龙邀请了4位优秀的合作伙伴,为我们解答:北斗高精度定位技术如何赋能让这些新物种提高效能、推动变革,在助力构建时空智能城市中成为必不可缺的一环。

先进电机技术 —— 高速电机与低速电机
一、背景 高速电机是指转速远高于一般电机的电动机,通常其转速在每分钟几千转至上万转甚至几十万转以上。这类电机具有功率密度高、响应速度快、输出扭矩大等特点,在航空航天、精密仪器、机器人、电动汽车、高端装备制造等领域有着广泛的应用。 高速电机主要包括高速直流电机、高速永磁电机、高速同步电机、高速无刷电机等多种类型。设计和制造高速电机时,需要考虑材料强度、热稳定性、动平衡性以及轴承寿命等一系列关键问
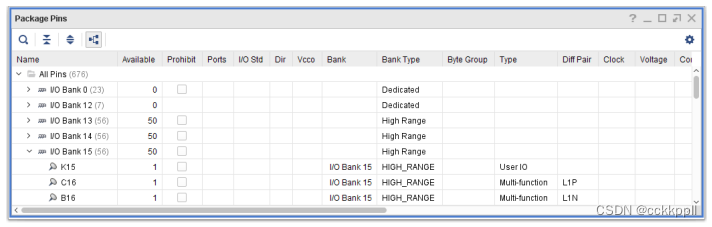
vivado I/O逻辑和低速I/O规划、使用I/O规划视图布局
I/O逻辑和低速I/O规划 您可以在AMD Vivado中使用I/O规划视图布局™ IDE对其进行了阐述、合成,并实现了设计。视图布局同时使用“设备”和“程序包”窗口。附加的I/O信息显示在以下窗口中:时钟资源、时钟区域、封装引脚、,I/O端口、设备约束和属性窗口。Advanced I/O Planner是AMD Versal的新工具™ 允许您放置和在半字节和存储体级别的粒度上移动I/O。低速I

如何区分高速信号和低速信号
如何区分高速信号和低速信号 信号周期频率为Fclock 定义为: Fclock=1/Tclock 信号有效频率为Fknee 定义为: Fknee=0.5/Tr(10%~90%) Tr(10%~90%)为信号的10% ~ 90%上升时间 有效频率也叫转折频率 由数字信号处理的知识可知,现实中的任何信号都是由多个频率分量的正弦波叠加而成的。以方波为例,周期频率为F的理想方波,由频率为F的正弦波以

串行通信的波特率高速和低速区别
注意,这里说的高速、低速不是通常说的速度快就是高速,速度慢就是低速。 这里所谓的高速、低速,指的是同一个波特率因子下的波特率的快慢。 得看一下式子: 高速:波特率=fosc/16*(x+1) (fosc代表外部晶振) 低速:波特率=fosc/64*(x+1) 从上面的公式可以看到,对同一个X,显然用“fosc/16*(x+1) ”计算得到的波特率比用“fosc/64*(x+1) ”得到
车载通信架构 —— 传统车内通信网络LIN总线(低成本覆盖低速场景)
车载通信架构 —— 传统车内通信网络LIN总线(低成本覆盖低速场景) 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。非必要不费力证明自己,无利益不试图说服别人,是精神上的节能减排。 无人问津也好,技不如人也罢,你都要试着安静下来,去做自

两轮独立驱动电动汽车控制策略。 分为低速和高速两种策略优化分配驱动力矩
两轮独立驱动电动汽车控制策略。 分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层基本模型预测控制计算附加扭矩,下层进行最优分配。 (工程项目线上支持) 路径跟踪,力矩分配,高低速双策略。 carsim和Simulink联合仿真,包含建模说明书。 ID:72150653259325585Wish守

一种低速CAN的稳定接线方法:CAN_H通过150Ω电阻下拉接地,CAN_L通过150Ω电阻上拉接5V
接线示意图: 其中7805是电源转换模块,输入9~30v电压,稳定输出5v电压。 问题来源: 经常遇到低速CAN的复测盒,调试时功能是OK的,移交一段时间后,同一批几个盒子之间有差异:同一件产品连接不同的盒子,有的盒子功能正常,有的盒子功能指示灯闪烁,有的盒子完全没有功能; 产品使用CANoe工程分析完全正常,没有问题; 使用调试器连接复测盒在线调试,会发现故障盒子有时收不到CA

图为智盒T609 - 边缘计算盒子 低速无人车专用
2020年是个不平凡的一年,也是边缘计算高速发展的一年。图为科技今年上市了8款边缘计算产品,已广泛应用在人工智能自动化的各个领域。图为科技2010年成立,2106年开始专注研发人工智能边缘计算硬件产品。目前自主研发的产品已在边缘计算领域,获得了不错的市场占有率,每次新品发布都引起市场的高度关注。本次发布的图为T609智盒也是备受市场欢迎,11月份首次发布就获得上千台的预定量。目前已经上市正常销售,

产品级IPMSM高频注入低速无传感器控制方法
前言:姗姗来迟,终于推出了自己的第一篇文章。 大家好,允许自我介绍一下:论坛ID“转子磁场定向”,毕业以来一直在深圳从事电机控制相关工作已十余年。涉及产品包括变频器、伺服、家电控制器、电动工具。做过永磁同步电机PMSM和感应电机ACIM。来到CSDN,希望分享自己的优质内容,和志同道合的朋友共同探讨。 简介:高频注入在国外已研究了很多年,国内的论文也不少,但是国内能够应用到产品的公司寥寥无

高仙机器人获亿元B轮融资 专注于SLAM基础低速小型无人车辆
【TechWeb】3月19日,在高仙机器人2019媒体沟通会上,高仙机器人公布了其亿元级B轮融资,并宣布将在2019年继续开拓物业和无人驾驶领域的业务。 高仙机器人主要围绕商用清洁场景主线,并逐步延伸到产品业务领域。 此前于2018年5月,高仙机器人获得由蓝驰创投领投、七海跟投的A轮千万级美金融资。此轮融资主要用于高仙SLAM 2.0技术的研发和清洁、安防、楼宇配送三条细分垂直领域业务线的持续