本文主要是介绍【MATLAB源码-第62期】基于蜣螂优化算法(DBO)的无人机三维地图路径规划,输出最短路径和适应度曲线。,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
操作环境:
MATLAB 2022a
1、算法描述
蜣螂优化算法(Dung Beetle Optimization, DBO)是一种模拟蜣螂在寻找食物和进行导航的过程的优化算法。蜣螂是一种能够将粪球滚到合适地点的昆虫,它们利用天空中的光线和自身的感知能力来确定方向。这个过程被用作一种优化策略,可以用来解决各种数学和工程问题。下面是蜣螂优化算法的各个步骤的详细描述:
1. 初始化
- 参数设置:设定算法需要的参数,如蜣螂的数量、最大迭代次数、学习因子等。
- 初始解的生成:随机生成一组蜣螂的位置,这些位置代表了潜在的解。
2. 评估
- 适应度计算:根据问题的目标函数,计算每个蜣螂当前位置的适应度值。
3. 寻找最优解
- 个体最优解更新:每个蜣螂根据其历史最优位置和当前位置,更新其个体最优解。
- 全局最优解更新:所有蜣螂中,选择适应度最好的位置作为全局最优解。
4. 更新位置
- 速度和位置更新:根据蜣螂的当前速度、个体最优解和全局最优解,更新蜣螂的速度和位置。这里通常会引入一些随机因素来增加算法的探索能力。
5. 检查边界
- 边界处理:确保蜣螂的新位置在问题定义的可行域内,如果越界则进行调整。
6. 迭代
- 终止条件判断:检查是否满足算法的终止条件,如达到最大迭代次数或解的质量已足够好。
- 返回结果或继续迭代:如果满足终止条件,则输出当前的最优解;如果不满足,返回到步骤2继续迭代。
7. 结果输出
- 输出最优解:将找到的最优解和其对应的适应度值输出。
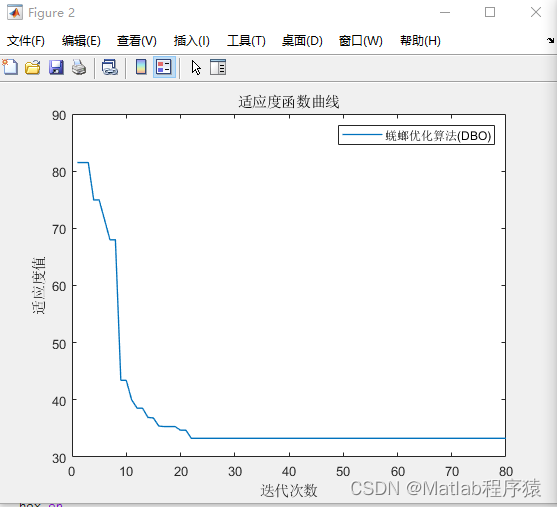
2、仿真结果演示

3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片
这篇关于【MATLAB源码-第62期】基于蜣螂优化算法(DBO)的无人机三维地图路径规划,输出最短路径和适应度曲线。的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








