霍夫专题

Verybot之OpenCV应用二:霍夫变换查找圆
其实我是想通过这个程序来测试一下,OpenCV在Verybot上跑得怎么样,霍夫变换的原理就不多说了,下面是程序: #include "cv.h"#include "highgui.h"#include "stdio.h"int main(int argc, char** argv){cvNamedWindow("vedio",0);CvCapture* capture;i

HALCON-从入门到入门-霍夫识别直线
1.废话 霍夫变换是一种特征检测,被广泛应用在图像分析、计算机视觉以及数位影像处理。霍夫变换是用来辨别找出物件中的特征,例如:线条。他的算法流程大致如下,给定一个物件、要辨别的形状的种类,算法会在参数空间中执行投票来决定物体的形状,而这是由累加空间里的局部最大值来决定。 现在广泛使用的霍夫变换是由RichardDuda和PeterHart在公元1972年发明,并称之为广义霍夫变换,广义霍夫


OpenCV学习(4.13) 霍夫变换
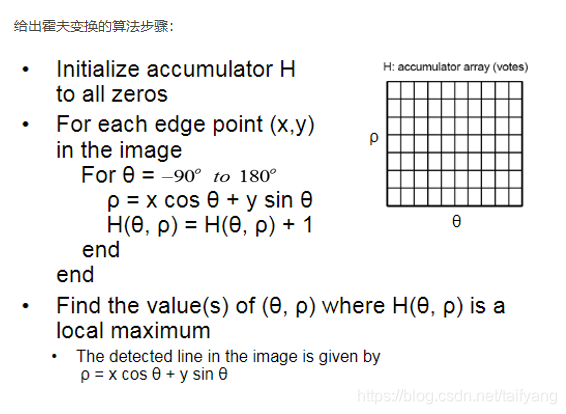
1.霍夫变换 霍夫变换(Hough Transform)是图像处理中的一种技术,主要用于检测图像中的直线、圆或其他形状。它通过将图像空间中的点映射到参数空间来实现,这样,图像空间中在同一直线上的点在参数空间中会形成一条曲线,而这条曲线上的交点对应于图像空间中的直线。 霍夫变换的基本思想是: 对于图像中的每一个边缘点,考虑它可能属于的所有候选直线。对于每一条候选直线,使用霍夫变换算法在参数空间中
图像处理之霍夫变换圆检测算法
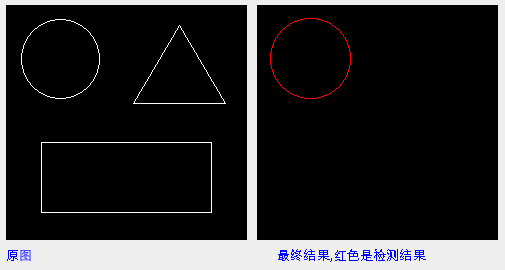
- created by gloomyfish 图像处理之霍夫变换圆检测算法 之前写过一篇文章讲述霍夫变换原理与利用霍夫变换检测直线, 结果发现访问量还是蛮 多,有点超出我的意料,很多人都留言说代码写得不好,没有注释,结构也不是很清晰,所以 我萌发了再写一篇,介绍霍夫变换圆检测算法,同时也尽量的加上详细的注释,介绍代码 结构.让更多的人能够读懂与理解. 一:霍夫变换检测

Python图像处理入门学习——基于霍夫变换的车道线和路沿检测
文章目录 前言一、实验内容与方法二、视频的导入、拆分、合成2.1 视频时长读取2.2 视频的拆分2.3 视频的合成 三、路沿检测3.1 路沿检测算法整体框架3.2 尝试3.3 图像处理->边缘检测(原理)3.4 Canny算子边缘检测(原理)3.5 Canny算子边缘检测(实现)3.5.1 高斯滤波3.5.2 图像转化(彩色->灰度)3.5.3 Canny边缘检测3.5.4 生成Mask掩膜

分水岭算法分割和霍夫变换识别图像中的硬币
首先解释一下第一种分水岭算法: 一、分水岭算法 分水岭算法是一种基于拓扑学的图像分割技术,广泛应用于图像处理和计算机视觉领域。它将图像视为一个拓扑表面,其中亮度值代表高度。算法的目标是通过模拟雨水从山顶流到山谷的过程,将图像分割成若干独立的区域。 分水岭算法的步骤和原理: 距离变换: 首先对图像进行预处理,将图像转化为灰度图,并进行二值化处理(如Otsu算法)。对二值图像应用距离变换,计
霍夫变换的基本理解(第八天)
千万注意:使用opencv自带的霍夫API HoughLinesP():此函数输入的是一个二进制且八位的图像,例如:你不能用cvtcolor()变换之后直接输入。 HoughCircles():此函数输入的是一个灰度且八位的图像,例如:你不能经过threshold()、findcontours()等之后的图像进行输入。 我现在还不知道经过二值化的图像怎么转化为灰度图。。。。会了再补充。 ---

学习c++版opencv3.4之22-霍夫圆检测
霍夫圆检测。 从直角坐标系转为极坐标系后圆心比较亮。 #include <opencv2/opencv.hpp>#include <iostream>#include <math.h>using namespace std;using namespace cv;Mat src, dst;Mat gray_img;int main(){// Mat src1;//

学习c++版opencv3.4之21-霍夫直线检测
霍夫变换用来直线,圆等检测,使用的前提条件是边缘检测(如canny,sobel等)已经完成。 #include <opencv2/opencv.hpp>#include <iostream>#include <math.h>using namespace std;using namespace cv;Mat src, dst;int main(){Mat src1;src1 =

车道线检测霍夫直线检测原理分析
http://blog.csdn.net/happy_stars_2016/article/details/52691255 一、车道线检测步骤 1、灰度化 灰度化关键函数: cvCvtColorcvCvtColor(IplImage* src, IplImage* dst, CV_BRG2GRAY); 最后一个参数为 CV_BRG2GRAY ,表示将BRG图片(彩色图片)

PCL 霍夫变换探测三维直线
文章目录 一、简介1.1二维空间1.2三维空间 二、实现代码三、实现效果参考文献 一、简介 1.1二维空间 “Hough变换”(HT)算法最初作为美国专利所发布,是一种定位任何形状的通用方法,该方法最早被应用于二维图像领域之中,但其仍适用于在二维、三维点集探测各种形状。 基础理论:在二维空间中, 每一个点在笛卡尔坐标系中都有一个明确的二维坐标 ( x , y ) (

灰度变换、自适应高斯滤波、平滑滤波、canny边缘检测、直线霍夫变换
这是我第一次写博客,主要是记录自己的学习历程,帮助像我这样的新学者提供一点点思路。 我用的opencv版本是2.4.9 和 vs2010 版本比较旧。 这里面主要有灰度变换、自适应高斯滤波、平滑滤波、canny边缘检测、直线霍夫变换,还有一个旋转变换没有实验,里面还有Mat和IplImage图像转换。 #include "stdafx.h"#include <opencv2/opencv.
OpenCV 实现霍夫圆变换
返回:OpenCV系列文章目录(持续更新中......) 上一篇:OpenCV实现霍夫变换 下一篇 :OpenCV系列文章目录(持续更新中......) 目标 在本教程中,您将学习如何: 使用 OpenCV 函数 HoughCircles()检测图像中的圆圈。 理论 Hough 圆变换 Hough Circle 变换的工作方式与上一教程中介绍的 Hough Line 变换大致相
OpenCV实现霍夫变换
返回:OpenCV系列文章目录(持续更新中......) 上一篇:OpenCV 如何实现边缘检测器 下一篇 :OpenCV 实现霍夫圆变换 目标 在本教程中,您将学习如何: 使用 OpenCV 函数 HoughLines()和 HoughLinesP()检测图像中的线条。注:由于输入法问题按Q替代进行角度说明。 理论 注意 下面的解释属于 Bradski 和 Kaehler
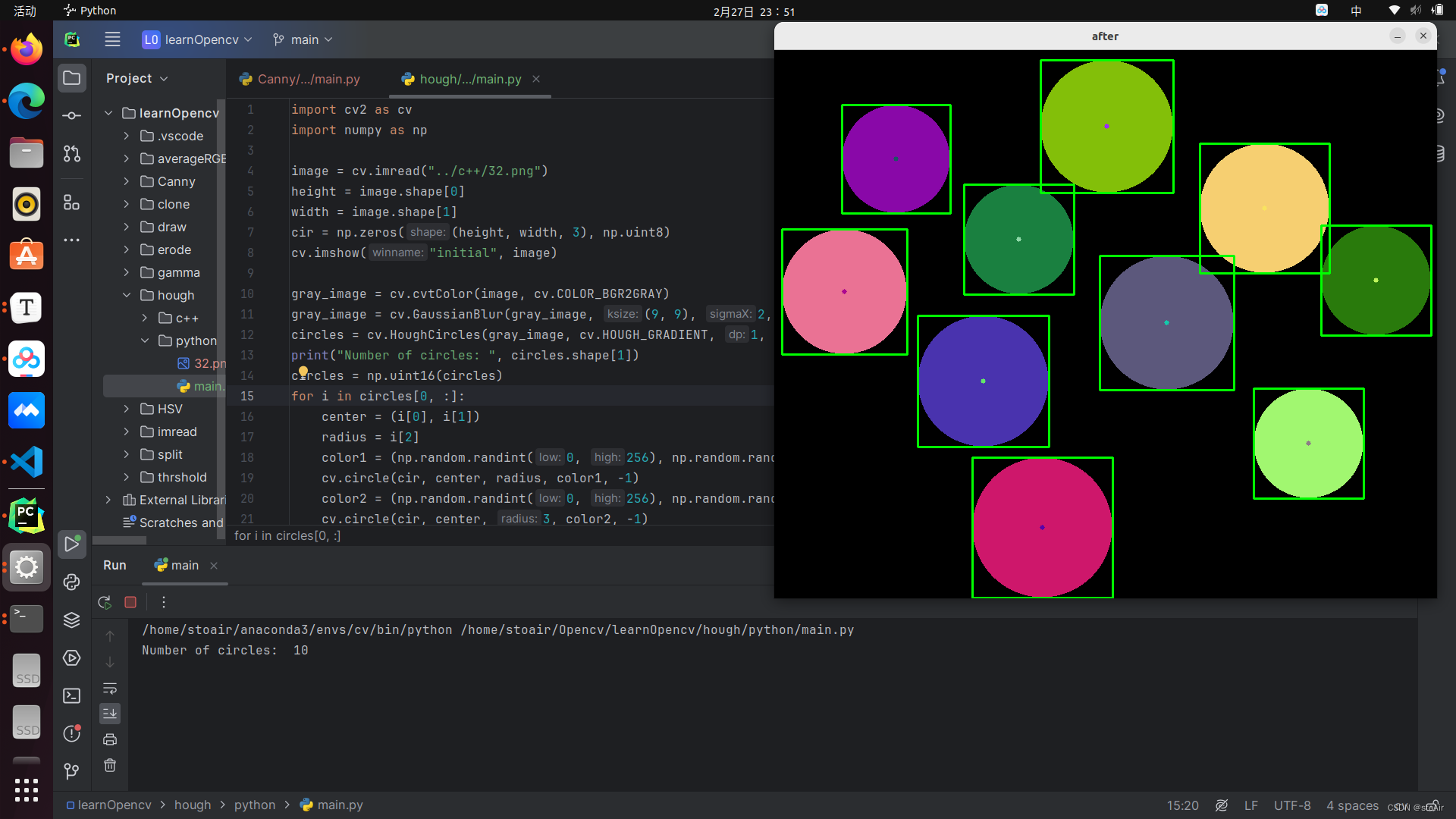
![[C#]OpenCvSharp使用HoughCircles霍夫圆检测算法找出圆位置并计数](https://img-blog.csdnimg.cn/direct/add91c38b75849d4aeb7478c4403c7b9.png)
[C#]OpenCvSharp使用HoughCircles霍夫圆检测算法找出圆位置并计数
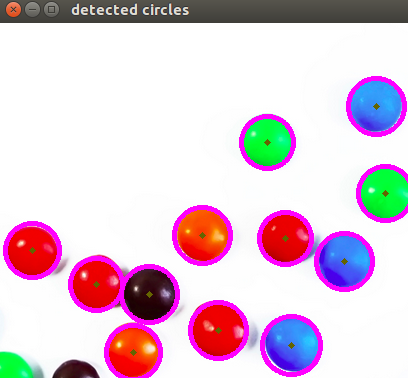
【效果展示】 原图: 找出位置: 【测试环境】 vs2019,netframework4.7.2,opencvsharp4.8.0 【函数用法】 cv2提供了一种圆检测的方法:HoughCircles。该函数的返回结果与参数设置有很大的关系。 检测的图像时9枚钱币,分别使用了阈值(大津法和三角法)、均值偏移滤波以及未处理图像。实验的结果是只要调整param1和param2两个参
《数字图像处理》-上机 5 图像阈值化处理、霍夫变换及形态学算法
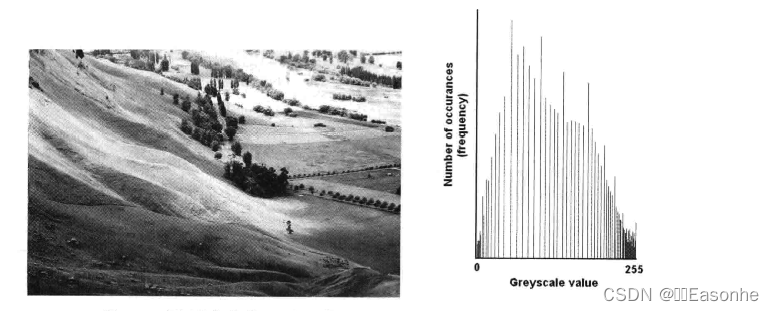
一、上机目的 学习图像阈值化处理、霍夫变换、形态学算法及编程实现方法 二、相关知识及练习 1、图像阈值化处理 图像阈值化(Binarization)旨在剔除掉图像中一些低于或高于一定值的像素,从而提 取图像中的物体,将图像的背景和噪声区分开来。 灰度化处理后的图像中,每个像素都只有一个灰度值,其大小表示明暗程度。阈值化处 理可以将图像中的像素划分为两类颜色,常见的阈值化算法如公式所示: 当

计算机视觉——边缘检测与霍夫变换
目的: 了解OpenCV中canny边缘检测函数的用法,并选取图像进行测试,观察阈值对结果的影响。 实现基于霍夫变换的图像圆检测(边缘检测可以用opencv的canny函数)。 一.Canny边缘检测 1.实验目的:了解OpenCV中canny边缘检测函数的用法,并选取图像进行测试,观察阈值对结果的影响。 2.Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级

python使用canny和sobel算子联合检测自定义源码解决批量处理瓶盖图片霍夫变换源码实战
python使用canny和sobel算子联合检测自定义源码解决批量处理瓶盖图片霍夫变换源码实战 源码解说很清楚的哦。 函数1:jiance.py #!/usr/bin/env python # -*- coding:utf-8 -*-# Author's_name_is_NIKOLA_SSimport cv2import numpy as npfrom canny import
HoughLines霍夫变换实现
原理: 实现: /*** @description: 霍夫变换* @param edge 输入边缘* @param lines 检测直线* @param threshold 阈值*/void houghlines(cv::Mat& edge, std::vector<cv::Vec2f>& lines, int threshold){cv::Mat H = cv::Mat::zeros
【计算机视觉】图像变换方法(边缘检测算子、霍夫变换、重映射、放射变换与直方图均衡化)
来源:《OpenCV3编程入门》,怀念毛星云大佬🕯️ 说明:本系列重点关注各种图像变换方法的原理、作用和对比 图像变换 图像变换(imagetransfrom),即将一幅图像转变成图像数据的另一种表现形式。变换最常见的例子就是傅里叶变换(Fouriertransform),即将图像转换成源图像数据的另一种表示形式。这类操作的结果仍然保存为OpenCV图像结构的形式,但是新图像的每个单独像素表

c++ 利用霍夫变换实现对图片中圆的检测
#include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;int main(){Mat src = imread("d://VC项目//img9.jpg");if (!src.data){printf("图片路径不存在!");}//中值滤波Mat media_img,gray_i

8.霍夫变换:线条——投票原理、霍夫空间、线的极坐标表示_2
目录 投票原理 霍夫空间 线的极坐标表示 投票原理 就像我之前说的,检查每一行是不可能的,即使是一台非常非常快的电脑。 我们要做的是让数据告诉我们,让数据决定线在哪里。 因为这是民主,我们该怎么办? 我们要做的是投票。 因此,投票是一种通用的技术,我们让特性投票给所有与之兼容的模型。 它的工作方式很简单: 1、循环遍历所有特征(特征指的是小的边缘点),每次为模型参
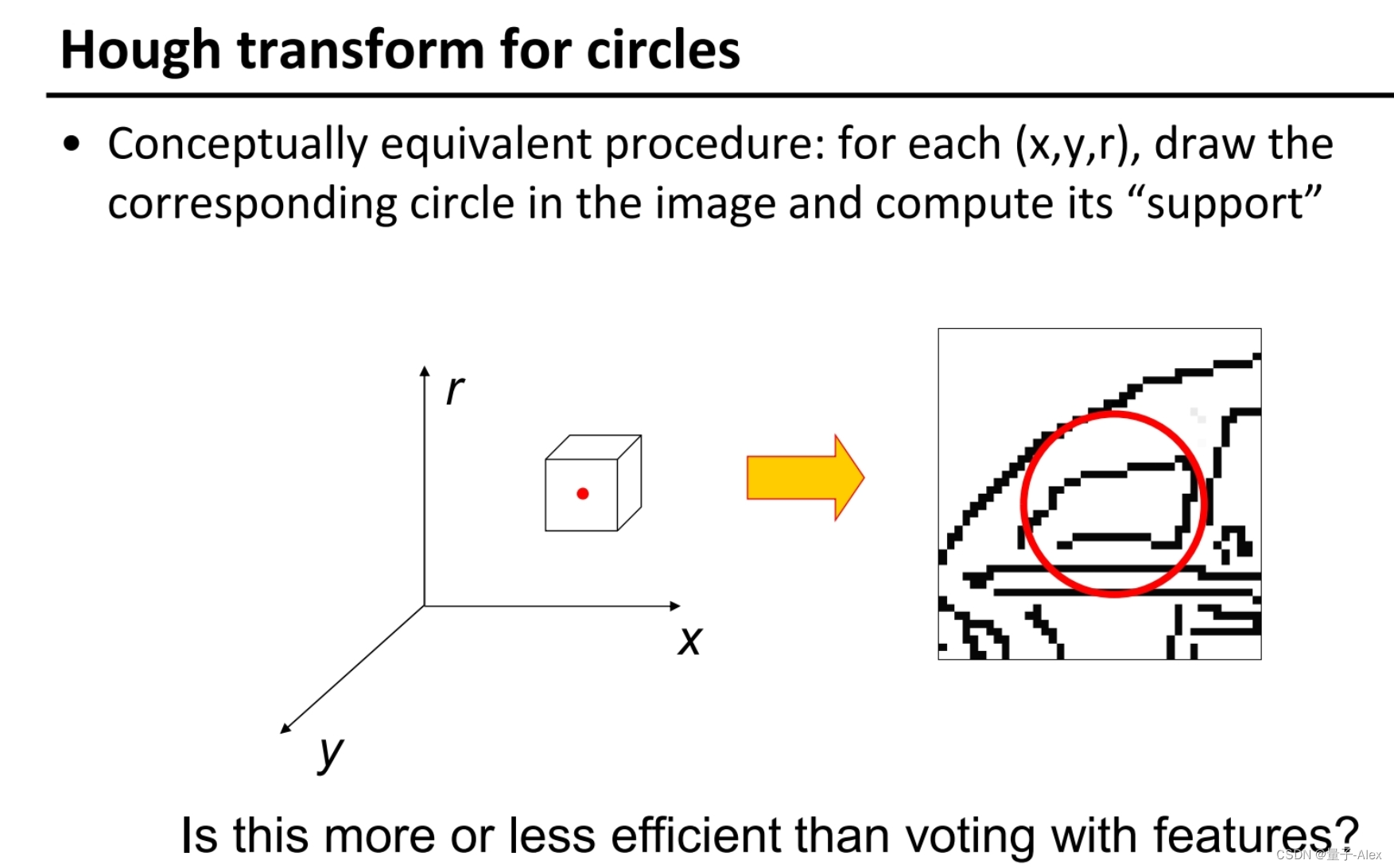
9.霍夫变换:圆——介绍、用Hough检测圆、圆的Hough变换_1
目录 介绍 用Hough检测圆 圆的Hough变换 介绍 画好直线之后,记住,线是参数模型最简单的形式,现在我们来看看更复杂的东西,也就是圆。 这是圆的方程,其中 a 和 b 是中心,r 是半径: 现在我们假设半径已知。我们只需要找到这些点的位置。 这里有一个圆,在这个圆上有三个点,这里的蓝点: 那么,霍夫空间是什么呢? 因为通常有三个未知数,a b r,但是我告诉
Opencv实战(3)详解霍夫变换
霍夫变换 Opencv实战系列指路前文: Opencv(1)读取与图像操作 Opencv(2)绘图与图像操作 文章目录 霍夫变换1.霍夫线变换1.1 原理1.2 HoughLines() 2.霍夫圆变换2.1 原理2.2 HoughCircles() 最基本的霍夫变换是从黑白图像中检测直线(线段) 霍夫变换(Hough Transform)是图像处理中的一种特征提取技术,
【北邮鲁鹏老师计算机视觉课程笔记】05 Hough 霍夫变换
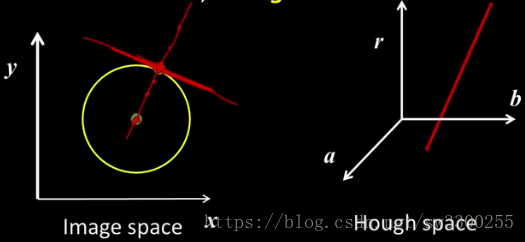
【北邮鲁鹏老师计算机视觉课程笔记】05 Hough 霍夫变换 1 投票策略 考虑到外点率太高 ①让直线上的每一点投票 ②希望噪声点不要给具体的任何模型投票,即噪声点不会有一致性的答案 ③即使被遮挡了,也能把直线找出来 参数空间离散化 直线相当于就是m,b两个参数 点给参数空间投票 找到投票最多的参数点 给参数空间投票 上图,图像空间的一条直线在参数空间是一个点 上图:图