采摘专题
助力樱桃智能自动化采摘,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建果园种植采摘场景下樱桃成熟度智能检测识别系统
随着科技的飞速发展,人工智能(AI)技术已经渗透到我们生活的方方面面,从智能家居到自动驾驶,再到医疗健康,其影响力无处不在。然而,当我们把目光转向中国的农业领域时,一个令人惊讶的事实映入眼帘——在这片广袤的土地上,农业生产仍然大量依赖人力,而非智能机械化。与此同时,国外的农业生产模式早已进入全面机械化的新时代。面对这一现状,我们不禁要思考:如何将AI技术融入农业,引领农业生产走向数字化、智能化?
助力草莓智能自动化采摘,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建果园种植采摘场景下草莓成熟度智能检测识别系统
随着科技的飞速发展,人工智能(AI)技术已经渗透到我们生活的方方面面,从智能家居到自动驾驶,再到医疗健康,其影响力无处不在。然而,当我们把目光转向中国的农业领域时,一个令人惊讶的事实映入眼帘——在这片广袤的土地上,农业生产仍然大量依赖人力,而非智能机械化。与此同时,国外的农业生产模式早已进入全面机械化的新时代。面对这一现状,我们不禁要思考:如何将AI技术融入农业,引领农业生产走向数字化、智能化?

ICRA 2024:北京工业大学马楠教授联合中科原动力公司推出番茄采摘自主机器人AHPPEBot,实现32.46秒快速准确采摘
当前,农业生产正深受劳动力短缺困扰,这一现状对生产规模的进一步拓展构成了严重制约。为了突破这一瓶颈,实施自动化已成为提升农业生产力的关键途径,这也使得机器人采收技术备受关注。 现今的机器人采收系统普遍采用先进感知方法,并结合精密收获程序来完成作业。具体而言,它们借助监督学习技术,精准地将作物成熟度划分为可收获与不可收获两类。在检测完毕后,系统会利用分割模型捕捉目标作物的点云数据,进而拟合出球
2004NOIP普及组真题 2. 花生采摘
线上OJ: 【04NOIP普及组】花生采摘 核心思想: 1、本题为贪心即可。 2、因为本题严格限制了顺序,所以先把每个节点的花生数量按降序排序。然后逐一判断下一个花生是否需要去采摘即可 3、每一次采摘完,记录耗时 t 以及采集的花生总数 ans。同时考虑排序后的下一个节点,如果采摘后返回路边时间足够,则执行下一次采摘;如果采摘后来不及返回路边,则不再进行下一次采摘,本次直接返回路边即可。

【NOIP2004PJ】花生采摘
目录 前言题目概述输入输出样例输入样例输出思路瞎BB思路 代码 前言 光阴似箭,日月如梭。大家好,我盛艺承又双叒叕回来了!今天给大家讲一讲NOIP2004的题目,花生采摘。 题目概述 鲁宾逊先生有一只宠物猴,名叫多多。这天,他们两个正沿着乡间小路散步,突然发现路边的告示牌上贴着一张小小的纸条:“欢迎免费品尝我种的花生!”。 鲁宾逊先生和多多都很开心,因为花生正是他们的最爱。

AI助力农作物自动采摘,基于YOLOv3全系列【yolov3tiny/yolov3/yolov3spp】参数模型开发构建作物生产场景下番茄采摘检测计数分析系统
去年十一那会无意间刷到一个视频展示的就是德国机械收割机非常高效自动化地24小时不间断地在超广阔的土地上采摘各种作物,专家设计出来了很多用于采摘不同农作物的大型机械,看着非常震撼,但是我们国内农业的发展还是相对比较滞后的,小的时候拔草是一个人一列蹲在地里就在那埋头拔草,不知道什么时候才能走到地的尽头,小块的分散的土地太多基本上都是只能人工手工来取收割,大点的连片的土地可以用收割机来收割,不过收割机基
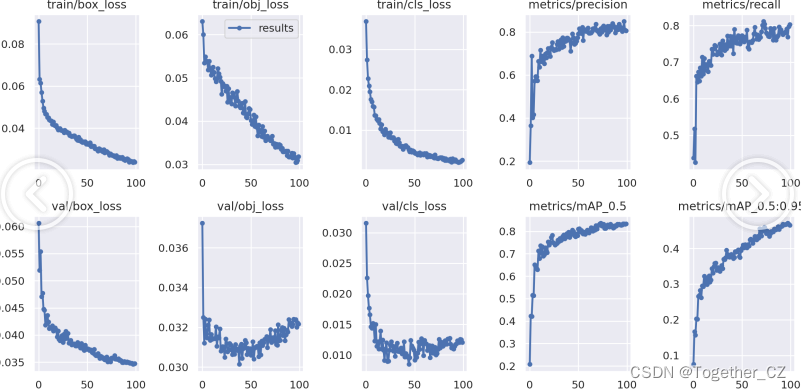
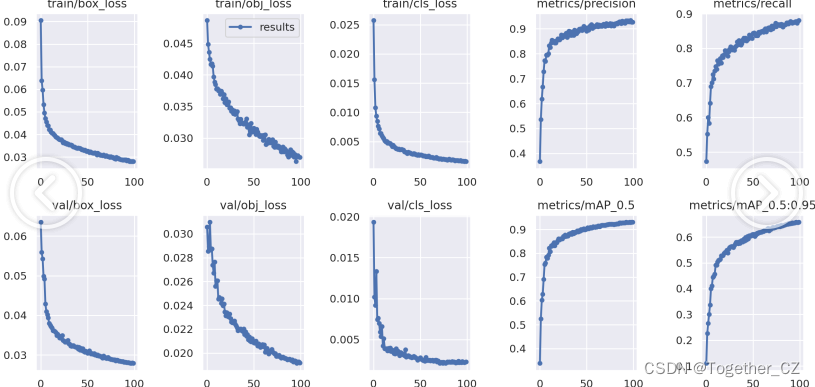
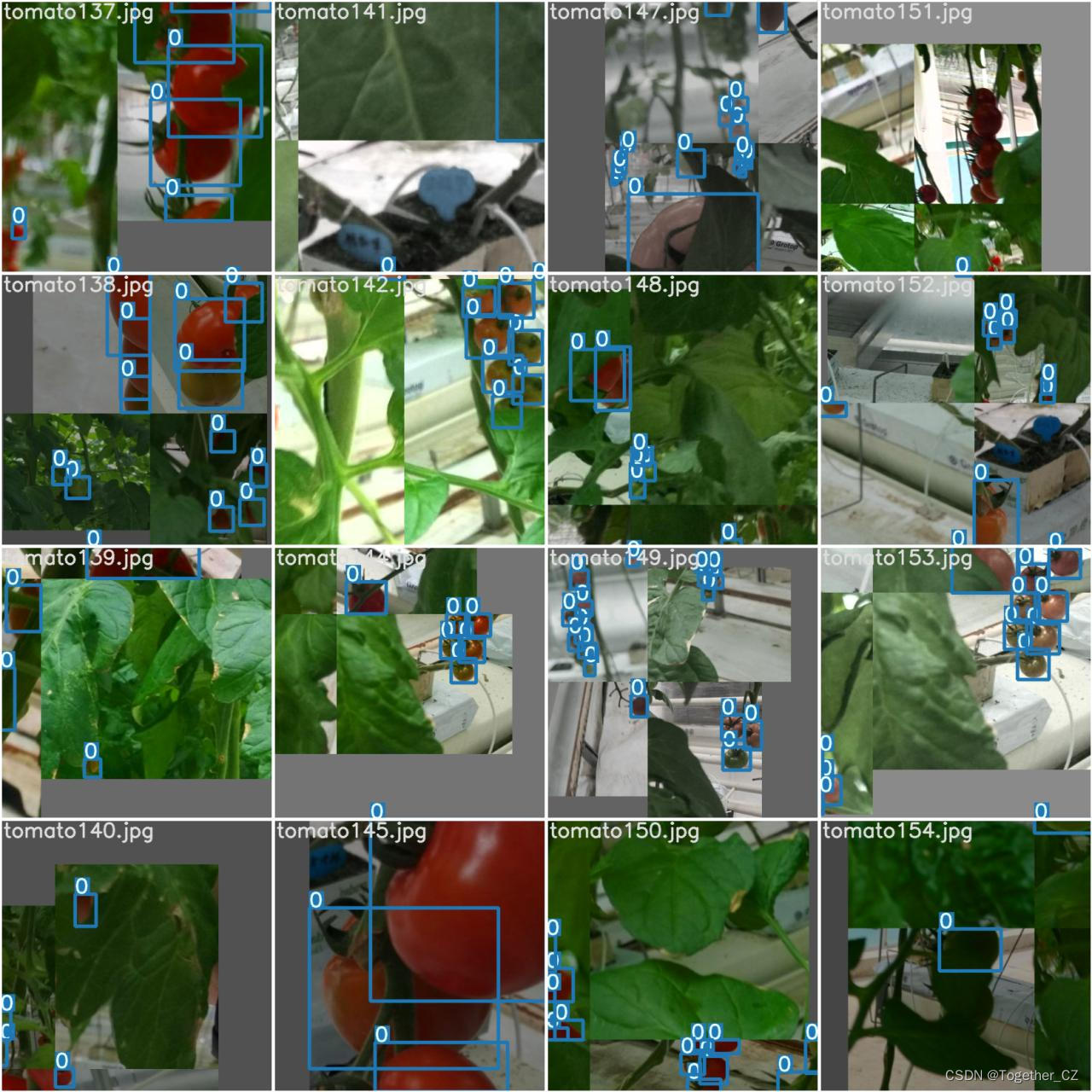
AI助力农作物自动采摘,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建作物生产场景下番茄采摘检测计数分析系统
去年十一那会无意间刷到一个视频展示的就是德国机械收割机非常高效自动化地24小时不间断地在超广阔的土地上采摘各种作物,专家设计出来了很多用于采摘不同农作物的大型机械,看着非常震撼,但是我们国内农业的发展还是相对比较滞后的,小的时候拔草是一个人一列蹲在地里就在那埋头拔草,不知道什么时候才能走到地的尽头,小块的分散的土地太多基本上都是只能人工手工来取收割,大点的连片的土地可以用收割机来收割,不过收割机基
1072: 花生采摘
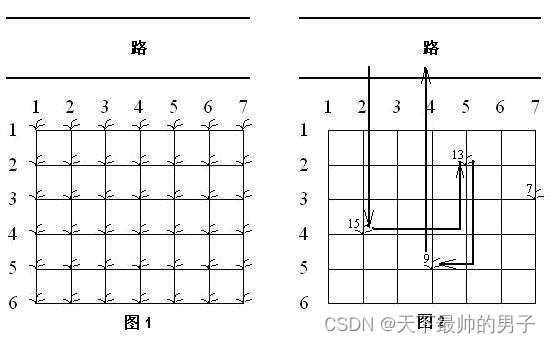
Description 鲁宾逊先生有一只宠物猴,名叫多多。这天,他们两个正沿着乡间小路散步,突然发现路边的告示牌上贴着一张小小的纸条:“欢迎免费品尝我种的花生!——熊字”。 鲁宾逊先生和多多都很开心,因为花生正是他们的最爱。在告示牌背后,路边真的有一块花生田,花生植株整齐地排列成矩形网格(如图1)。有经验的多多一眼就能看出,每棵花生植株下的花生有多少。为了训练多多的算术,鲁宾逊先生说:“你先找

基于OpenCV+CNN+IOT+微信小程序智能果实采摘指导系统——深度学习算法应用(含python、JS工程源码)+数据集+模型(二)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Jupyter Notebook环境Pycharm 环境微信开发者工具OneNET云平台 相关其它博客工程源代码下载其它资料下载 前言 本项目基于Keras框架,引入CNN进行模型训练,采用Dropout梯度下降算法,按比例丢弃部分神经元,同时利用IOT及微信小程序实现自动化远程
基于OpenCV+CNN+IOT+微信小程序智能果实采摘指导系统——深度学习算法应用(含python、JS工程源码)+数据集+模型(二)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Jupyter Notebook环境Pycharm 环境微信开发者工具OneNET云平台 相关其它博客工程源代码下载其它资料下载 前言 本项目基于Keras框架,引入CNN进行模型训练,采用Dropout梯度下降算法,按比例丢弃部分神经元,同时利用IOT及微信小程序实现自动化远程
基于OpenCV+CNN+IOT+微信小程序智能果实采摘指导系统——深度学习算法应用(含python、JS工程源码)+数据集+模型(四)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Jupyter Notebook环境Pycharm 环境微信开发者工具OneNET云平台 模块实现1. 数据预处理2. 创建模型并编译3. 模型训练及保存1)模型训练2)模型保存 4. 上传结果1)图片拍摄2)模型导入及调用3)数据上传OneNET云平台(1)图片信息上传(2)预测结果上传 相关

基于OpenCV+CNN+IOT+微信小程序智能果实采摘指导系统——深度学习算法应用(含pytho、JS工程源码)+数据集+模型(五)
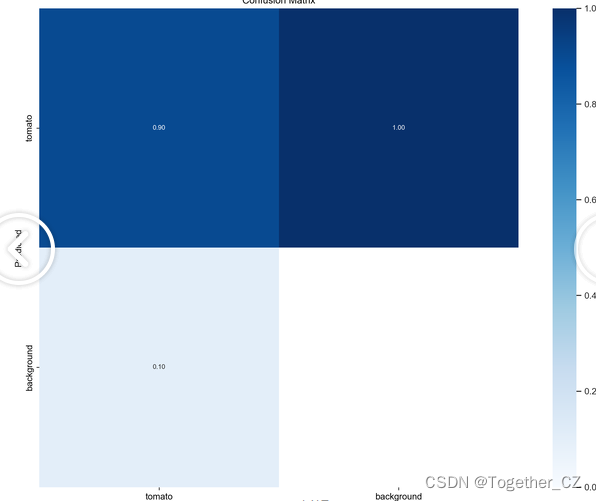
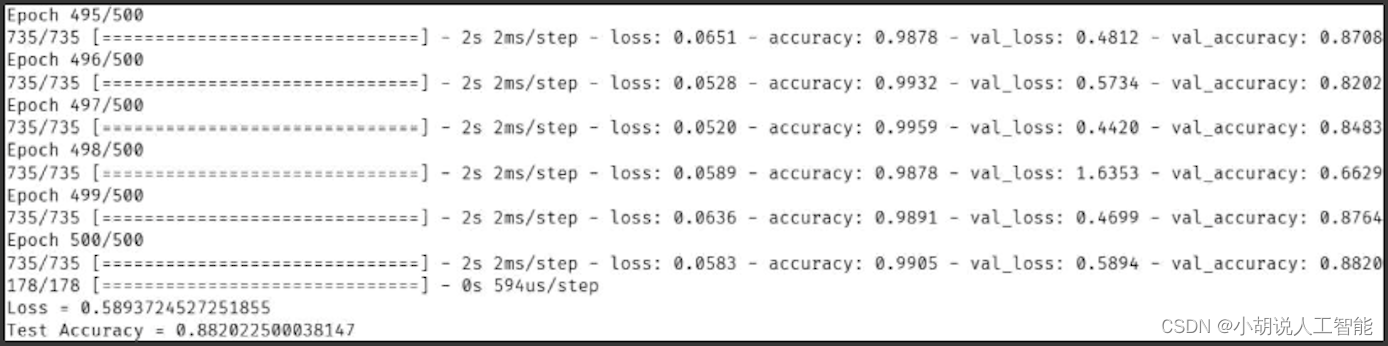
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Jupyter Notebook环境Pycharm 环境微信开发者工具OneNET云平台 模块实现1. 数据预处理2. 创建模型并编译3. 模型训练及保存4. 上传结果5. 小程序开发1)查询图片2)查询识别结果 系统测试1. 训练准确率2. 测试效果3. 外部访问效果 相关其它博客工程源代码下载
基于OpenCV+CNN+IOT+微信小程序智能果实采摘指导系统——深度学习算法应用(含pytho、JS工程源码)+数据集+模型(四)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Jupyter Notebook环境Pycharm 环境微信开发者工具OneNET云平台 模块实现1. 数据预处理2. 创建模型并编译3. 模型训练及保存1)模型训练2)模型保存 4. 上传结果1)图片拍摄2)模型导入及调用3)数据上传OneNET云平台(1)图片信息上传(2)预测结果上传 相关
基于OpenCV+CNN+IOT+微信小程序智能果实采摘指导系统——深度学习算法应用(含pytho、JS工程源码)+数据集+模型(二)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Jupyter Notebook环境Pycharm 环境微信开发者工具OneNET云平台 相关其它博客工程源代码下载其它资料下载 前言 本项目基于Keras框架,引入CNN进行模型训练,采用Dropout梯度下降算法,按比例丢弃部分神经元,同时利用IOT及微信小程序实现自动化远程
基于PLC的采摘机械手系统(论文+源码)
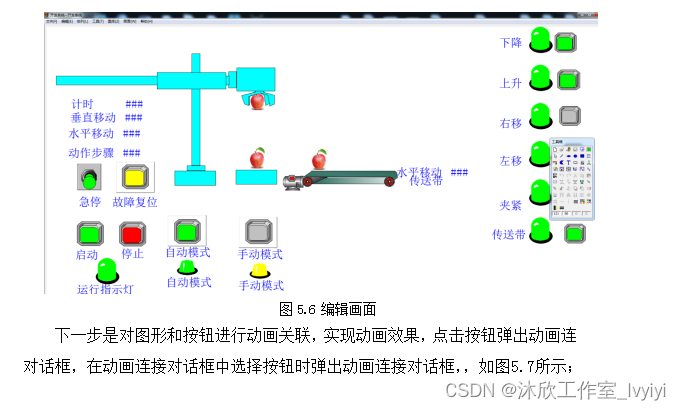
1.系统设计 本次设计围绕基于PLC的采摘机械手系统进行设计, PLC即可编程控制器其是一种常见的微处理器,本次拟采用西门子是S7-200 PLC,一方面对整个设计从器件选型到I/O分配,图纸绘制等进行设计,另一方面还通过组态王仿真软件进行仿真验证。通过仿真测试,本次设计的采摘采摘机械手在步进电机驱动下可以完成对采摘机械手在搬运过程中的下降、夹紧、上升、右旋、下降等全过程自动化控制,对后来学者具
2023年亚太杯数学建模A题水果采摘机器人的图像识别功能(matlab 部分代码)
对于1-4问针对的是附录1 中的数据 clc;close all;clear;% 图像文件夹路径folder_path = 'E:/新建文件夹/yatai/Attachment/Attachment 1/';% 图像文件列表image_files = dir(fullfile(folder_path, '*.jpg')); % 假设所有图片都是jpg格式% 解析文件名中的数字,并转换

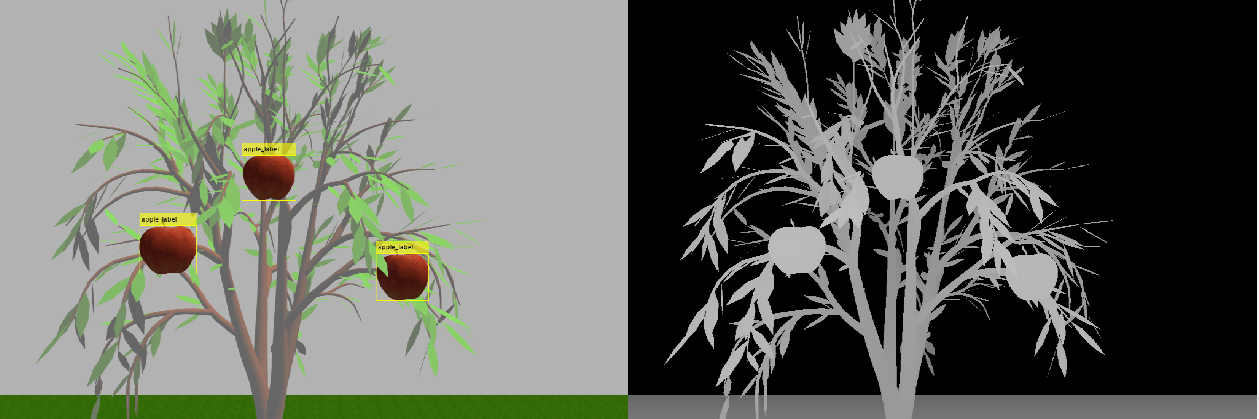
2023年亚太杯数学建模A题水果采摘机器人的图像识别功能(基于yolov5的苹果分割)
注:.题中附录并没有给出苹果的标签集,所以需要我们自己通过前4问得到训练的标签集,采用的是yolov5 7.0 版本,该版本带分割功能 一:关于数据集的制作: clc;close all;clear;%-----这个是生成yolov5 数据集的--------% 图像文件夹路径folder_path = 'E:/新建文件夹/yatai/Attachment/Apple/';
2023年亚太杯数学建模A题水果采摘机器人的图像识别功能(matlab 部分代码)
对于1-4问针对的是附录1 中的数据 clc;close all;clear;% 图像文件夹路径folder_path = 'E:/新建文件夹/yatai/Attachment/Attachment 1/';% 图像文件列表image_files = dir(fullfile(folder_path, '*.jpg')); % 假设所有图片都是jpg格式% 解析文件名中的数字,并转换
2023年亚太杯数学建模A题水果采摘机器人的图像识别功能(免费思路)
中国是世界上最大的苹果生产国,年产量约为 3500 万吨。同时,中国也是世界上最大的苹果出口国,世界上每两个苹果中就有一个出口到国。世界上每两个苹果中就有一个来自中国,中国出口的苹果占全球出口量的六分之一以上。来自中国。中国提出了 "一带一路 "倡议(BRI),这是构建全球社会、共享未来的重要支柱。 中国提出了 "一带一路 "倡议(BRI),这是建设具有共同未来的全球社会的重要支柱。得益于这一倡

2023年亚太数学建模大赛--A题(水果采摘机器人的图像识别功能)
中国是世界上最大的苹果生产国,年产量约为 3500 万吨。同时,中国也是世界上最大的苹果出口国,世界上每两个苹果中就有一个出口到国。世界上每两个苹果中就有一个来自中国,中国出口的苹果占全球出口量的六分之一以上。来自中国。中国提出了 "一带一路 "倡议(BRI),这是构建全球社会、共享未来的重要支柱。 中国提出了 "一带一路 "倡议(BRI),这是建设具有共同未来的全球社会的重要支柱。得益于这一倡

全球对挪威草莓采摘机器人的兴趣
“草莓采摘机器人”可以全天工作,很快就会取代季节性工人。根据挪威种植者Simen Myhrene的说法,这就是未来:“它不需要午休或任何东西。当然,降低工资成本很有趣。 Myhrene在挪威环境与生命科学大学展示了机器人:“对于园艺行业来说,这是一场革命,可以与挤奶机器人进入牛舍相提并论。市场的增长正在被进口草莓所取代,所以现在我们必须证明挪威草莓可以在市场上竞争。 来自世界各地的

基于视觉识别的果蔬自动采摘机器人设计 ——LW文档
摘 要 目前的果蔬采摘基本上都是依赖于人工作业而导致劳动力成本高、劳动强度大,而现有的采摘机器人的研究基本上都是停留在理论层面,而极个别物化的成果都是基于计算机,从而导致系统体积过大、功耗高和成本高。为解决以上问题,本文提出并开发了一套基于视觉识别的果蔬采摘机器人。 本文的主要设计内容包括基于视觉识别的采摘机器人系统的方案设计、各个硬件电路的设计、以及基于汇编语言、VC++三种编程语言的软件设
MATLAB - Gazebo 联合仿真 —— 使用 UR10 机械臂检测和采摘水果
系列文章目录 文章目录 系列文章目录前言一、设置 Gazebo 仿真环境二、在 Gazebo 中模拟和控制机器人2.1 概述2.2 任务调度器2.3 感知和目标生成系统2.4 运动规划2.5 机械臂和关节控制系统 三、分配用于控制机器人的参数3.1 定义机器人模型和运动规划参数,3.2 定义机械手姿势和摄像机参数3.3 配置 Gazebo 协同仿真设置3.4 定义夹具控制设置 4. S
小韦老师@NOIP 普及组-2004-花生采摘
小韦老师@NOIP 普及组-2004-花生采摘 题目: 描述 鲁宾逊先生有一只宠物猴,名叫多多。这天,他们两个正沿着乡间小路散步,突然发现路边的告示牌上贴着一张小小的纸条:“欢迎免费品尝我种的花生!――熊字”。 鲁宾逊先生和多多都很开心,因为花生正是他们的最爱。在告示牌背后,路边真的有一块花生田,花生植株整齐地排列成矩形网格(如图1)。有经验的多多一眼就能看出,每棵花生植株下的花生有多少。

花生采摘c语言编程答案,c语言贪心算法智力大冲浪与花生采摘两题
满意答案 HWL0302 2014.08.13 采纳率:49% 等级:10 已帮助:322人 都是用C++写的,不建议只用纯C语言 #include #include #include using namespace std; struct Riddle { int time; int money; }; struct gt{ bool operator()(Riddle& op