谭平专题
![【课程笔记】谭平计算机视觉(Computer Vision)[5]:反射和光照 - Reflectance Lighting](https://i-blog.csdnimg.cn/blog_migrate/605975d30e1d112f02269197ccfca1e1.png)
【课程笔记】谭平计算机视觉(Computer Vision)[5]:反射和光照 - Reflectance Lighting
课程链接(5-1): 课程链接(5-2): radiance的影响因素(辐射强度) 光源 材质、反射 局部形状 反射 计算机视觉中主要考虑反射 BRDF(Bi-directional reflectance distribution function) BRDF假设(local assumption):反射只和此点接收到的光有关,忽略了半透明、荧光等 这个假设导致依靠BRDF模型建立的人皮
![【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR](https://i-blog.csdnimg.cn/blog_migrate/7972a564ea1c037d7366163813d67ddb.png)
【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR
视频地址链接 预备知识 radiance:单位面积单位时间单位方向角发出去的能量 irradiance:单位:功率/平方米;单位面积单位时间接收的能量 ISP: image signal processor 白平衡:人眼会自动滤过白炽灯、日光灯、节能灯下对物体的附加颜色,然而相机没有此功能,因此相机具有矫正功能。 vignetting:对于白墙拍照,一般是中间亮周边暗。边缘上光线散开的效果,

港科大谭平团队突破3D生成领域关键性问题
来源:机器之心 生成模型在图像生成领域取得了巨大的成功,但将这一技术扩展到 3D 领域一直面临着重重挑战。典型的多头怪问题,即文本生成3D中多视角一致性问题,一直得不到很好的解决。谭平团队最新的研究论文都致力于解决这一基础问题,为这一领域带来了突破和创新。 谭平博士是香港科技大学电子与计算机工程系教授。他曾经担任阿里巴巴达摩院XR实验室负责人,人工智能实验室计算机视觉首席科学家。于近期创立公司光

浙江大学谭平计算机视觉SLAM课程上课笔记:04反射和光照(对应B站P5,P6)
4.反射和光照 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 radience是发光的 意思,一个像素值被一下几个方面决定:光源(方向和光强):点光源,方向光源物体的材料反射属性局部的形状(主要是局部的朝向)各种各样

Vision Course(谭平)学习笔记
目录 Course1 & 2 Introduction and CameraCourse 3 ColorRadiometric Calibration and HDR特别说明 浙江大学教授谭平计算机视觉学习笔记分享 Course1 & 2 Introduction and Camera Course 3 Color Radiometric Calibration

浙江大学谭平计算机视觉SLAM课程上课笔记:02颜色(对应B站P3)
2.Color颜色 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 1.人如何感知颜色:视网膜上三种视锥细胞(红绿蓝) 2. 还有柱状细胞 也是感受光线。在昏暗的时候可以感受光线。所以极光肉眼看其实很难看,并没有照片中的美感。

浙江大学谭平计算机视觉SLAM课程上课笔记:05滤波器(对应B站P7)
5.滤波器 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 逐渐进入图像处理的部分。 用一个领域的平均像素来替换中心像素 一个是高斯filter,一个是Box filter 空域不变,Box Filter是最简单的。高斯的F

谭平老师-SLAM课程要点记录-SLAM
内容链接地址 bilibili视频链接 ppt链接,提取码: gk29 LiDAR SLAM 2D LiDAR的结构 2D雷达只能表示一个平面上的东西,如果有上下坡就无法表示。 地图的表示 占据栅格地图: 另外还有灰色的,表示unknown。 位姿估计 ICP:例如 X = { x 1 , x 2 , x 3 , . . . , x n } X=\{x_{1},x_{2},x_
![【课程笔记】谭平计算机视觉(Computer Vision)[2]:相机 - Camera](https://img-blog.csdnimg.cn/2019082900110835.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[2]:相机 - Camera
视频链接:https://v.youku.com/v_show/id_XNDA5Mzg2ODc5Ng==.html?spm=a2hzp.8253869.0.0 文中截图也来自视频 相机结构及参数 相机的小孔成像(针孔相机) 丢失了距离信息场景中的角度信息平行线相交长度改变 真实相机(有镜头,并非针孔) 孔太大,会造成模糊;孔太小,光线进入较少,需较长的曝光时间故使用棱镜(凸透镜)聚
谭平老师-SLAM课程要点记录-SfM
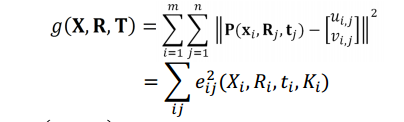
内容链接地址 bilibili视频链接 ppt链接,提取码: gk29 Structure‐from‐Motion Structure = 3D点云 Motion = 相机位置和姿态 SFM = 运动中的相机恢复出整个场景 SfM的输入与输出 输入:带有关联特征的图像(特征检测和匹配已经做得很好了), p i , j = ( u i , j , v i , j ) p_{i,j}=(u_

谭平老师课——相机模型
RANSAC:选出最大的inlier的集合。 做模型拟合离不开这个算法。(RANSAC为Random Sample Consensus的缩写,它是根据一组包含异常数据的样本数据集,计算出数据的数学模型参数,得到有效样本数据的算法。它于1981年由Fischler和Bolles最先提出) 思想:随机挑最少的点去拟合,然后评价这次拟合的怎么样 选出投票数最多的模型,选出符合这个模型的点为inlier

教授专栏87 | 谭平: 突破3D生成领域关键性问题
文 / 谭平教授 生成模型在图像生成领域取得了巨大的成功,但将这一技术扩展到 3D 领域一直面临着重重挑战。典型的多头怪问题,即文本生成3D中多视角一致性问题,一直得不到很好的解决。本研究团队最新的研究论文都致力于解决这一基础问题,为这一领域带来了突破和创新。 论文原文地址:https://arxiv.org/abs/2310.03602 团队和腾讯、华南理工共同合作的SweetDreamer
![【课程笔记】谭平计算机视觉(Computer Vision)[3]:颜色 - color](https://img-blog.csdnimg.cn/20190903215100760.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[3]:颜色 - color
视频链接:https://v.youku.com/v_show/id_XNDA5OTY0ODAwNA==.html?spm=a2h0j.11185381.listitem_page1.5!28~A 人怎样感知颜色 光谱上能量分布,人的感知 人体有三种锥形Cones细胞感知红绿蓝光; 还有一种柱形Rods细胞,在黑暗情况下更容易感知光。 (也就是极光在相机下很漂亮,而人眼在暗光下很难看出颜
![【课程笔记】谭平计算机视觉(Computer Vision)[6]:过滤器 - Filter](https://img-blog.csdnimg.cn/20191012201320587.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[6]:过滤器 - Filter
课程链接(6): 过滤器 图像过滤器 软阴影(soft shadow)的制作 将字做高斯模糊,然后通过一个平移就可出现软阴影效果边缘提取(Detecting edges) Edge就是跳跃的地方 但实际上,噪声的影响很大,因此要滤波 求梯度也是一种滤波(都是核不同而已) 非极大值抑制(使提取的边更细) 高斯滤波 高斯滤波去掉了噪声,但是阶跃也变得平滑模糊 双边滤波 增加了另一个域(
![【课程笔记】谭平计算机视觉(Computer Vision)[5]:反射和光照 - Reflectance Lighting](https://img-blog.csdnimg.cn/20191008233407874.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[5]:反射和光照 - Reflectance Lighting
课程链接(5-1): 课程链接(5-2): radiance的影响因素(辐射强度) 光源 材质、反射 局部形状 反射 计算机视觉中主要考虑反射 BRDF(Bi-directional reflectance distribution function) BRDF假设(local assumption):反射只和此点接收到的光有关,忽略了半透明、荧光等 这个假设导致依靠BRDF模型建立的人皮

浙江大学谭平计算机视觉SLAM课程上课笔记:03辐射度标定-HDR(对应B站P4)
3.辐射度标定-HDR 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 声明:本笔记仅为当堂记录的笔记,有些东西不对或者是没有逻辑,仅仅是按照PPT的顺序罗列为方便复习。 光的强度是如何转化为一个像素值的。 像素42是怎么来的 Radiance: 单位面积单位时间接受到的能量 Irradiance: 单位面积单位时间单位空间角接
![【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR](https://img-blog.csdnimg.cn/20190920221816625.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[4]:辐射校准高动态范围图像 - Radiometric Calibration HDR
视频地址链接 预备知识 radiance:单位面积单位时间单位方向角发出去的能量 irradiance:单位:功率/平方米;单位面积单位时间接收的能量 ISP: image signal processor 白平衡:人眼会自动滤过白炽灯、日光灯、节能灯下对物体的附加颜色,然而相机没有此功能,因此相机具有矫正功能。 vignetting:对于白墙拍照,一般是中间亮周边暗。边缘上光线散开的效果,
![【课程笔记】谭平计算机视觉(Computer Vision)[7]:交互式分割图形切割 - Interactive Segmentation Graph-Cut](https://img-blog.csdnimg.cn/20200107223831509.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTMyMzU1ODI=,size_16,color_FFFFFF,t_70)
【课程笔记】谭平计算机视觉(Computer Vision)[7]:交互式分割图形切割 - Interactive Segmentation Graph-Cut
课程链接(7): Semi-automated Segmentation 从图片中切割某个区域 – 相近的颜色 – 与背景颜色差异大 图片网格化 主要方法是用网格来表示图片 把image当做graph来对待 把分割看为二分类问题——前景和背景问题 定义label来进行cost最优化 寻找一个赋值,使得cost最小,即为最优分割,这就是求解目标 Max Flow & Min cut