本文主要是介绍【课程笔记】谭平计算机视觉(Computer Vision)[2]:相机 - Camera,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
视频链接:https://v.youku.com/v_show/id_XNDA5Mzg2ODc5Ng==.html?spm=a2hzp.8253869.0.0
文中截图也来自视频
相机结构及参数
相机的小孔成像(针孔相机)
- 丢失了距离信息
- 场景中的角度信息
- 平行线相交
- 长度改变
真实相机(有镜头,并非针孔)
- 孔太大,会造成模糊;孔太小,光线进入较少,需较长的曝光时间
- 故使用棱镜(凸透镜)聚光
- 使用镜头,也会造成散光
透镜方程:
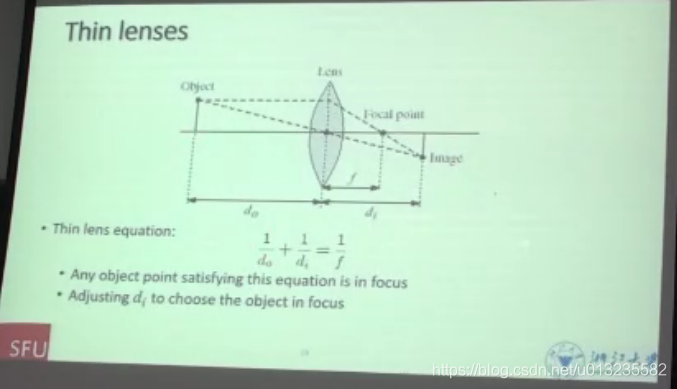
手机摄像头通过调整df的大小从而改变d0的大小,因此可以改变聚焦物体的远景。
景深问题:
- 因为透镜的存在,使得只有在特定范围内的物体才是清晰地。即距离镜头很近、很远的物体都是模糊的。
光圈
- 使用小光圈能够让景深更大,更广阔的距离物体更清晰;使用大光圈造成背景虚化的效果目前受到很多摄影者的喜爱)
- 小光圈需要长时间曝光(获得等量的光通量);但对于运动物体,曝光时间长,会造成运动模糊(对于流水线条感的拍摄,部分摄影师追求的效果)
视野(Field of View-Zoom)
- 长镜头,视野变小,远处物体更清晰(所以望远镜镜头都很长)
- 视野与镜头的换算关系式
 - FOV对物体几何形状的影响
- FOV对物体几何形状的影响
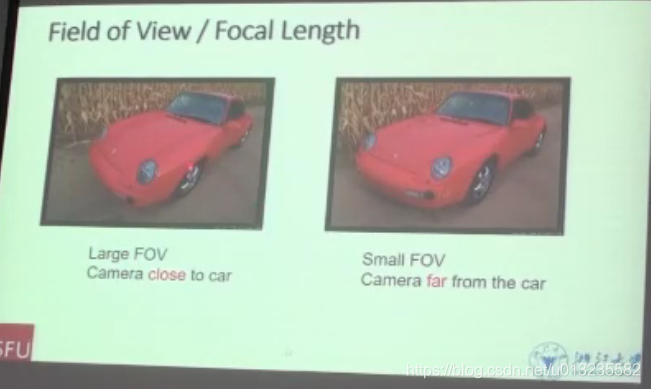
–大FOV:近大远小;平行线相交(比较明显)
相机中部分问题
- 色差
– 光是混合的,波长的差异会使得不同颜色的光的聚点不同;(所以手机边缘会出现彩色光线) - 镜头畸变
– 有凹进(枕形)去也有凸出(桶形)的变形;
部分研究
- Accidental pinhole and pinspeck cameras: Revealing the scene outside the picture, CVPR 2012


通过遮挡物的孔径来形成图片(两个场景图像做差) - Lensless Imaging with a Controllable Aperture, CVPR 2006

– LCD透明度的控制,达到针孔相机效果,实现不连续的FOV
这篇关于【课程笔记】谭平计算机视觉(Computer Vision)[2]:相机 - Camera的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








