本文主要是介绍谭平老师课——相机模型,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
RANSAC:选出最大的inlier的集合。 做模型拟合离不开这个算法。(RANSAC为Random Sample Consensus的缩写,它是根据一组包含异常数据的样本数据集,计算出数据的数学模型参数,得到有效样本数据的算法。它于1981年由Fischler和Bolles最先提出)
思想:随机挑最少的点去拟合,然后评价这次拟合的怎么样
选出投票数最多的模型,选出符合这个模型的点为inliers,但是模型不是最后的模型
假定:inliers互相之间是一致的;outliers得到的模型互相不一致(不团结)
理论上不能处理outlliers数超过50%的,且外点比较团结的情况
概率:希望某次挑出来的最小拟合点正好都是inliers,有个公式能得到需要迭代多少次
拟合模型用的样本点越少(8点法,4点法等),算法越稳定,因为可以容忍更大比例的outliers
注意:迭代过程中可以动态的估计外点的比例(先假设为50%),因为每次随机采样后评估这个模型的时候,
就可以得到外点和内点,这时真正的的内点比例肯定大于等于这次的。(比例用于设定迭代的次数)
第10章 几何和相机模型
齐次坐标:定义线、点、点和线的关系
有齐次坐标后点和线的关系就很好表示了,点在线上,就是点的齐次坐标(3维)点乘线的坐标=0。
两直线叉乘得到交点坐标
两个点的叉乘得到一条直线
点和线是对偶的,在平面射影几何中对点成立的定理对线也成立,因为他俩都是用3维向量表示
齐次坐标的最后一个坐标是0的话表示无穷远点
有无穷多个无穷远点,而且这些点都在(0,0,1)这条直线上,数量积为0
椭圆:conics
二次曲线和一个3乘3的对称矩阵对应,有6个元素,但是只有5个自由度,因为是up to scale的,也就是关心的是各元素之间的比值而不是具体的值
两条直线平行=其交点在无穷远点,所以变换要保持平行还是平行,只要保持那个无穷远直线不变就行
3维点加上第4维的坐标,变成齐次坐标,也就是变成射影空间的一个点
3维空间中点和平面对偶
射影几何:(射影几何是研究图形的射影性质,即它们经过射影变换后,依然保持不变的图形性质的几何学分支学科)
s相似变换(放缩旋转平移)——保留角度 a仿射变换——保留平行 底下行都是001
p射影变换——只保留3个点共线的结构(就是Homography ) (一般拍的照片中只保留了projective的信息),然后依次恢复a和s
直线叉乘得到交点坐标 底下行不是001
射影几何中的所有元素都是equel up to scale的
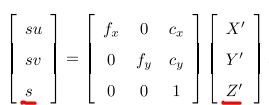
相机(数学)模型:
不是线性的,因为有除以z操作
写成齐次坐标形式后,就成了矩阵乘法(相机的投影矩阵),变成线性的了
将世界坐标系的原点移到相机坐标系的原点,重合 (目的是将世界坐标系中的点变换到相机坐标系)
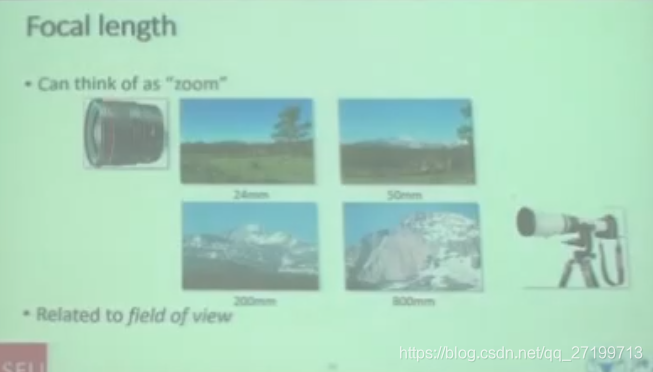
60度的FOV镜头,一般不会有畸变,但是鱼眼那种广角的会有畸变
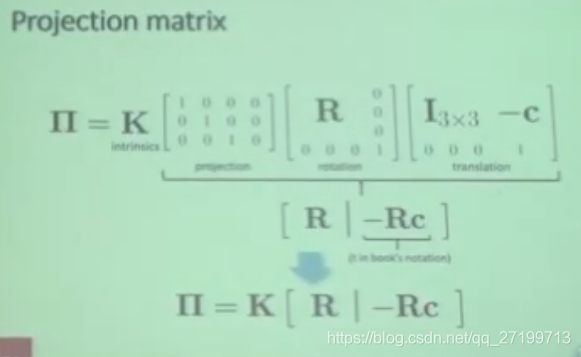
相机矩阵由外参和内参构成
有一个分析代数误差(没有几何意义,就是用数学变换)、几何误差(两个对应点中假设其中一个是精确已知的,另一个是包含噪声的,需要互相投影)、
重投影误差(两个对应点都有精确的和投影后的有噪声的点)的讲解 ——单应矩阵时讲的
相机矩阵(内参+外参)的每行和每列都有几何意义
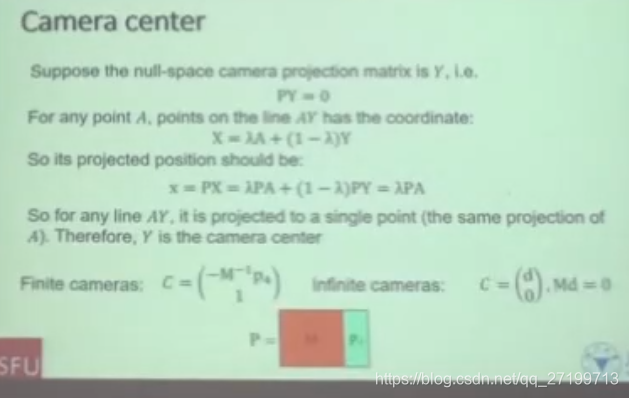
计算相机光心的坐标在 相机模型2中第37分钟
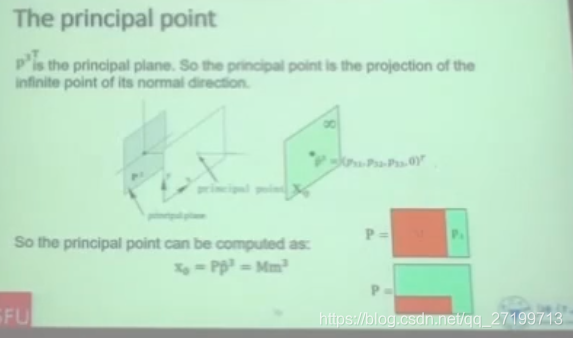
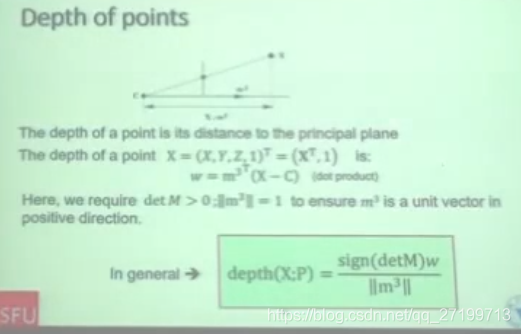
principal plane平面和相机成像平面平行,但是在相机的中心点上。点的深度是到这个平面的距离
Principal point指的是图像的中心点坐标,后又变成光心的坐标了
指的是凸透镜的中心,也就是小孔,也就是光心
标定:见课件
光流:运动有多大 warping(金字塔)
近处的物体运动大,远处的物体运动小
应对外点的方法:RANSAC和鲁棒核函数
第10章 几何和相机模型
齐次坐标:定义线、点、点和线的关系
有齐次坐标后点和线的关系就很好表示了,点在线上,就是点的齐次坐标(3维)点乘线的坐标=0。
两直线叉乘得到交点坐标
两个点的叉乘得到一条直线
点和线是对偶的,在平面射影几何中对点成立的定理对线也成立,因为他俩都是用3维向量表示
齐次坐标的最后一个坐标是0的话表示无穷远点
有无穷多个无穷远点,而且这些点都在(0,0,1)这条直线上,数量积为0
椭圆:conics
二次曲线和一个3乘3的对称矩阵对应,有6个元素,但是只有5个自由度,因为是up to scale的,也就是关心的是各元素之间的比值而不是具体的值
两条直线平行=其交点在无穷远点,所以变换要保持平行还是平行,只要保持那个无穷远直线不变就行
3维点加上第4维的坐标,变成齐次坐标,也就是变成射影空间的一个点
3维空间中点和平面对偶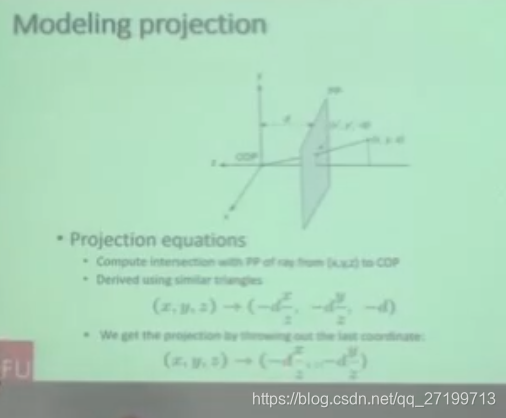
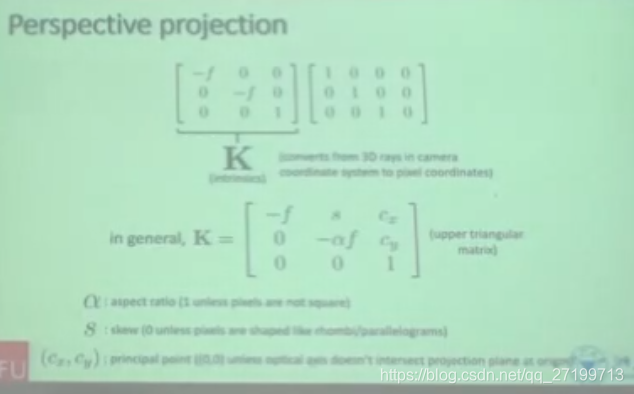
最后一行就是真实的点到图像平面的映射,映射到距离光心d的位置,3维坐标变成两维的图像坐标
之前学的affine等之类的都是线性变换,而相机模型不是线性的,因为有除法,但是变成齐次坐标就成了线性的了。
大家都喜欢线性的。
负号是因为为了变成右手坐标系,将z轴朝向成像平面的反向了。
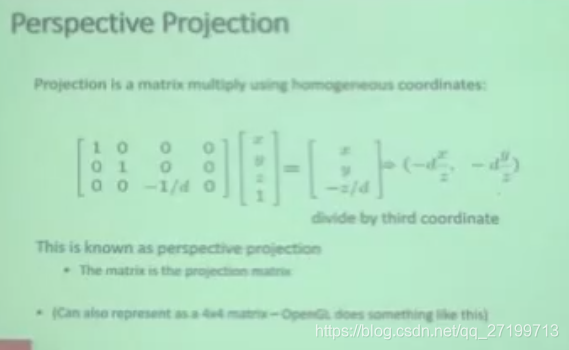
上面那个矩阵就是相机的投影矩阵
这样就成了线性的了
将摄影几何方法用进来就成了线性的了
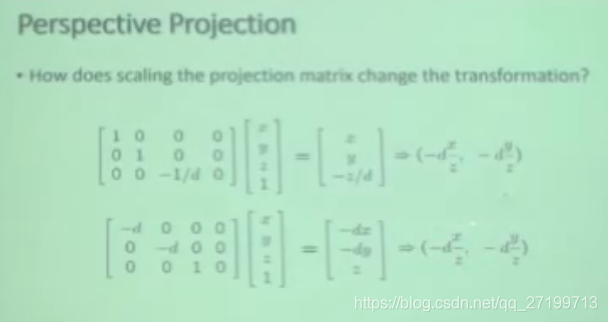
这个投影矩阵是up to scale的,如上矩阵同乘-d,最后得到的2维非齐次投影点坐标一样
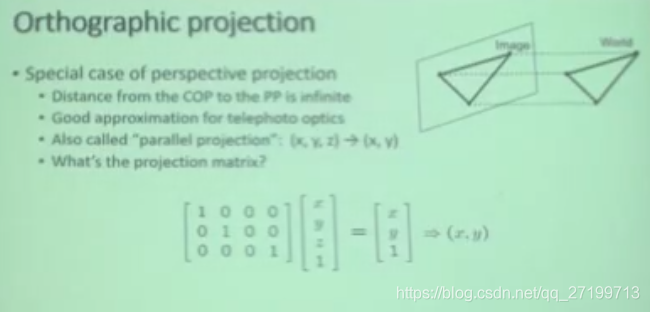
正交(平行)投影,直接将z坐标去掉就可以,d相当于是无穷大
以上都是3维点在本个相机坐标系中定义描述的
接下来引入世界坐标系
以上只是引入了一个参数d,接下来还要引入相机的位置和朝向信息

(0)得到相机矩阵:
当3维点在世界坐标系中定义时,首先需要将其变换到本相机坐标系中(也可以理解为将相机坐标系变到和世界坐标系重合,这样世界坐标系中的3D点就能向相机坐标系投影了),这就需要知道相机的位姿,而且相机的位姿(相机的位置和朝向)是在世界坐标系中描述的;然后再投影到图像平面。
这两种变换当引入齐次坐标后都变成线性的了,也就是矩阵相乘。
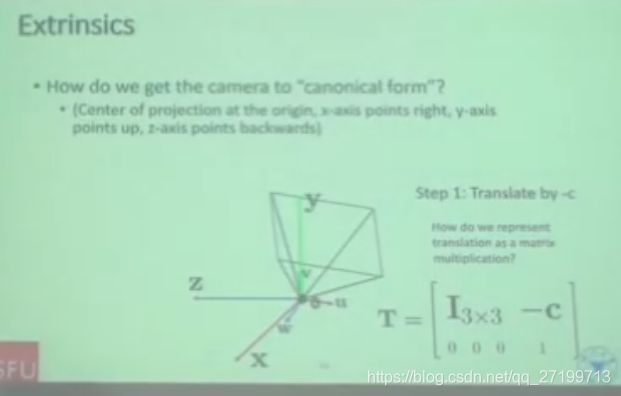
先进行平移:-c,因为相机的中心在c(世界坐标系中定义)处,做-c的平移将其移到世界坐标系的中心。然后原点就重合了。
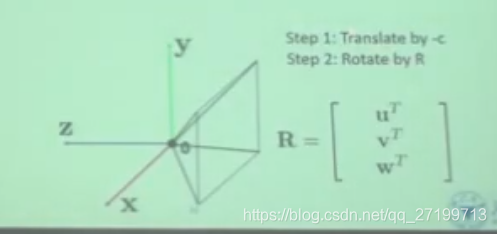
然后是旋转,将3个轴aline上。
这个矩阵是K矩阵:
相机的投影矩阵:
内参:就是相机运动时是不会变的,比如焦距
下面讲如何从相机矩阵3乘4矩阵中恢复出参数,比如:中心c,朝向R等。上个过程的逆过程
(1)确定相机中心:三维

P把相机中心坐标(待求)变换到(0,0,0)位置。
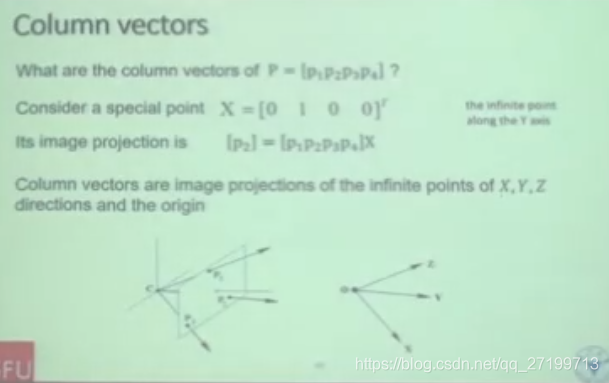
(2)相机的每一个列向量啥意思:
x=[0 1 0 0]T 表示一个沿着y轴的一个无穷远点,沿着y轴一直走到无穷远就到了这个点
相机矩阵的第2列表示y方向的无穷原点在图像上的投影坐标
第4列是世界坐标系的原点在图像坐标系下的坐标
(3)朝向,每一行是什么意思:
第3行是一个平面叫 principal plane(和图像平面平行但是在相机的中心点上),该平面上的会被投影到无穷远点,其中的三个元素是该平面的法向量,也就是平面的朝向,也即相机在世界坐标系下的朝向,这就是几何意义

(4)确定光心 principal point ,二维
(5)求深度——3维点到principla plane的距离
知道了相机矩阵,则任何3维点的深度都可以求出
思想:将3维点和相机中心的连线向相机朝向方向投影
总结:

这篇关于谭平老师课——相机模型的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








