机器人学专题

【Rust光年纪】Rust 机器人学库全景:功能、安装与API概览
机器人学+Rust语言=无限可能:六款库带你开启创新之旅! 前言 随着机器人技术的快速发展,对于机器人学领域的高效、可靠的编程语言和库的需求也日益增加。本文将探讨一些用于 Rust 语言的机器人学库,以及它们的核心功能、使用场景、安装配置和 API 概览,旨在为机器人学爱好者和开发人员提供参考和指导。 欢迎订阅专栏:Rust光年纪 文章目录 机器人学+Rust语言=无限可能:

【机器人学】7-4.六自由度机器人自干涉检测-两圆柱体空间关系【附MATLAB代码】
目录 前言 公式推导 MATLAB代码 前言 前面介绍了两个圆柱的旋转变换,已将两个圆柱体旋转到了比较好分析的位置,下面将正式分析两个圆柱体的位置关系。会借用投影的思想。 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY

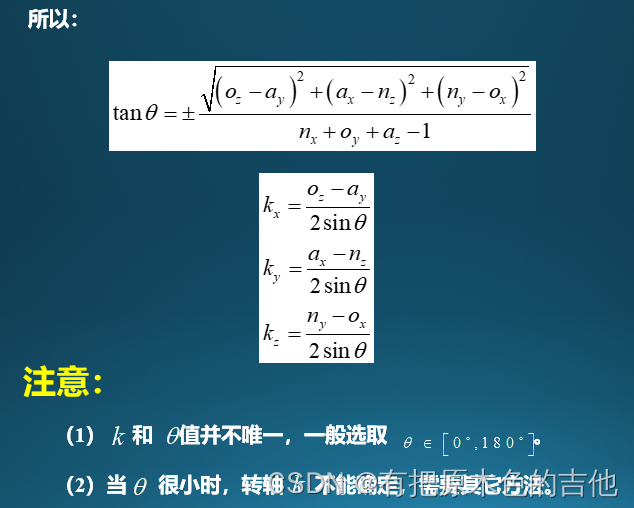
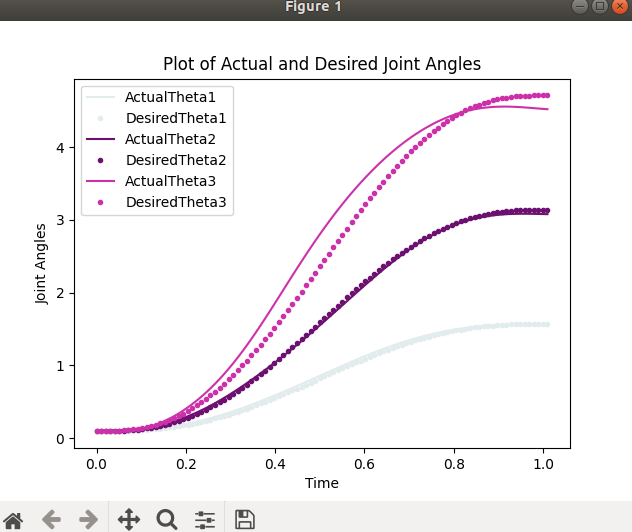
【机器人学导论】6自由度机械臂逆运动学求解—牛顿法(数值法,仅旋转关节)
我以前是机器人专业,不过学的不多,教程应该是灰色封面的《机器人学导论》。3年前学的了,软件仿真学的是ABB,上手操作是KUKA的机器人。本文是给别人解决问题的记录,写个笔记。代码是matlab的,不免费分享,但是看我的解析应该也能自己写出来。我不从事这个行业,很多东西已经模糊了。 文章目录 一、DH参数二、正向运动学三、逆向运动学3.1 逆向运动学的求解方法:3.11 解析法(Ana

【机器人学】7-3.六自由度机器人自干涉检测-圆柱体的旋转变换【附MATLAB代码】
前言 上一章确定了机械臂等效的圆柱体的上下圆心坐标,这篇文章将解决算法三个核心中的第二个核心: 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY平面的
Underactuated Robotics - 欠驱动机器人学(三)- 体操机器人、小车摆杆和四旋翼飞行器
系列文章目录 前言 在低维模型系统的背景下,已经开展了大量有关欠驱动系统控制的工作。这些模型系统捕捉到了问题的本质,却没有引入更真实世界的例子中经常涉及的所有复杂性。在本章中,我们将重点讨论两个最著名、研究最深入的模型系统--Acrobot 和 Cart-Pole。在我们开发了一些工具后,我们将看到这些工具可以直接应用于其他模型系统;我们将使用四旋翼机器人举出一些例子。所有这些系统都是

机器人学——机械臂轨迹规划-2
直线轨迹 线段转折点速度不连续 加速度状态讨论 double dot 多段直线轨迹,转折点利用二次方程转为圆弧 关键步骤 第一个线段处理 Vt = V0 + at , 此处的V0 = 0 , 利用函数连续性,左右速度相等,联立求解 sgn(x):符号函数 最后一个线段处理 真实系统中的加速度影响因素 规划轨迹未通过via points 若通过

机器人学——正向运动学(机械臂)
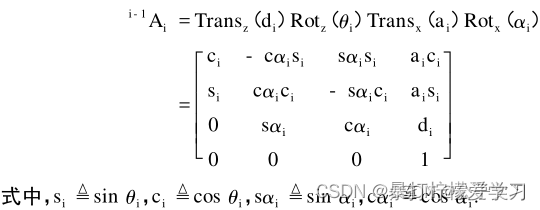
Manipulator Forward Kinematics 机械臂基础概念 Joint and Link 连杆长度、连杆夹角 连杆偏距与关节角 移动关节看距离、旋转关节看角度 如何在杆上建立坐标系 地杆(link0)坐标系的建立 末端杆件坐标系的建立 DH表达法 如何计算出两杆之间的变换矩阵? 初始状态 对Axis i-1 的z轴进行旋转
Underactuated Robotics - 欠驱动机器人学(一)- 全驱动与欠驱动系统
系列文章目录 前言 如今的机器人行动过于保守,只能完成机械性能所能完成的一小部分任务,实现一小部分性能。在某些情况下,我们仍然从根本上受限于在结构化工厂环境中成熟的刚性机械臂控制技术,在这种环境中,可以使用大型致动器来 "塑造 "机器的动态,以实现精度和可重复性。欠驱动机器人技术的研究重点是构建控制系统,利用机器的自然动态,力图在速度、效率或鲁棒性方面实现非凡的性能。
机器人学论文——智能施药机器人调研报告
目录 摘 要 Abstract 第一章:引言 1.1研究背景 1.2 研究意义 1.3文章架构 第二章:智能施药机器人发展现状 2.1引言 2.2 大田智能施药机器人发展现状 2.3 果园智能施药机器人发展现状 2.4 设施农业智能施药机器人发展现状 第三章:智能施药机器人移动平台设计 3.1引言 3.2 轮式施药机器人移动平台 3.3 履带式施药机器人移动平台 3.4 足式施药机器人移动平台

机器人学环境配置(VM-16 + Ubuntu-20.04 + ROS-noetic)
目录 一、安装好 VMware Pro 16(基于win11) 1. 下载 2. 安装过程 二、成功配置Ubuntu20.04.6 1. 下载 2. 新建虚拟机进行配置 3. 安装操作系统镜像 4. 更改Ubuntu软件源 5. Windows与Ubuntu跨系统复制粘贴 三、成功配置与Ubuntu20.04对应的ROS 1. 按ctrl+alt+t打开终端并在其中依次输入

机器人学中的数值优化(一)
Preliminaries 0 前言 最优解 x ∗ x^{*} x∗在满足约束的所有向量中具有最小值。 两个基本的假设: (1)目标函数有下界 目标函数不能存在负无穷的值,这样会使得最小值无法在计算机中用浮点数表示,最小值可以很小但必须有界 (2)目标函数具有有界子区间映射 sub-level sets就是下水平集,此时要求目标函数不能存在当x趋于无穷时函数趋于某个值即下水平集无界,
【机器人学】-位姿描述和旋转变换(2)
机器人学基础-旋转变换 空间旋转矩阵中有九个元素,但是这九个元素满足六个约束方程,只有三个独立变量 ABX = [ AXB AYB AYB ] = [ R 11 R 12 R 13 R 21 R 22 R 23 R 31 R 32 R 33 ] \begin{bmatrix}R11 & R12 & R13 \\ R21 & R22&R23\\R31&R32&R33\\ \end{bmatri

【机器人学】串联机械臂连杆的速度及加速度推导
1. 反对称矩阵及其性质 定义一个( n n n× n n n)的矩阵 S \textbf{S} S,如果满足 S + S T = O \textbf{S}+\textbf{S}^T=\textbf{O} S+ST=O,则矩阵 S \textbf{S} S被称为反对称矩阵。 对于三维向量 a = ( a x , a y , a z ) T \textbf{a}=(a_x, a_y,a_z)^T
【现代机器人学】学习笔记十三:配套代码解析
最近一直忙于工作,每天都在写一些业务代码。而目前工程中的技术栈并没有使用旋量这一套机器人理论系统,因此时间长了自己都忘记了。 于是决定把这本书配套的代码内容也过一遍,查漏补缺,把这本书的笔记内容完结一下。 代码来源于github:https://github.com/NxRLab/ModernRobotics 其中Python部分,相关的函数一共有47个,其实也不是很多。 读者朋友们可以配

【机器人学2】二自由度机械臂建模及控制
一、基础知识 (1) PID控制:Kp比例、Ki积分、Kd微分; (2) 坐标变换基础 (3) atan2(y,x)双参数反正切 二、具体案例 对机械臂进行逆运动学求解: (1) (2) (3) (4) (5)建立如下图所示的二自由度机械臂 P点坐标: P=Rot(theta2,‘z’)*[a;0;0]; E点坐标: E=P+Rot(theta2,‘z’)Rot(phi,‘z’)[

机器人学之运动学笔记【6】—— 用抛物线过渡的线性插值轨迹规划方法
机器人学之运动学笔记【6】—— 用抛物线过渡的线性插值轨迹规划方法 1. 规划方式2. 加速度状态讨论3. 多段 Linear Function with Parabolic Blends3.1 中间段的轨迹规划3.2 头段的轨迹规划3.3 尾段的轨迹规划3.4 注解3.5 规划后轨迹并未通过 via points 4. Cartesian Space下轨迹几何限制的几种情况5. 举个栗子
机器人学——标准DH建模
#图示 一、连杆坐标系的建立 连杆坐标系是与机器人各连杆固连的坐标系,这是由Danevit Harttnberg提出的故称为DH方法。对于n自由度机器人,建立与各杆件固连的坐标系的步骤为: 第一步:确定各坐标系的Z轴: 基本原则为:选取轴为关节i+1的轴向(指向可以任选,但是通常将各平行的Z轴的指向取为相同)。另外,机器人远端没有关节n+1,这时可以选取轴和轴重合 。 第二步:确定各坐

【机器人学:运动规划】OMPL开源运动规划库的安装和demo
转载:http://blog.csdn.net/gpeng832/article/details/73736225 开源运动规划库(OMPL)是美国莱斯大学的kavrakilab开发的,包含了当下主流的运动规划器。对于机器人方向的同学来说,无论是做移动机器人还是机械臂,这是必须要学习的工具。 在ubuntu14.04环境下,安装OMPL是比较简单的。 首先进入OMPL的官网http://om

《机器人学导论》——探究未来世界的奇妙之旅
你是否感到生活变得越来越便利、智能?是的,这些都与机器人技术的发展密不可分。而想要更深入地了解机器人技术,一本好的书籍是必不可少的。那么,今天作者要向大家推荐的就是这样一本优秀的机器人学大作——《机器人学导论》。 《机器人学导论》这本书的作者是美国加州大学圣塔克鲁兹分校的机器人学教授约翰·克雷格(John Craig)。在书中,他用通俗易懂的语言和大量的实例,向读者介绍了机器人运动学、动力学、控
「 机器人学 」“姿态角 roll、yaw、pitch”讲解
一、前言 载体坐标系与载体坐标系的关系是三个Euler角:yaw,pitch,roll,反应了载体相对基准面的姿态。 二、姿态角讲解 1. pitch是围绕X轴旋转,也叫做俯仰角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负,如下图所示: 2. yaw是围绕Y轴旋转,也叫偏航角。即机头右偏航为正,反之为负。
「 机器人学 」“里程计/仪技术”浅谈
一、前言 它的功能就是利用传感器的数据来推算机器人位置随时间的变化,常用的传感器类型有编码器、惯性测量单元和视觉传感器等。理论上里程计数据不存在任何误差。 二、里程计模型 里程计模型分为圆弧模型和直线模型两种。圆弧模型同时考虑了机器人的位移变化和航向角的变化,更加接近机器人的运动轨迹。直线模型是假设机器人在极短时间内航向角的变化为零,是对圆弧模型的一种简化

机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例
机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例 1.任务描述2. 参数设定3. 方法一:以linear function with parabolic blends 在 Cartesian space 下规划轨迹3.1 步骤一3.2 步骤二3.3 步骤三3.4 步骤四3.5 步骤五 4. 方法二:以linear function with parabolic blends 在 Join
【现代机器人学】学习笔记十四:中文版印刷/翻译勘误
首先声明,这个印刷/勘误并非经过官方的认可,只是我个人的粗浅的理解。如果内容有误,恳请大家谅解指正。 其实有的并不算错,只是我个人认为不太准确,在我学习过程中产生了一些小疑惑和误解。 都是一些小毛病,瑕不掩瑜,本文的目的并非挑刺。在我心目中这本书是经典中的经典,中文版的翻译也是难得的精品。 此外,我所整理的内容应该也不完善,也请大家一起进行补充。 英文版wiki主页: Modern Ro