小海龟专题
机器人操作系统ROS2学习—控制小海龟运动
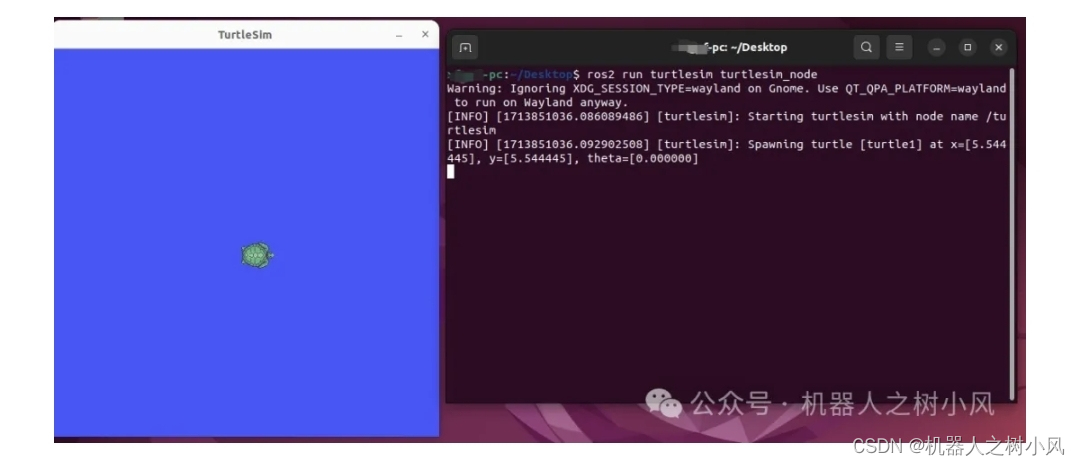
将Ubuntu系统和ROS2安装完成后,就可以进行调用小海龟运动了。 一、打开Ubuntu系统后,调用终端窗口。有3 种方法可以打开启动终端: 1、通过快捷键Ctr+AIt+T; 2、桌面左下角有个显示应用的菜单,点击后找到终端“Terminal”图标,打开即可; 3、点击鼠标右键,选择“Open in Terminal"也能打开终端。 打开终端界面如下: 二、输入第一个
ROS 小海龟turtle 原地画圈 python实现
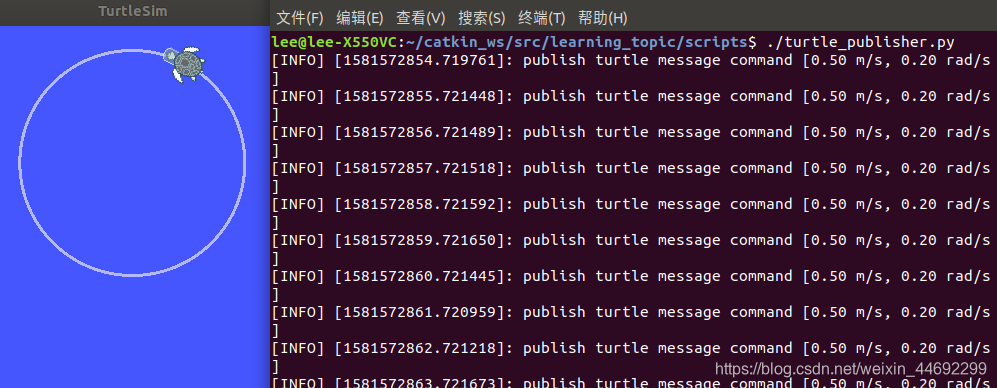
小海龟turtle原地转圈 Python实现 /turtle1/cmd_vel [geometry_msgs/Twist] / linear.x angular.z #!/usr/bin/env python# coding:utf-8import rospyfrom geometry_msgs.msg import Twistdef turtle_publisher():rospy.i

使用linux子系统安装ROS运行小海龟
使用Microsoft Store下载好UBUNTU18.04后: 开启SSH。 可使用Windows PowerShell一键开机并开启ssh:【wsl -d ubuntu-18.04 -u root /etc/init.d/ssh start】 使用windows自带的远程桌面连接,则需要开启图形化界面。见其他命令3脚本,开启后即可使用远程桌面连接到localhost:3390。 一
Ubuntu18.04下安装ROS日志及小海龟示例教程
文章目录 一、什么是ROS?二、ROS系统安装小海龟示例总结 一、什么是ROS? ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议。 详细资料参考:ROSwiki ROS架构设
ROS例程——小海龟仿真
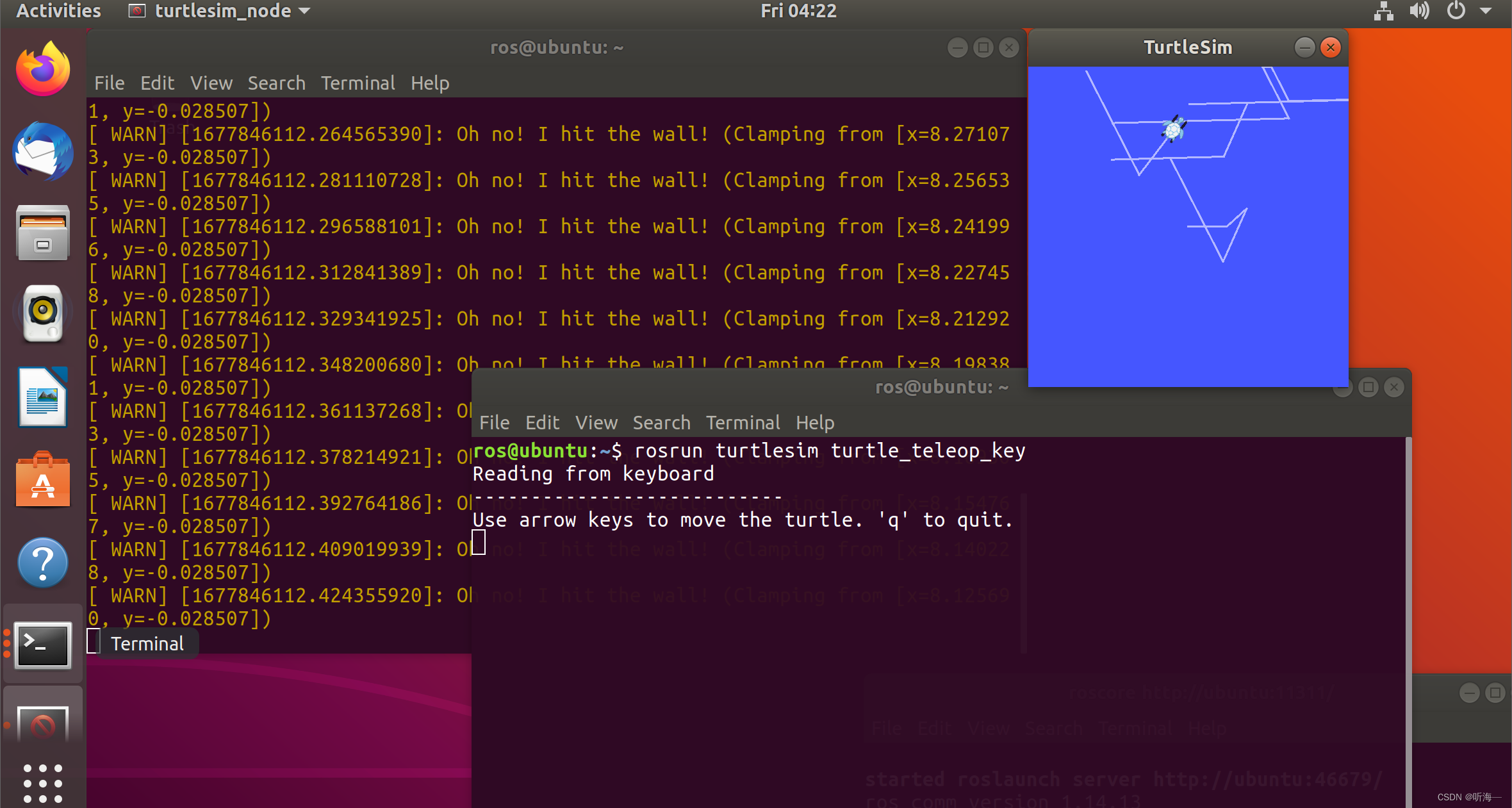
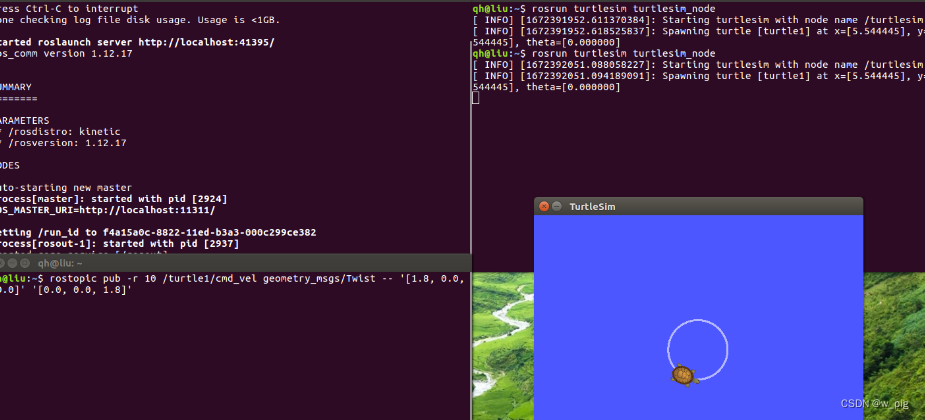
第一个ROS例程(小海龟仿真) 1. 启动ROS Master(第一个终端) roscore 2. 启动小海龟仿真器(第二个终端) rosrun turtlesim turrlesim_node 3. 启动海龟控制节点(第三个终端) rosrun turtlesim turtle_teleop_key 4. 使用 rqt_graph 可视化工具参看计算图 rqt_grap
python 小海龟 教案_Python少儿编程全集(一):一只小海龟(turtle库的使用)
这是Python少儿编程全集系列课程第一课,一只小海龟(tutle库的使用) 视频如下: 课程内容如下: 1.召唤小海龟,导入turtle及设置海龟图形 import turtle turtle.shape("turtle") 2.设置背景颜色为蓝色 turtle.bgcolor("blue") 3.让小海龟向前出发,移动距离为150px turtle.forward(150) 4.让小海龟右转
Ubuntu18.04安装ROS并实现小海龟仿真
文章目录 一、Ubuntu18.04安装ROS软件1、添加ROS软件源2、添加秘钥3、安装ROS4、初始化rosdep5、设置环境变量6、安装rosinstall7、验证ROS是否安装成功 二、ROS的常用命令三、运行小海龟demo例子(通过键盘控制小海龟运动)四、c++程序使小海龟走圆形1、建立ROS工作空间2、小海龟画圆程序编写3、启动ros小海龟 一、Ubuntu18.04


Ubuntu20.04安装ROS——实现小海龟仿真
Ubuntu20.04安装ROS——实现小海龟仿真 文章目录 Ubuntu20.04安装ROS——实现小海龟仿真一.ROS的基本介绍1.一个目标2.五个特点3.四位一体 二.ROS软件安装1.添加ROS源2.添加密钥3.安装ROS4.初始化rosdep5.设置环境变量6.安装rosinstall 三.ROS 第一个例程:小海龟1. 启动ROS Master2.启动小海龟仿真器(`另外启

树莓派:Ubuntu MATE 16.04.2 运行 ROS 小海龟教程
树莓派:Ubuntu MATE 16.04.2 运行 ROS 小海龟教程 1 前言1.1 小海龟例程1.2 准备工作 2 运行步骤3 结束 1 前言 1.1 小海龟例程 小海龟例程是 ROS 提供的样例程序,一般用来测试 ROS 的安装是否正常;其具体功能是通过键盘方向键控制小海龟图标行走。 1.2 准备工作 (1)镜像版本:Ubuntu MATE 16.04.2
ROS2最新版本Dashing Diademata安装教程,并且Run你的第一个经典例程“小海龟”
安装系统及一些包无疑是让人头大的事,你会遇到许多莫名其妙的报错,写这篇文章的主要原因也在于此,希望对你有所帮助。 此教程的系统环境是VMware Workstation 15 Pro 虚拟机 + ubuntu 18.04 玩笑时刻:最近有点痴心于明朝衰败原因的历史,阅读了一些历史资料和书籍,属于边整理刚刚结束的ROS2019暑期学校资料,边看历史资料的繁忙阶段,另外本文第三部分主要也是来自于本次

【ROS教程demo】用C++创建一个ROS节点,发布指令使得小海龟做圆周运动
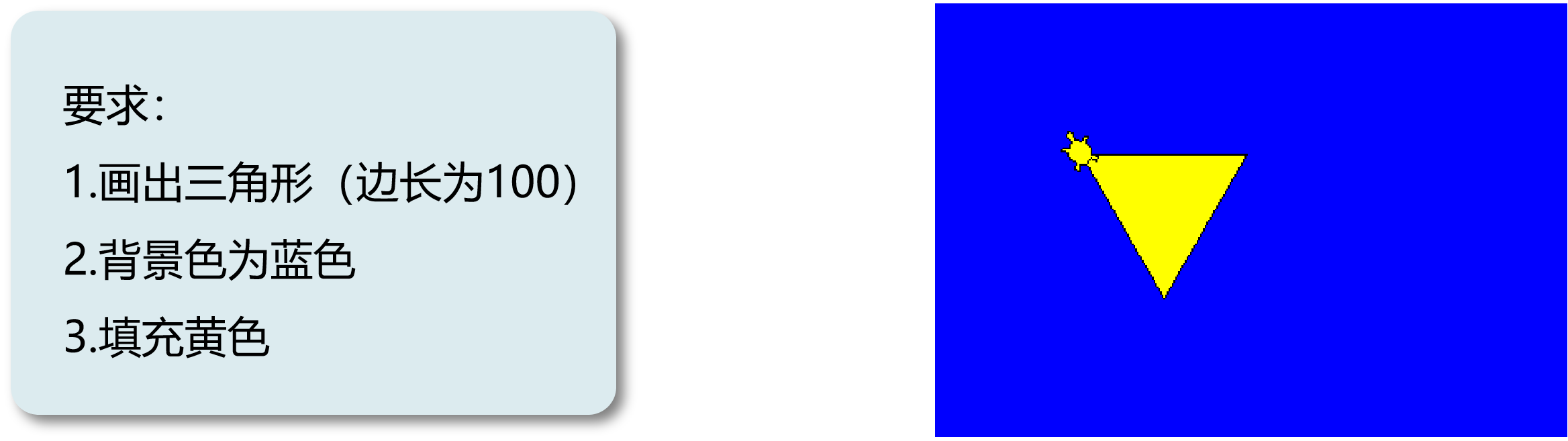
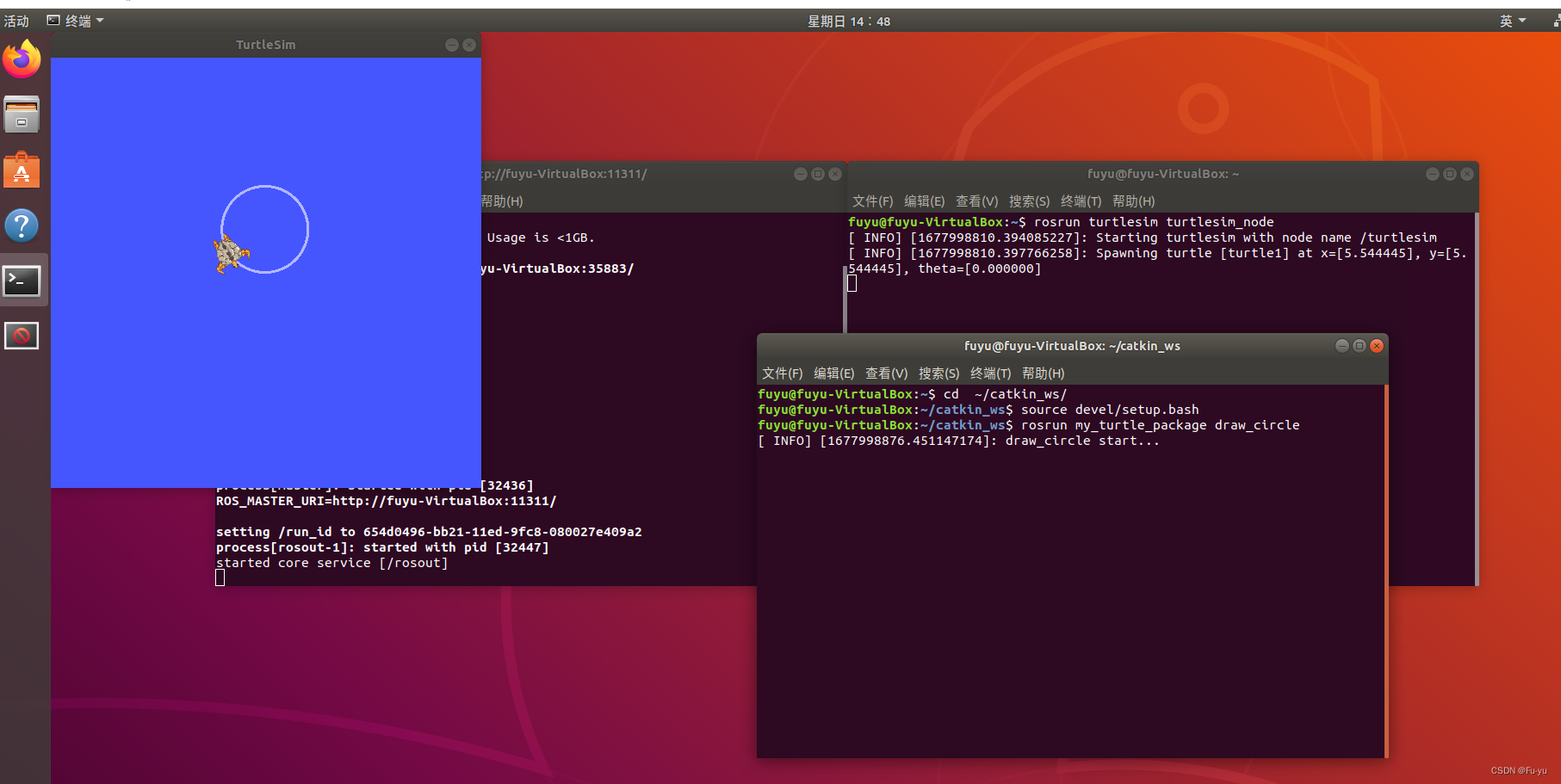
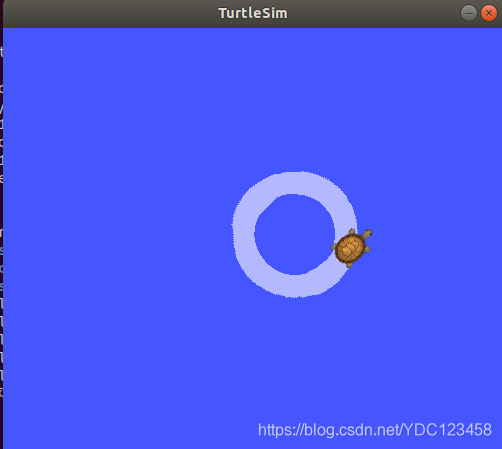
ROS创建节点发布命令使得小海龟做圆周运动 1.任务需求2.任务分析2.1发布方topic和msg2.2接收方topic和msg2.3目标明确! 3.创建ROS节点3.1创建发布方节点pub_pose3.2创建订阅方节点sub_pose 1.任务需求 创建一个节点,在其中实现一个订阅者和一个发布者,完成以下功能: 发布者:发布海龟速度指令,让海龟做圆周运动;订阅者:订阅海

Python绘图——认识turtle小海龟
海龟作图,turtle是Python重要的标准库之一,我们可以编写指令让一个虚拟的小海龟在屏幕上来回移动。这个海龟带着一只钢笔(pen),我们可以让海龟无论移动到哪都使用这只钢笔来绘制线条。 海龟作图最初源自20世纪60年代的Logo编程语言(教育编程语言),但一些很酷的Python程序员构建了一个库(可以重复利用的代码的一个集合),turtle库可以帮助我们在Python中使用海龟作图。 如