本文主要是介绍机器人操作系统ROS2学习—控制小海龟运动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
将Ubuntu系统和ROS2安装完成后,就可以进行调用小海龟运动了。
一、打开Ubuntu系统后,调用终端窗口。有3 种方法可以打开启动终端:
1、通过快捷键Ctr+AIt+T;
2、桌面左下角有个显示应用的菜单,点击后找到终端“Terminal”图标,打开即可;
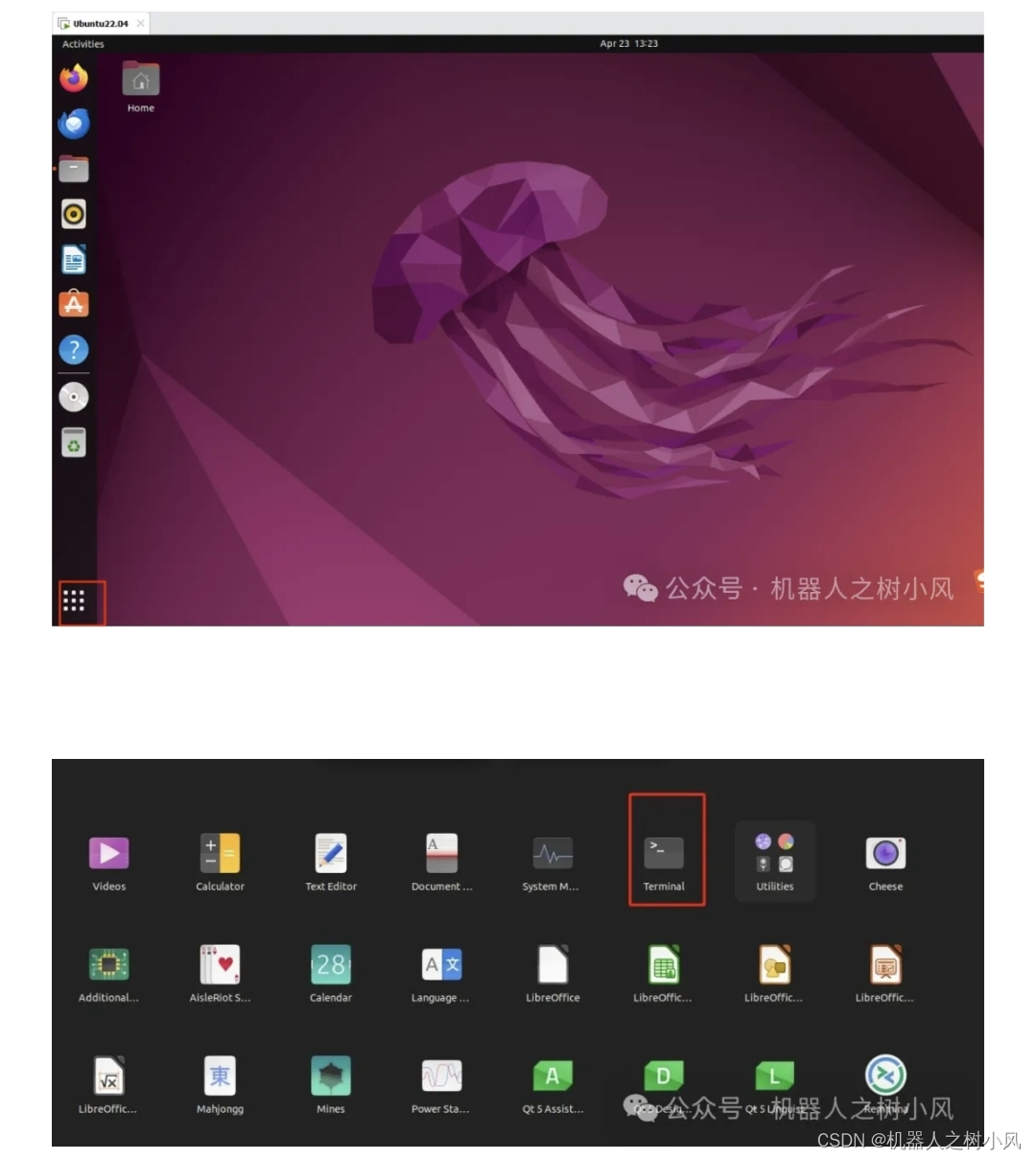
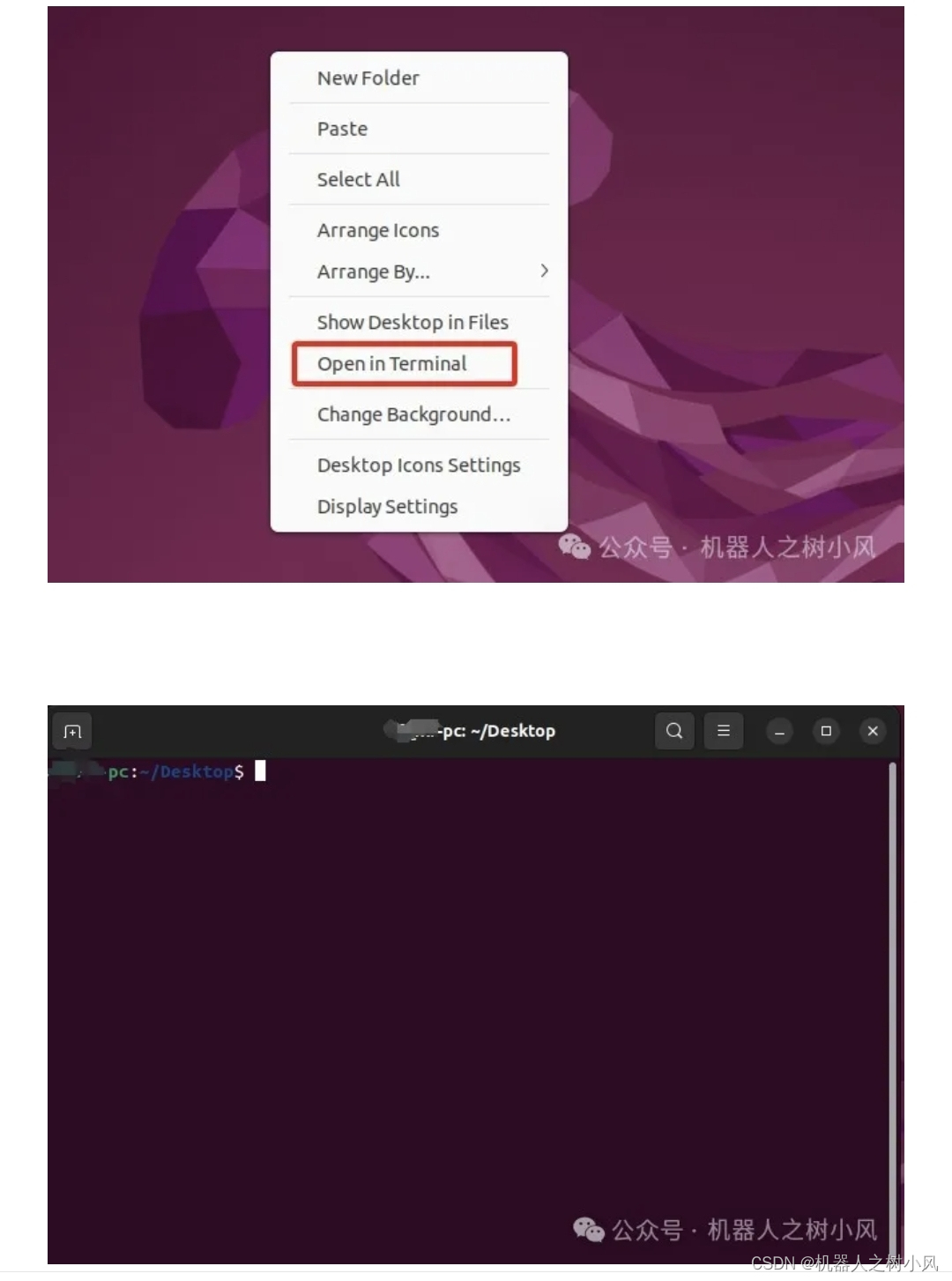
3、点击鼠标右键,选择“Open in Terminal"也能打开终端。
打开终端界面如下:
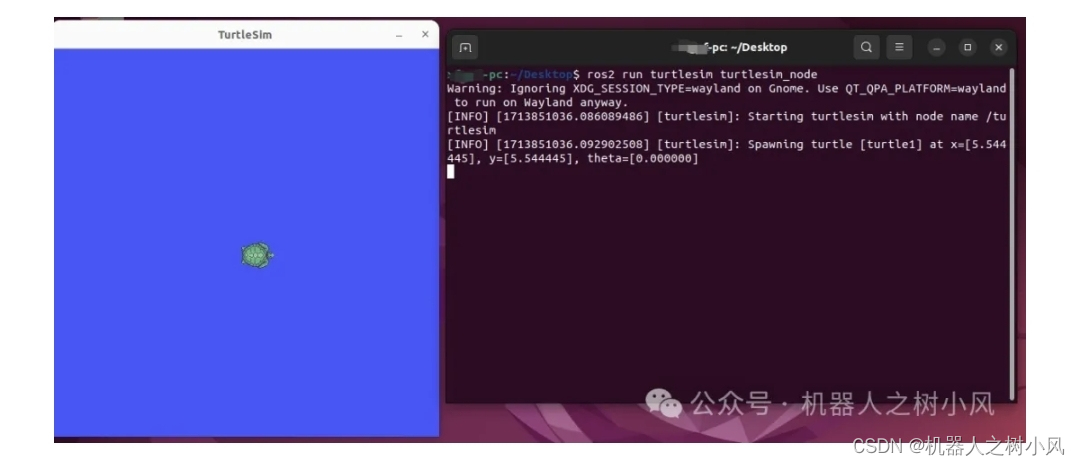
二、输入第一个指令:ros2 run turtlesim
turtlesim_node
将启动一个有蓝色背景的小海龟仿真器:
三、再打开一个终端窗口,接着输入另一个指令: ros2run turtlesim turtle_teleop_key
启动后用来通过键盘来控制小海龟的运动:
在同名公众号可以查看更多关于机器人技术。
这篇关于机器人操作系统ROS2学习—控制小海龟运动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








