本文主要是介绍小海龟仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一.ROS软件安装
1… 设置源列表
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ lsb_release -cs main” > /etc/apt/sources.list.d/ros-latest.list’
2. 密钥设置
sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3… 安装ros
.sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
4. 初始化rosdepc
. sudo apt-get install python-pip3
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
5. 设置环境变量
echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc
source ~/.bashrc
6… 安装生成包依赖
sudo apt-get install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
测试
打开三个终端,依次运行一下指令
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
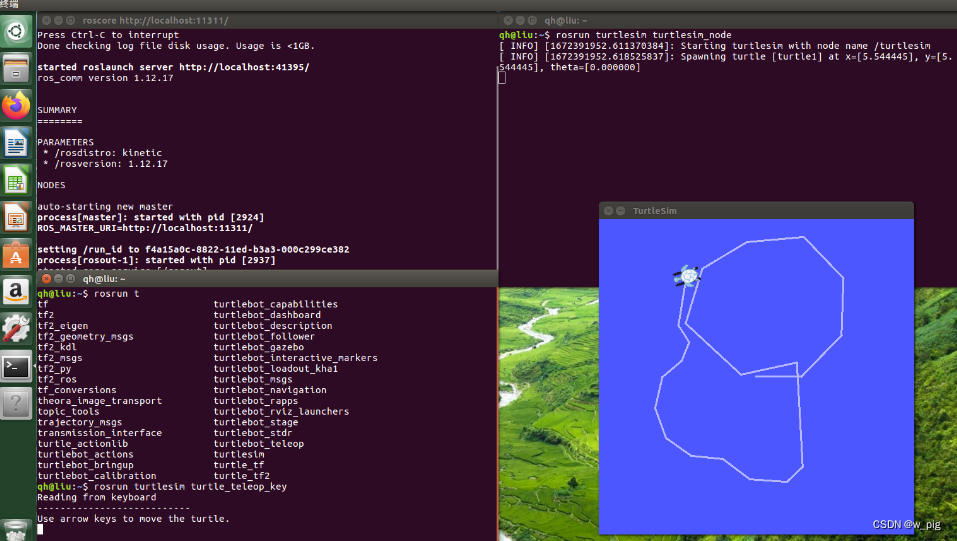
一、启动海龟并用键盘控制
打开终端,启动ROS Master
roscore
打开新终端,启动小海龟仿真器
rosrun turtlesim turtlesim_node
打开新终端,启动海龟控制节点
rosrun turtlesim turtle_teleop_key
这样,就可以通过键盘的上下左右控制海龟移动
结果如下
这时,我们可以打开新的终端,查看节点与话题信息
rosnode list
/rosout
/teleop_turtle
/turtlesim
表明此时有三个节点在运行
通过以下命令可以查看节点关系图
rosrun rqt_graph rqt_graph
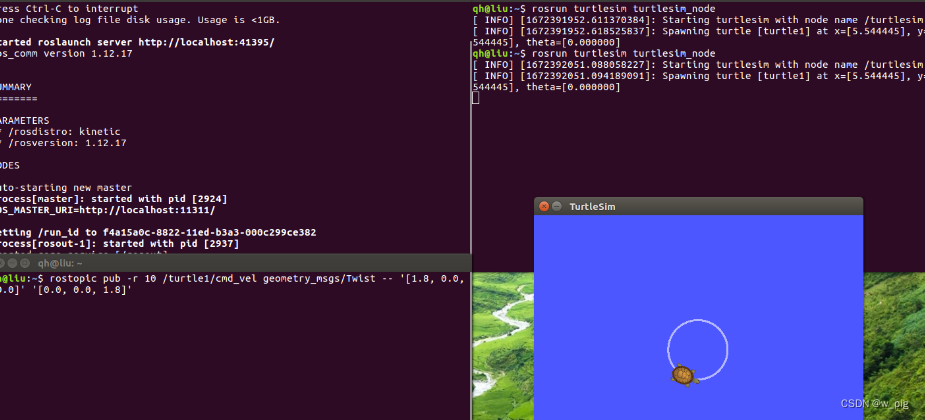
二、控制海龟画圆
1.用命令行
打开终端,启动ROS Master
roscore
打开新终端,启动小海龟仿真器
rosrun turtlesim turtlesim_node
打开新终端,创建发布者
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist – ‘[1.8, 0.0, 0.0]’ ‘[0.0, 0.0, 1.8]’
或
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist “linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0”
其中linear是线速度,angular是角速度
结果如下:
三.总结
通过本次实践 使我对ros控制有了初步的了解 相信在以后的学习中 可以对其有更深厚的理解 对ros的一些基本命令还需要更加牢记 掌握
这篇关于小海龟仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








