本文主要是介绍Ubuntu18.04下安装ROS日志及小海龟示例教程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、什么是ROS?
- 二、ROS系统安装
- 小海龟示例
- 总结
一、什么是ROS?
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议。
详细资料参考:ROSwiki
- ROS架构设计:
1、os层:依托linux操作系统,
2、中间层:基于TCPROS/UDPROS的通信系统,通过发布/订阅,客户端/服务端等模式,实现多种通信机制的数据传输。 Nodelet数据传输方式 数据库。
3、应用层:需要运行一个管理者Master,负责管理整个系统的正常运行;
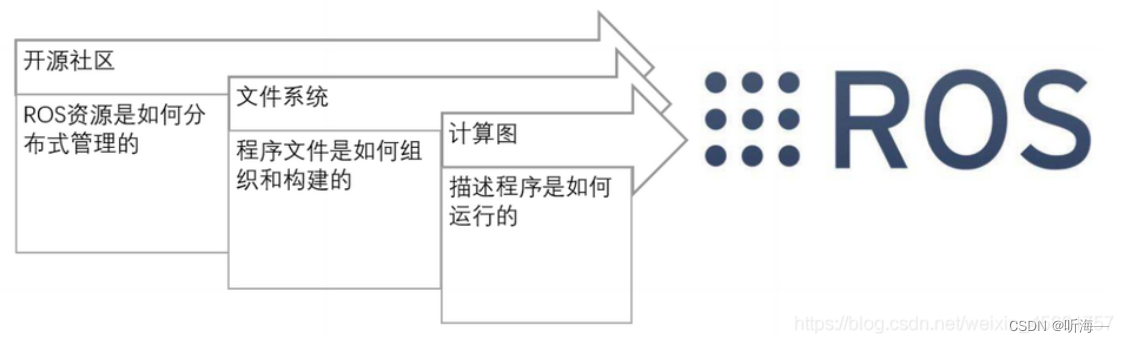
从系统实现的角度来看,ROS也可以分为三个层次:文件系统,计算图和开源社区
二、ROS系统安装
一键安装教程:鱼香ROS
- 以下是手动安装步骤
1. 添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

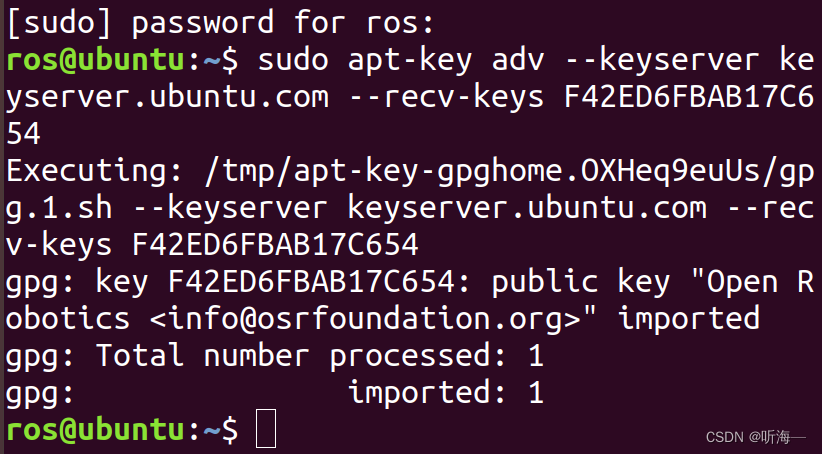
2. 添加密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
3. 安装ROS
需要根据Ubuntu的版本选择合适的ROS版本。否则会出现Unable to locate package ros-kinetic-desktop-full的错误。ROS的版本主要有Melodic(18)、Lunar(20)、Kinetic(16)版本,根据linux系统不同选择合适的版本,报错也就解决了。安装时间比较长。
sudo apt update
sudo apt-get install ros-melodic-desktop-full
安装完成截图,安装过程耗时30min
4. 初始化ROSdep
sudo rosdep init
rosdep update
报错信息:

解决办法:
sudo apt install python-rosdep
rosdep是ros的一个功能包

接下来更新rosdep的时候,会提示请初始化rosdep,出现报错信息:

解决办法:rosdep更新失败解决办法
参考以上文章,我的解决办法:
-
sudo apt install python-pip
-
pip -v
-
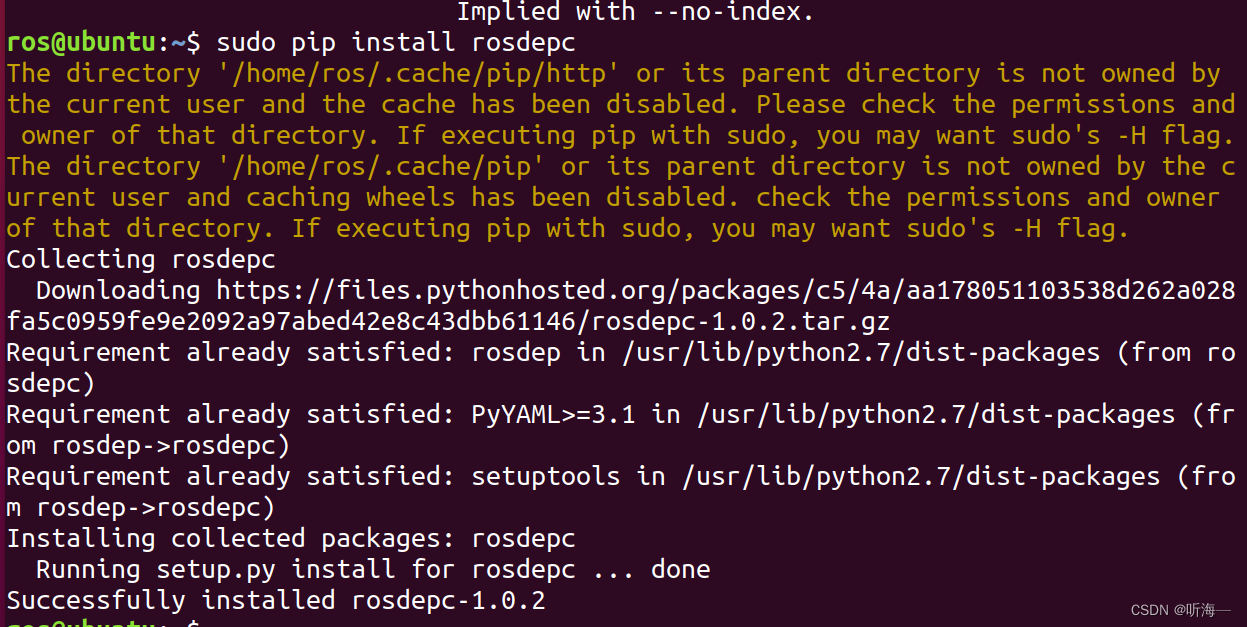
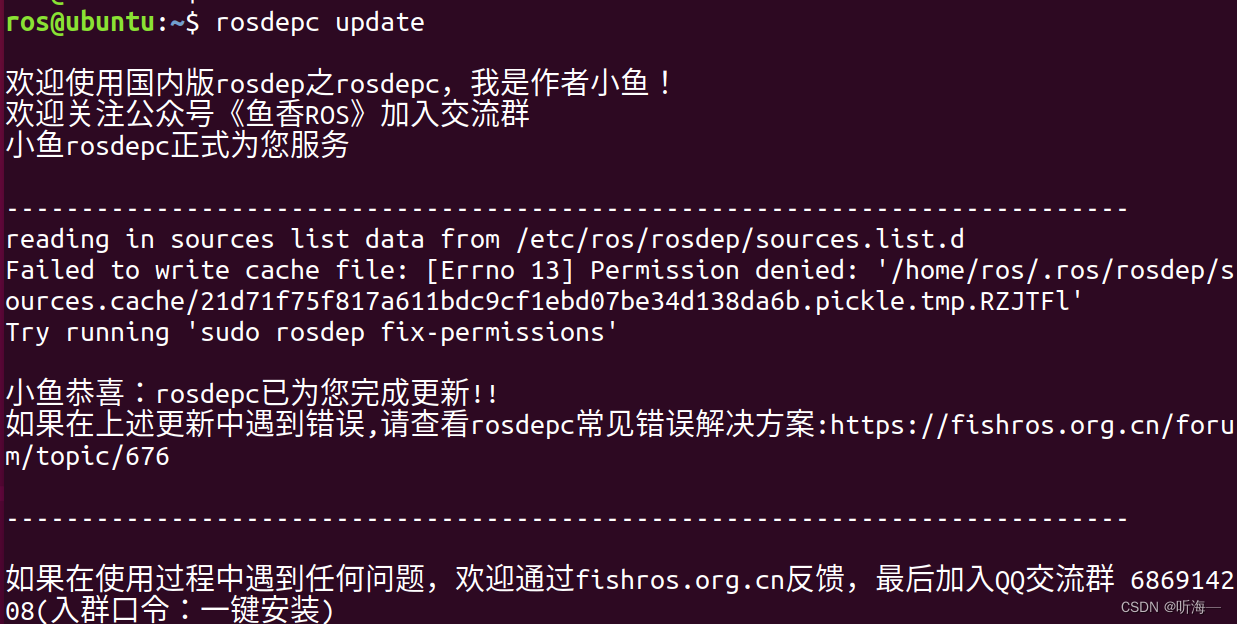
. sudo pip install rosdepc
- sudo rosdepc init
会有奇迹与魔法出现的哦~

- 背负着全Ubuntu的使命敲下:rosdepc update
5. 设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6. 安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
小海龟示例
- 启动ROS Master
roscore

报错:IOError: [Errno 13] Permission denied: ‘/home/ros/.ros/roscore-11311.pid’
这个问题是由于该路径下ros文件权限造成的。
输入以下命令修改权限:
sudo chmod 777 -R ~/.ros/
修改完成后再次输入roscore就ok了

rosmaster启动成功。
-
启动小海龟仿真器
新打开一个终端,输入:
rosrun turtlesim turtlesim_node -
启动海龟控制节点
新打开一个终端,输入:rosrun turtlesim turtle_teleop_key
可以用键盘上的方向键控制小海龟的移动方向。
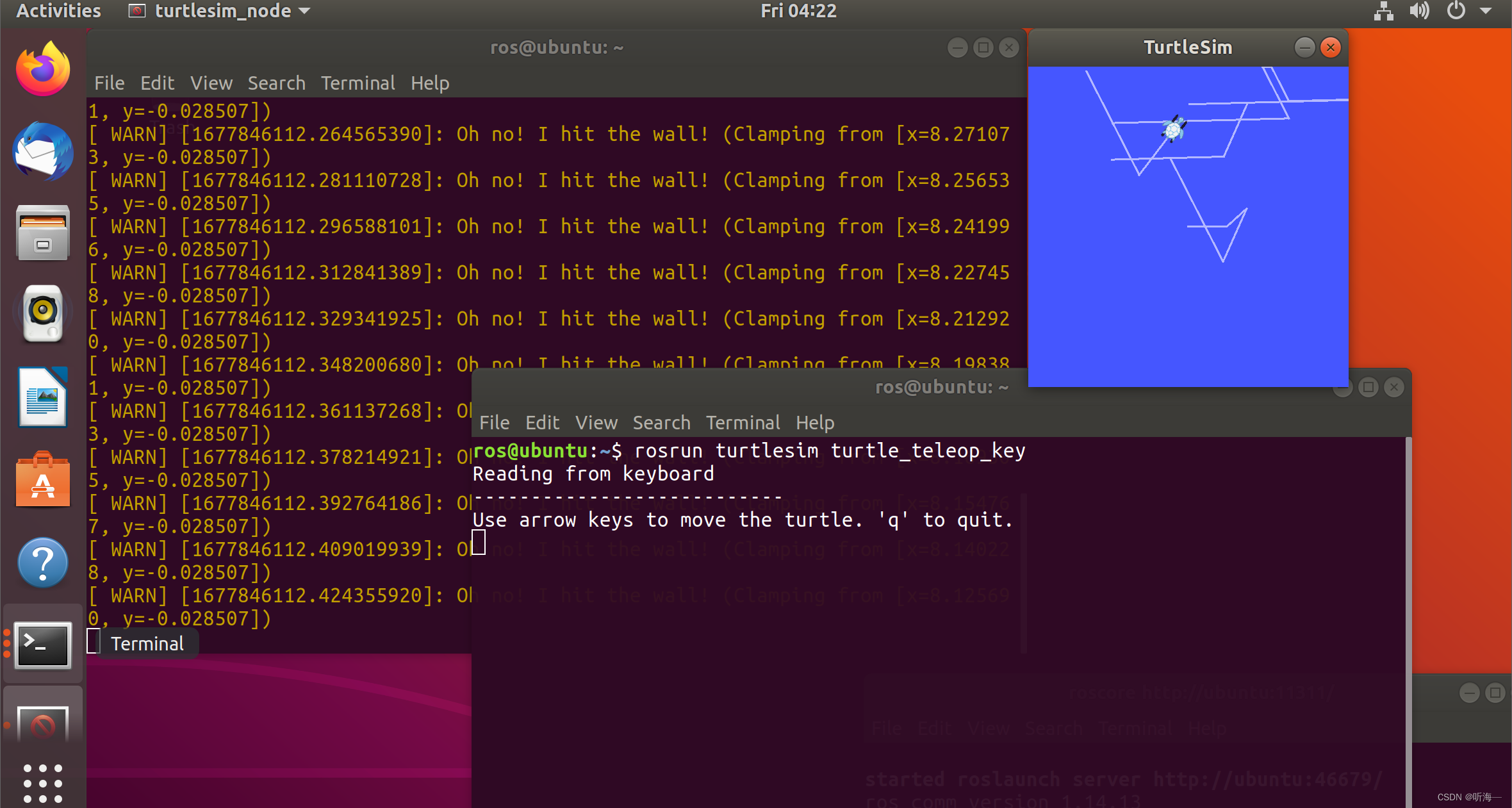
注意:如果你无法通过方向键改变小海龟的方向的话,你需要点击输入命令:rosrun turtlesim turtle_teleop_key的窗口才能唤醒小海龟,而不是点击小海龟的窗口唤醒小海龟。
总结
安装ROS的过程会产生很多与教程文章不同的问题,还好都可以根据报错信息去解决,只要静下心就可以成功。
小海龟的移动非常真实,它需要用前后键才能走动,左右键只能改变它的方向,这与平常玩的赛车游戏经验略有不同,同时也能感受它在现实移动的魅力,缺点是小海龟左右移动的偏角太大了,无法精确地控制。
参考文章:https://blog.csdn.net/qq_43279579/article/details/114291635
ROS安装与验证
这篇关于Ubuntu18.04下安装ROS日志及小海龟示例教程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




