本文主要是介绍ROS例程——小海龟仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
第一个ROS例程(小海龟仿真)
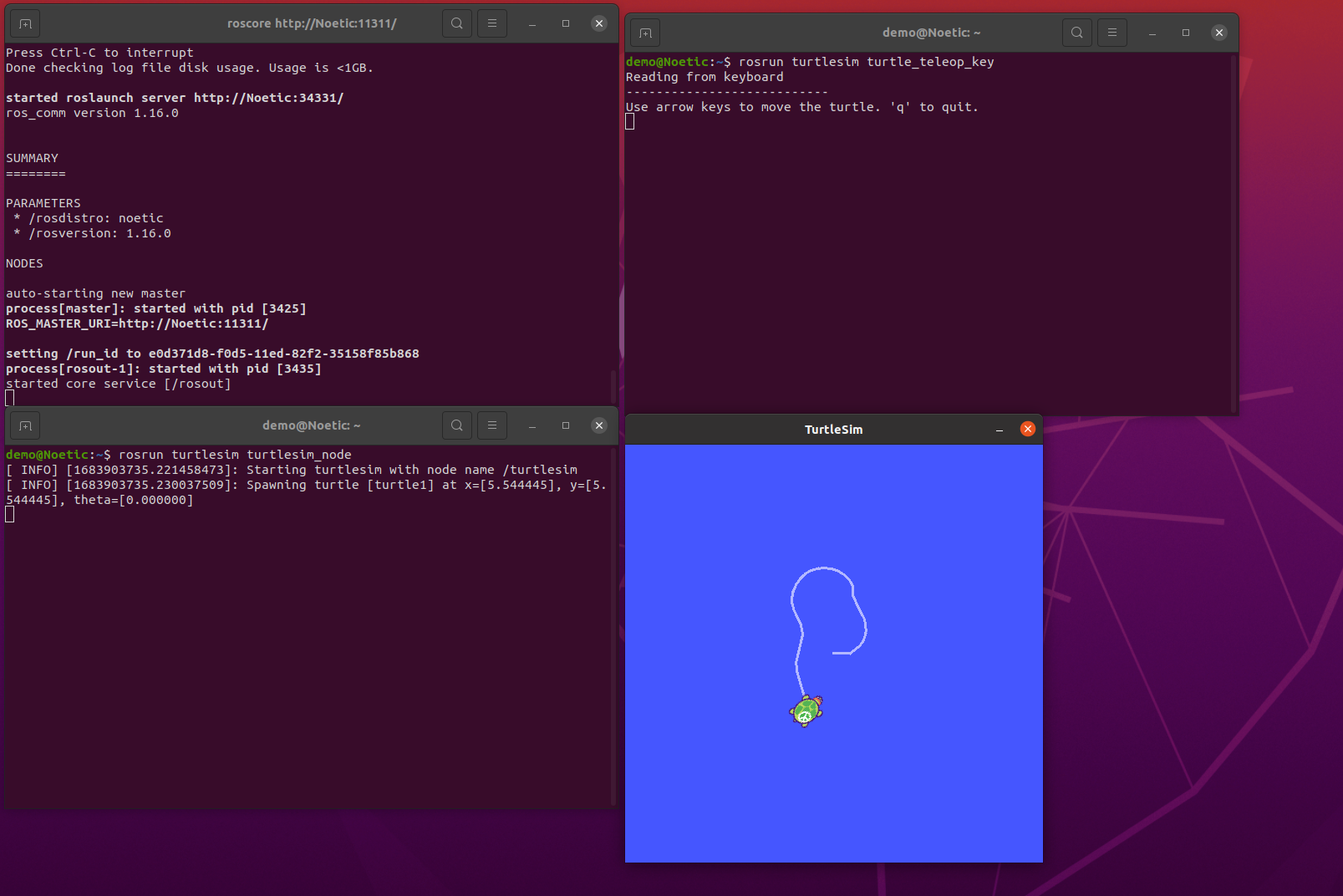
1. 启动ROS Master(第一个终端)
roscore
2. 启动小海龟仿真器(第二个终端)
rosrun turtlesim turrlesim_node
3. 启动海龟控制节点(第三个终端)
rosrun turtlesim turtle_teleop_key
4. 使用 rqt_graph 可视化工具参看计算图
rqt_graph

5. 使用rosnode list查看系统的节点
rosnode list

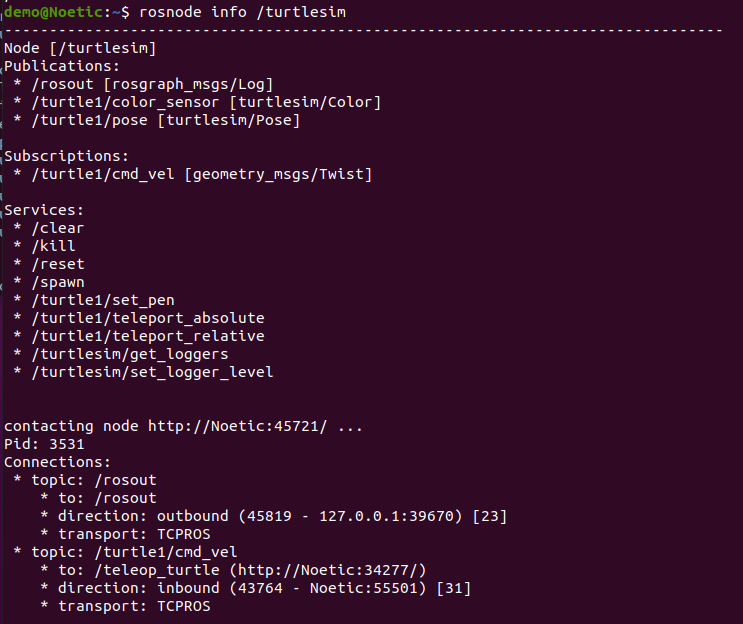
6. 使用 rosnode info 查看节点信息
rosnode info /turtlesim
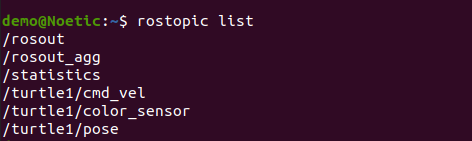
7. 使用 rostopic list 查看系统的发布/订阅话题
rostopic list
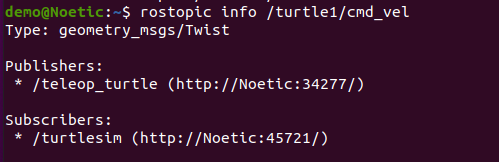
8. 使用 rosnode info 查看话题信息
rostopic info /turtle1/cmd_vel
9. 使用 rostopic echo 监听话题信息
rostopic echo /turtle1/cmd_vel

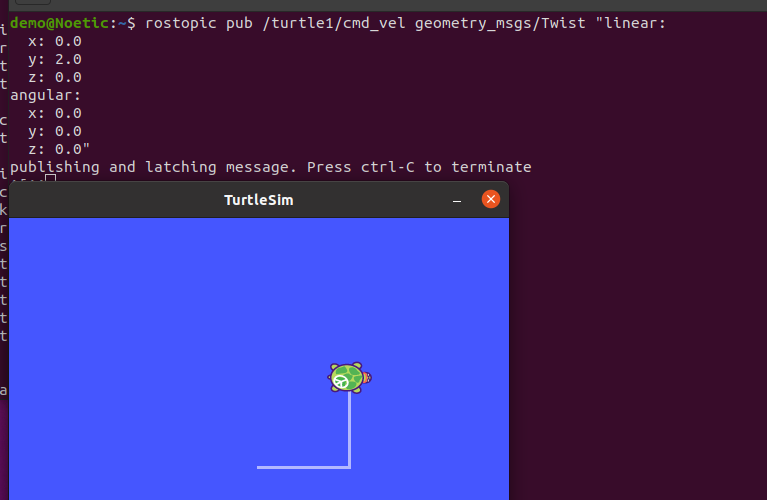
10. 使用 rostopic pub 来发布命令
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:x: 0.0y: 2.0z: 0.0
angular:x: 0.0y: 0.0z: 0.0"
11. 添加参数使其一直旋转
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
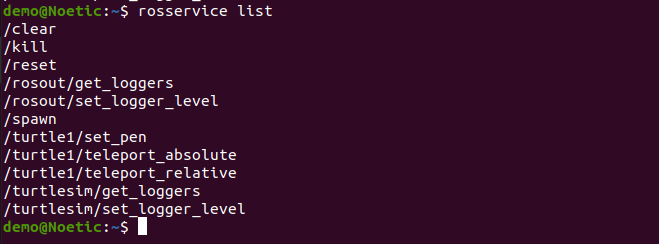
12. 使用 rosservice list 查看系统的服务
rosservice list
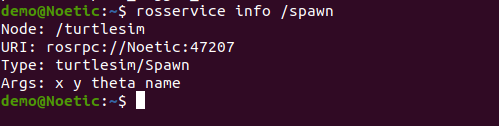
13. 使用 rosservice info 查看服务信息
rosservice info /spawn
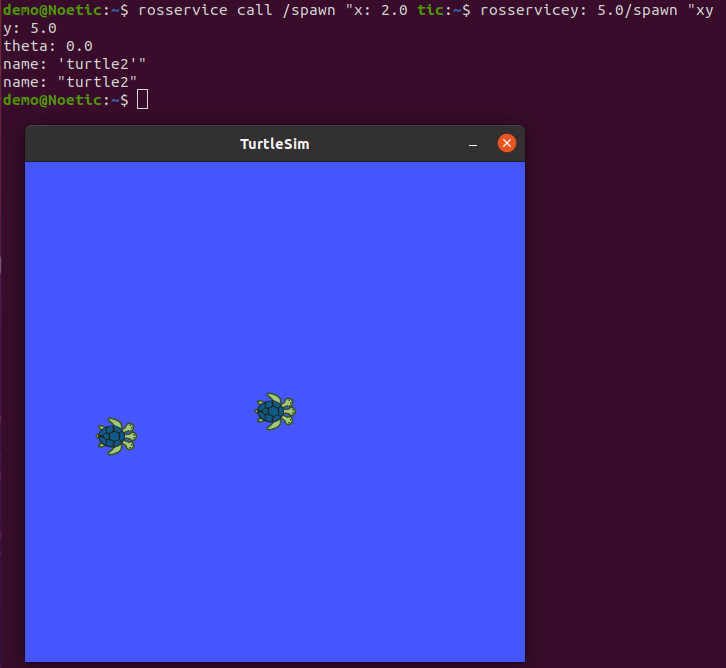
14. 使用 rosservice call 发布服务请求
rosservice call /spawn "x: 2.0
y: 5.0
theta: 0.0
name: 'turtle2'"
15. 使用 rqt_plot 可视化工具
rqt_plot
这篇关于ROS例程——小海龟仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





