实现目标专题

RT-DETR+Sort 实现目标跟踪
在前一篇博客中,博主介绍了利用YOLOv8与Sort算法实现目标跟踪,在今天这篇博客中,博主将利用RT-DETR算法与Sort算法相结合,从而实现目标跟踪。。 这里博主依旧是采用ONNX格式的模型文件来执行推理过程,由于Sort算法是基于检测懂得目标跟踪方法,因此我们只需要获取到检测结果即可,代码如下: import onnxruntime as ortsess= ort.Inference

Manim实现目标的移动和出现速度控制
一,介绍 缓动函数 自定义参数随时间变化的速率。 现实生活中,物体并不是突然启动或者停止, 当然也不可能一直保持匀速移动。就像我们 打开抽屉的过程那样,刚开始拉的那一下动作很快, 但是当抽屉被拉出来之后我们会不自觉的放慢动作。 或是掉落在地板上的物体,一开始下降的速度很快, 接着就会在地板上来回反弹直到停止。 这个页面将帮助你选择正确 速率函数的选择,即动画的速度曲线。 接下啦看看非标

python动画:实现目标的运动轨迹【paths】
一,介绍 在 Manim 库中,“路径(paths)”指的是一些功能函数,这些函数用于确定在点集之间进行变换时所需的路径。这些函数为动画制作提供了灵活性和表现力,使得物体在场景中的移动表现得更加生动和自然。 具体来说,路径函数能够根据给定的一组点,生成一条连贯的运动轨迹,控制物体在动画中的运动方式。例如,当你想让一个图形从一个位置移动到另一个位置时,简单的线性运动可能显得乏味,而使用路径函数则

YOLO+Sort实现目标追踪
在前面的目标检测、实例分割的学习中,我们多是对单张图像进行处理,而事实上在我们的实际应用中多数需要对视频进行操作,当然这个操作也是讲视频转换为一帧帧的图像,但博主发现在ultralytics这个算法平台中,针对视频的处理多调用track方法,即跟踪算法,比如在车辆测速、车辆测距等应用中,那么跟踪算法到底是如何实现的呢,这便是我们今天要学习的内容。 目标检测和目标跟踪的区别 目标检测:目标检测任

使用tensorflow object detection API实现目标检测
环境 Windows7 x64 conda 4.3.30 1、TensorFlow安装 首先在conda中创建TensorFlow环境 conda create -n tensorflow python=3.6.2 激活tensorflow环境 activate tensorflow 安装tensorflow pip install tensorflow==1.12.0 安
DETR实现目标检测(一)-训练自己的数据集
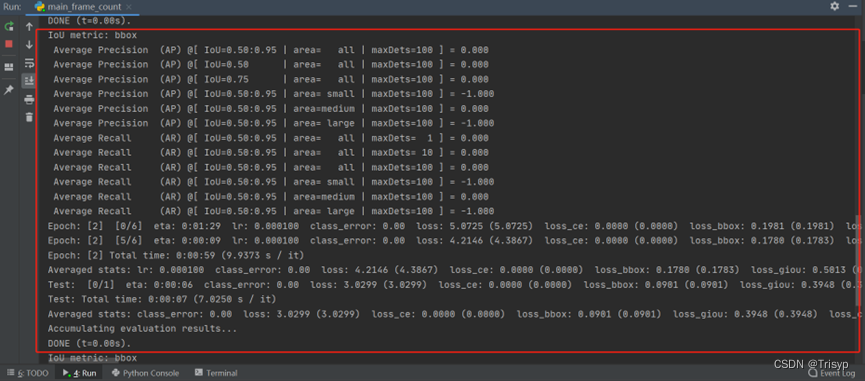
1、DETR架构 DETR(Detection Transformer)是一种新型的目标检测模型,由Facebook AI Research (FAIR) 在2020年提出。DETR的核心思想是将目标检测任务视为一个直接的集合预测问题,而不是传统的两步或多步预测问题。这种方法的创新之处在于它直接预测目标的类别和边界框,而不是先生成大量的候选区域,然后再对这些区域进行分类和边界框回归。 DERT
Pytorch 实现目标检测二(Pytorch 24)
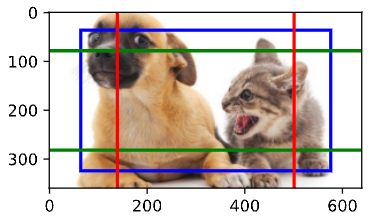
一 实例操作目标检测 下面通过一个具体的例子来说明锚框标签。我们已经为加载图像中的狗和猫定义了真实边界框,其中第一个 元素是类别(0代表狗,1代表猫),其余四个元素是左上角和右下角的(x, y)轴坐标(范围介于0和1之间)。我 们还构建了五个锚框,用左上角和右下角的坐标进行标记:A0, . . . , A4(索引从0开始)。然后我们在图像中 绘制这些真实边界框和锚框。 ground_truth

Pytorch 实现目标检测一(Pytorch 23)
一 目标检测和边界框 在图像分类任务中,我们假设图像中只有一个主要物体对象,我们只关注如何识别其类别。然而,很多时候图像里有多个我们感兴趣的目标,我们不仅想知 道它们的类别,还想得到它们在图像中的具体位置。在计算机视觉里,我们将这类任务称为 目标检测(object detection)或目标识别(object recognition)。 目标检测在多个领域中被广泛使用。例如,在无人驾驶里,我们
[深度学习]yolov10+deepsort+pyqt5实现目标追踪
YOLOv10+DeepSORT+PyQt5实现目标追踪系统 在现代智能监控系统中,目标追踪技术扮演着至关重要的角色。结合YOLOv10(一种先进的实时目标检测算法)与DeepSORT(一种多目标追踪算法),并通过PyQt5构建用户界面,我们可以开发出一套高效、直观的目标追踪系统。 YOLOv10以其出色的检测速度和准确性,在实时视频流中快速识别出目标物体。而DeepSORT算法则进一步提高了

【OpenVINO™】在C#中使用 OpenVINO™ 部署 YOLOv10 模型实现目标
文章目录 1. 前言1.1 OpenVINO™ C# API1.2 YOLOv10 2. 模型获取2.1 源码下载2.2 配置环境2.3 下载模型 3. Yolov10 项目配置3.1 项目创建与环境配置3.2 定义模型预测方法3.2.1 定义目标检测模型方法3.2.2 使用OpenVINO™ 预处理接口编译模型 3.2 模型预测方法调用 4. 项目运行与演示4.1 项目编译和运行4.2 Y
Yolov8项目实践——基于yolov8与OpenCV实现目标物体运动热力图
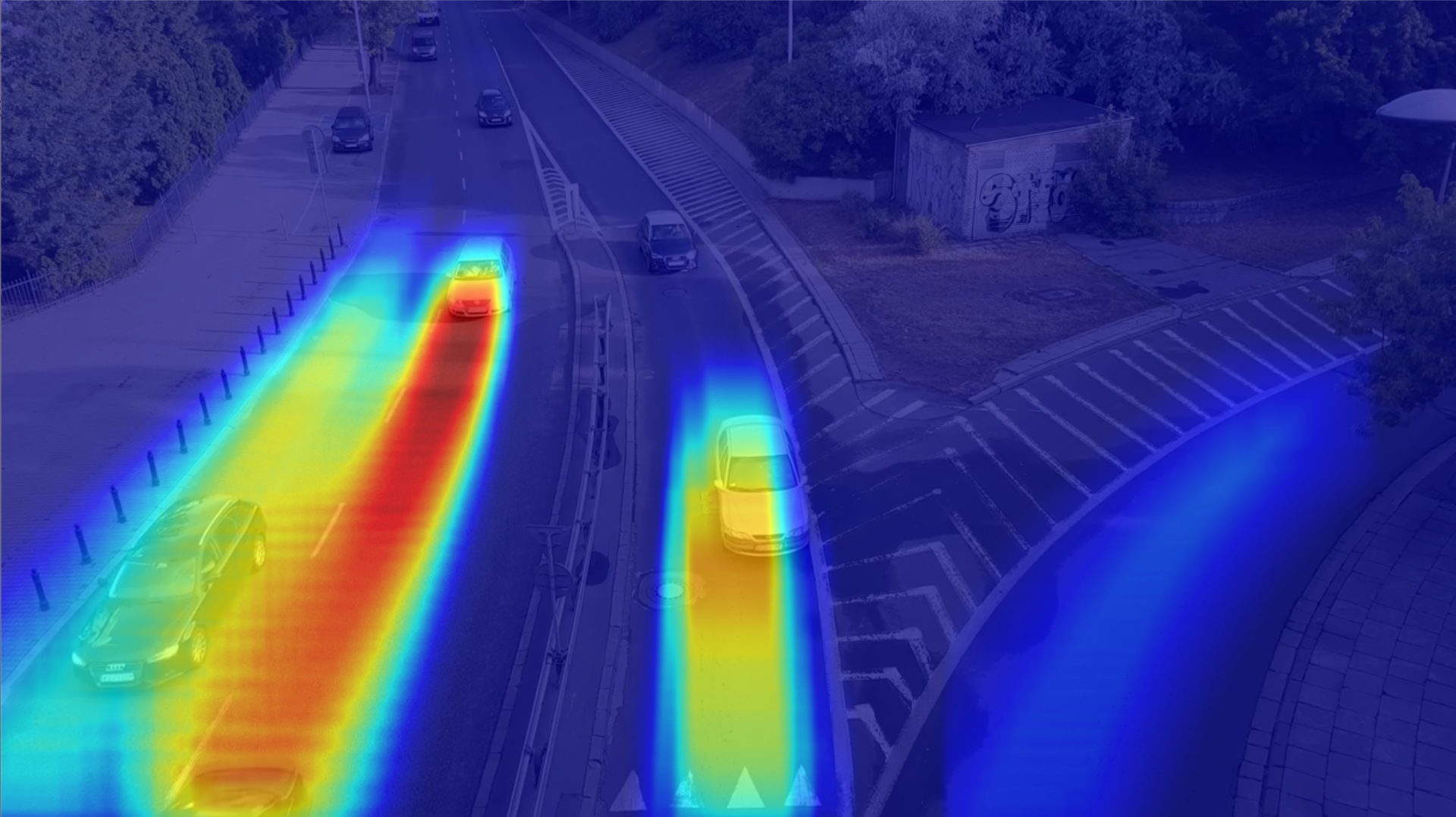
概述 在数据驱动和定位的世界中,对数据进行解释、可视化和决策的能力变得日益重要。这表明,使用正确的工具和技术可能是项目成功的关键。在计算机视觉领域,存在许多技术来解释从视频(包括录像、流媒体或实时视频)中获取的数据,特别是在评估需要分析交通强度或某些对象(如人、车辆、动物等)行为的区域时,热力图是一个极其有效的选择。 物体运动热力图可以展示物体在一段时间内的运动轨迹和活动强度。这种图表通常通过

教你用10行Python代码实现目标检测(附代码)
来源:大数据文摘 本文约2729字,建议阅读6分钟。 本文介绍了一个名为ImageAI 的Python库,集成了现今流行的深度学习框架和计算机视觉库,手把手教你构建自己的目标检测应用。 后台回复“0706”,可获取代码和模型文件。 短短10行代码就可以实现目标检测?! 本文作者和他的团队构建了一个名为ImageAI 的Python库,集成了现今流行的深度学习框架和计算机视觉库。本文将
DeepSort行人车辆识别系统(实现目标检测+跟踪+统计)
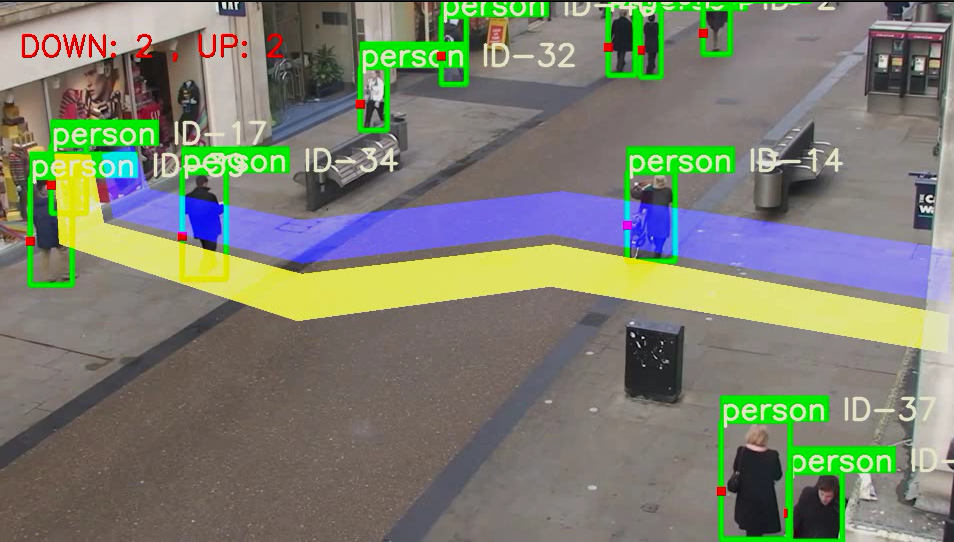
文章目录 1、前言2、源项目实现功能3、运行环境4、如何运行5、运行结果6、遇到问题7、使用框架8、目标检测系列文章 1、前言 1、本文基于YOLOv5+DeepSort的行人车辆的检测,跟踪和计数。 2、该项目是基于github的黄老师傅,黄老师傅的项目输入视频后,直接当场利用cv2.imshow(),查看识别的结果, 无法当场保存检测完视频,而且无法在服务器上跑,本文实现保

OpenCV图像处理——基于OpenCV的ORB算法实现目标追踪
概述 ORB(Oriented FAST and Rotated BRIEF)算法是高效的关键点检测和描述方法。它结合了FAST(Features from Accelerated Segment Test)算法的快速关键点检测能力和BRIEF(Binary Robust Independent Elementary Features)算法的征描述能力,使得ORB在处理图像时既快速又准确。 关

【PyTorch实战演练】Faster R-CNN介绍以及通过预训练模型30行代码实现目标检测
文章目录 0. 前言1. R-CNN的发展史1.1 R-CNN1.2 Fast R-CNN1.3 Faster R-CNN 2. 预训练模型3. 目标检测代码及解析4. 结果展示 0. 前言 按照国际惯例,首先声明:本文只是我自己学习的理解,虽然参考了他人的宝贵见解及成果,但是内容可能存在不准确的地方。如果发现文中错误,希望批评指正,共同进步。 本文介绍Faster
SEO站群工具箱,助你实现目标
SEO(Search Engine Optimization)是指通过优化网站结构和内容,提高网站在搜索引擎中的排名,从而增加网站流量和曝光度的一种技术手段。而站群则是指利用多个网站来实现SEO目标的一种策略。如果你想在竞争激烈的网络世界中脱颖而出,那么SEO站群程序工具箱将是你实现这一目标的得力助手。 1.专业化管理:SEO站群程序工具箱提供了全方位的管理功能,让你可以轻松管理多个网站。不再需
[C++]C++使用yolov9结合bytetrack实现目标追踪演示
【简介】 在C++中实现YOLOv9的目标检测与ByteTrack的多目标追踪是一个相对复杂的过程,涉及到深度学习、计算机视觉和实时数据处理等多个领域。下面我将简单介绍这两个技术,并概述如何在C++中实现它们。 YOLOv9(You Only Look Once,版本9)是一种实时目标检测算法,它通过在单个网络中同时预测所有目标的位置和类别来实现高效的目标检测。YOLOv9在速度和精度之间取得

OpenCV实现目标追踪
目录 准备工作 语言: 软件包: 效果演示 代码解读 (1)导入OpenCV库 (2)使用 cv2.VideoCapture 打开指定路径的视频文件 (3)使用 vid.read() 读取视频的第一帧,ret 表示是否成功读取,fr 包含实际的视频帧 (4)弹出一个窗口,然后我们通过拖动鼠标选择需要跟踪的区域(ROI)。选择的ROI作为一个元组(initial_box)返回,表示
[深度学习]yolov9+bytetrack+pyqt5实现目标追踪
【简介】 目标追踪简介 目标追踪是计算机视觉领域中的一个热门研究方向,它涉及到从视频序列中实时地、准确地跟踪目标对象的位置和运动轨迹。随着深度学习技术的快速发展,基于深度学习的目标追踪方法逐渐展现出强大的性能。其中,YOLOv9(You Only Look Once的第九个版本)作为一种先进的目标检测算法,因其高精度和实时性而受到广泛关注。 YOLOv9介绍 YOLOv9是YOLO系列算法

SMART - 实现目标任务的5种方法
人们总是喜欢给自己设定目标,但是设定目标并不是就可以实现,这需要专注于目标,并采用合适的方法才能实现它 SMART就是其中一种很流行的方法,它来自于咨询领域,SMART代表的是: 具体的(Specific) 可度量的(Measurable) 可实现的(Achievable) 相关的(Relevant) 时间可控的(Time-boxed) 对于任何问题,原则上都需要制定计划,技

超详细概述YOLOV8实现目标追踪任务全解析
目录 yolov8导航 YOLOv8(附带各种任务详细说明链接) 搭建环境说明 概述 可用的追踪器 BoT-SORT botsort.yaml参数说明 ByteTrack bytetrack.yaml参数说明 直接使用框架输出追踪结果 导入库和加载模型 使用模型进行追踪 其他细节 追踪效果展示 目标检测追踪效果展示: 实例分割追踪效果展示: 姿态检测最总效果

FPGA入门者必读宝典:详述开发流程每一环节的物理含义和实现目标
要知道,要把一件事情做好,不管是做哪们技术还是办什么手续,明白这个事情的流程非常关键,它决定了这件事情的顺利进行与否。同样,我们学习FPGA开发数字系统这个技术,先撇开使用这个技术的基础编程语言的具体语法、使用工具和使用技巧不谈,咱先来弄清楚FPGA的开发流程是什么。 本文引用地址:http://www.eepw.com.cn/article/279347.htm FPGA的开发流程是遵循

抓取微信信息的神器,助你实现目标!
微信作为中国最大的社交媒体平台之一,拥有数亿用户,其中蕴含着大量的信息和数据。然而,想要抓取微信相关的信息并不是一件容易的事情。那么,有没有什么软件能够帮助我们实现这个目标呢?下面小编将为您介绍几款实用的软件。 1.微信群爬虫:这是一款专为微信群聊信息抓取而设计的软件。通过输入关键词或者指定群聊名称,该软件可以帮助用户快速抓取群聊中的文字、图片、语音等信息,并进行整理和导出。 2.微信公众号爬
实现目标检测中的数据格式自由(labelme json、voc、coco、yolo格式的相互转换)
在进行目标检测任务中,存在labelme json、voc、coco、yolo等格式。labelme json是由anylabeling、labelme等软件生成的标注格式、voc是通用目标检测框(mmdetection、paddledetection)所支持的格式,coco是通用目标检测框(mmdetection、paddledetection)所支持的格式,yolo格式是yolo系列项目中所支
AI项目十九:YOLOV8实现目标追踪
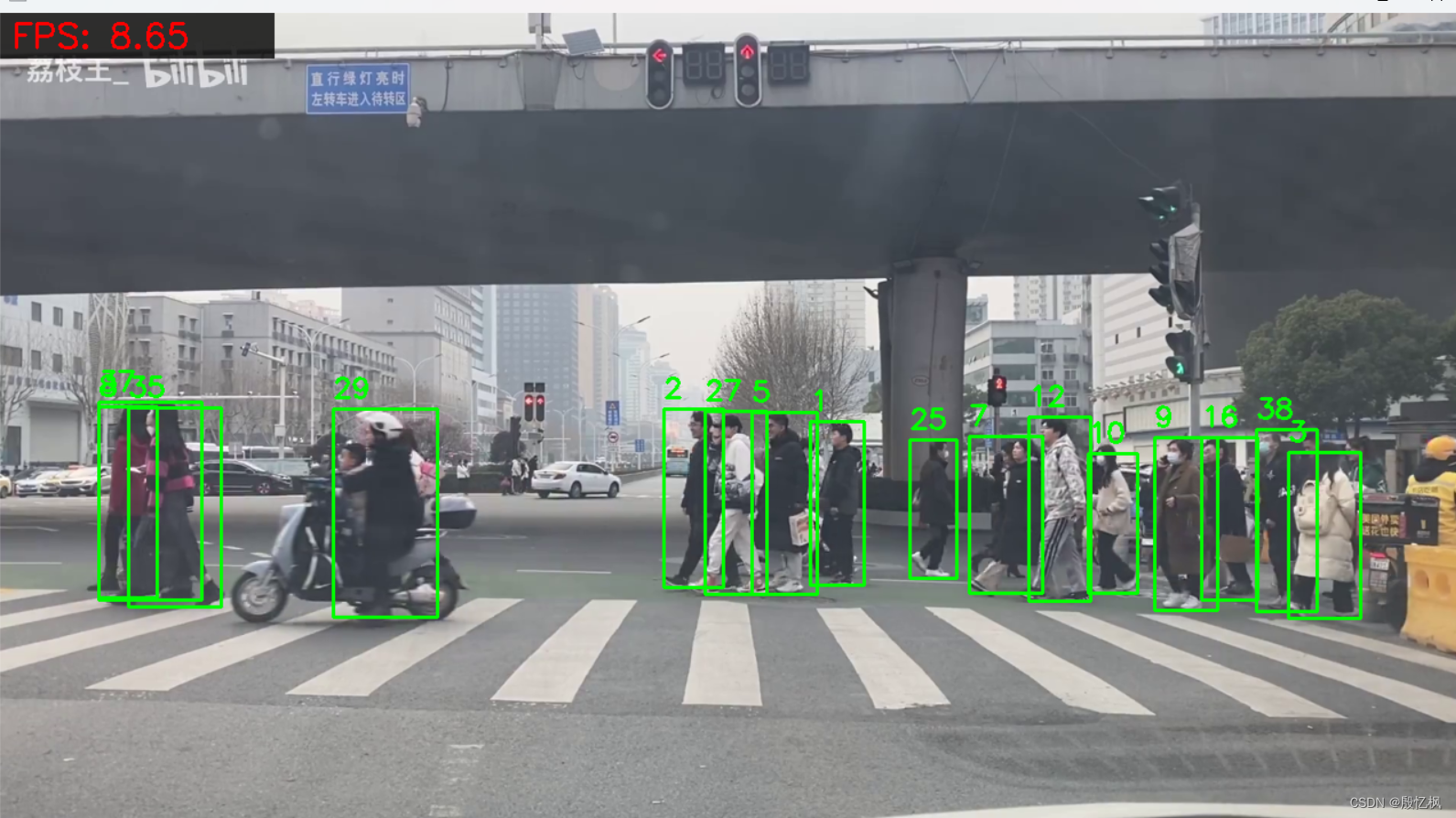
若该文为原创文章,转载请注明原文出处。 主要是学习一下实现目标追踪的原理,并测试一下效果。 目的是通过YOLOV8实现人员检测,并实现人员追踪,没个人员给分配一个ID,实现追踪的效果。 也可以统计人数。在小区办公楼的出入场所,这类很常见。 一、简介 追踪任务是指识别和跟踪特定目标在视频序列中的运动和位置,一般用唯一ID或固定颜色检测框表示),如下图: 目标检测和目标跟踪的区别:目标

opencv——实现目标模板匹配
#include <opencv2\opencv.hpp>#include <stdio.h>int main( int agrc,char* argv[]){//templat为目标模板图像,为彩色图像IplImage* templat = cvLoadImage("1.jpg",1);//src为被搜索图像,也为彩色图像IplImage* src = cvLoadImage(