本文主要是介绍AI项目十九:YOLOV8实现目标追踪,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
若该文为原创文章,转载请注明原文出处。
主要是学习一下实现目标追踪的原理,并测试一下效果。
目的是通过YOLOV8实现人员检测,并实现人员追踪,没个人员给分配一个ID,实现追踪的效果。
也可以统计人数。在小区办公楼的出入场所,这类很常见。
一、简介
追踪任务是指识别和跟踪特定目标在视频序列中的运动和位置,一般用唯一ID或固定颜色检测框表示),如下图:

目标检测和目标跟踪的区别:
目标检测:目标检测任务要求同时完成对象的定位(即确定对象的边界框位置)和分类(即确定对象的类别)。这意味着目标检测算法必须不仅能够确定对象是否存在,还要知道它是什么。
目标检测通常用于识别和定位图像或视频帧中的对象,通常需要明确的目标类别信息。
目标跟踪:目标跟踪任务更关注对象在帧与帧之间的连续性,通常更注重对象的运动特征,而不要求进行目标的分类。
目标跟踪可以不涉及目标的类别,它的主要目标是维护对象的位置和轨迹,以实现在视频序列中的跟踪。
这里就有个问题,视频中不同时刻的同一个人,位置发生了变化,那么是如何关联上的呢?答案就是匈牙利算法和卡尔曼滤波。
- 匈牙利算法可以告诉我们当前帧的某个目标,是否与前一帧的某个目标相同。
- 卡尔曼滤波可以基于目标前一时刻的位置,来预测当前时刻的位置,并且可以比传感器(在目标跟踪中即目标检测器,比如Yolo等)更准确的估计目标的位置。
最经典的是DeepSORT,本篇记录的是如何使用IOU,所以了解下DeepSORT。
DeepSORT对每一帧的处理流程如下:
检测器得到bbox → 生成detections → 卡尔曼滤波预测→ 使用匈牙利算法将预测后的tracks和当前帧中的detecions进行匹配(级联匹配和IOU匹配) → 卡尔曼滤波更新
Frame 0:检测器检测到了3个detections,当前没有任何tracks,将这3个detections初始化为tracks
Frame 1:检测器又检测到了3个detections,对于Frame 0中的tracks,先进行预测得到新的tracks,然后使用匈牙利算法将新的tracks与detections进行匹配,得到(track, detection)匹配对,最后用每对中的detection更新对应的track
二、方法介绍
目前主流的目标跟踪算法都是基于Tracking-by-Detecton策略,即基于目标检测的结果来进行目标跟踪。
实现目标跟踪的方法:
1、IOU
比较前后两帧检测框IOU是否大于指定阈值,是则是同一个物体,不是则分配新ID,此方法对于运动慢的可以,效果差。
2、卡尔曼滤波
卡尔曼滤波是一种用于估计系统状态的优秀算法。它结合了传感器测量和系统模型,通过递归地计算加权平均值,实时更新状态估计。卡尔曼滤波在众多领域,如导航、机器人技术和信号处理中广泛应用,以提高系统的准确性和鲁棒性。
可以用的库:GitHub - adipandas/multi-object-tracker: Multi-object trackers in Python
3、botsort&bytetrack
BoT-SORT是今年非常游戏的跟踪器模型。就所有主要 MOT 指标MOTA、IDF1 和 HOTA而言,BoT-SORT 和 BoT-SORT-ReID 在 MOT17 和 MOT20 测试集的 MOTChallenge数据集中排名第一。对于 MOT17:实现了 80.5 MOTA、80.2 IDF1 和 65.0 HOTA,在跟踪器的排行榜上暂居第一。
论文翻译:https://blog.csdn.net/hhhhhhhhhhwwwwwwwwww/article/details/126890651
论文链接:https://arxiv.org/pdf/2206.14651.pdf
代码:https://github.com/NirAharon/BOT-SORT
ByteTrack是基于tracking-by-detection范式的跟踪方法。大多数多目标跟踪方法通过关联分数高于阈值的检测框来获取目标ID。对于检测分数较低的目标,例如遮挡目标,会被简单的丢弃,这带来了不可忽略的问题,包括大量的漏检和碎片化轨迹。为了解决该问题,作者提出了一种简单、高效且通用的数据关联方法BYTE,通过关联每个检测框而不仅仅是高分检测框来进行跟踪。对于低分检测框,利用它们与轨迹的相似性来恢复真实目标并过滤掉背景检测。
BoT-SORT:https://github.com/NirAharon/BoT-SORT
ByteTrack :https://github.com/ifzhang/ByteTrack
三、IOU实现目标追踪
1、环境安装
本人的电脑使用的是CPU(无GPU)版本,所以直接安装,GPU需要安装CUDA等,自行安装。
# 使用Conda为本项目单独创建一个虚拟环境(python 3.8版本)
conda create -n yolov8_env python=3.8
# 激活进入环境
conda activate yolov8_env# YOLOv8安装方式
pip install ultralytics
2、验证
# 图片cli验证
yolo predict model=yolov8n.pt source=./bus.jpg# 视频cli验证
yolo predict model=yolov8n.pt source=./test.mp4
3、使用python验证
使用python语言验证主要是熟悉YOLOV8的API,知道如何调用,并测试。
from ultralytics import YOLO
import cv2
import numpy as np
import time# 加载模型
model = YOLO("./yolov8n.pt") # load a pretrained model (recommended for training)
objs_labels = model.names # get class labels
print(objs_labels)# 打开摄像头
cap = cv2.VideoCapture(0)while True:# 读取一帧start_time = time.time()ret, frame = cap.read()if ret:# 检测result = list(model(frame, stream=True))[0] # inference,如果stream=False,返回的是一个列表,如果stream=True,返回的是一个生成器boxes = result.boxes # Boxes object for bbox outputsboxes = boxes.cpu().numpy() # convert to numpy array# 遍历每个框for box in boxes.data:l,t,r,b = box[:4].astype(np.int32) # left, top, right, bottomconf, id = box[4:] # confidence, class# 绘制框cv2.rectangle(frame, (l,t), (r,b), (0,0,255), 2)# 绘制类别+置信度(格式:98.1%)cv2.putText(frame, f"{objs_labels[id]} {conf*100:.1f}%", (l, t-10), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)end_time = time.time()fps = 1 / (end_time - start_time)# 绘制FPScv2.putText(frame, f"FPS: {fps:.2f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)# 显示cv2.imshow("frame", frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakelse:break在终端里执行python demo.py

4、IOU实现追踪
'''
iou追踪示例
'''
from ultralytics import YOLO
import cv2
import numpy as np
import time
import random
import os
from shapely.geometry import Polygon, LineString
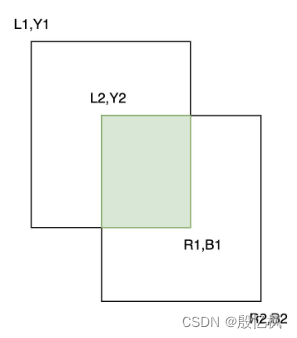
import jsonclass IouTracker:def __init__(self):# 加载检测模型self.detection_model = YOLO("./yolov8n.pt") # 获取类别 self.objs_labels = self.detection_model.names # 打印类别print(self.objs_labels)# 只处理personself.track_classes = {0: 'person'}# 追踪的IOU阈值self.sigma_iou = 0.5# detection thresholdself.conf_thresh = 0.3def iou(sel,bbox1, bbox2):"""计算两个bounding box的IOU"""(x0_1, y0_1, x1_1, y1_1) = bbox1(x0_2, y0_2, x1_2, y1_2) = bbox2# 计算重叠的矩形的坐标overlap_x0 = max(x0_1, x0_2)overlap_y0 = max(y0_1, y0_2)overlap_x1 = min(x1_1, x1_2)overlap_y1 = min(y1_1, y1_2)# 检查是否有重叠if overlap_x1 - overlap_x0 <= 0 or overlap_y1 - overlap_y0 <= 0:return 0# 计算重叠矩形的面积以及两个矩形的面积size_1 = (x1_1 - x0_1) * (y1_1 - y0_1)size_2 = (x1_2 - x0_2) * (y1_2 - y0_2)size_intersection = (overlap_x1 - overlap_x0) * (overlap_y1 - overlap_y0)size_union = size_1 + size_2 - size_intersection# 计算IOUreturn size_intersection / size_uniondef predict(self, frame):'''检测'''result = list(self.detection_model(frame, stream=True, conf=self.conf_thresh))[0] # inference,如果stream=False,返回的是一个列表,如果stream=True,返回的是一个生成器boxes = result.boxes # Boxes object for bbox outputsboxes = boxes.cpu().numpy() # convert to numpy arraydets = [] # 检测结果# 遍历每个框for box in boxes.data:l,t,r,b = box[:4] # left, top, right, bottomconf, class_id = box[4:] # confidence, class# 排除不需要追踪的类别if class_id not in self.track_classes:continuedets.append({'bbox': [l,t,r,b], 'score': conf, 'class_id': class_id })return detsdef main(self):'''主函数'''# 读取视频cap = cv2.VideoCapture("./media/video.mp4")# 获取视频帧率、宽、高fps = cap.get(cv2.CAP_PROP_FPS)width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))print(f"fps: {fps}, width: {width}, height: {height}")tracks_active = [] # 活跃的跟踪器frame_id = 1 # 帧IDtrack_idx = 1 # 跟踪器ID# writerout = cv2.VideoWriter("./test_out.mp4", cv2.VideoWriter_fourcc(*'mp4v'), fps, (1280, 720))while True:# 读取一帧start_time = time.time()ret, raw_frame = cap.read()if ret:# 检测frame = cv2.resize(raw_frame, (1280, 720))raw_frame = framedets = self.predict(raw_frame)# 更新后的跟踪器updated_tracks = [] # 遍历活跃的跟踪器for track in tracks_active:if len(dets) > 0:# 根据最大IOU更新跟踪器,先去explain.ipynb中看一下MAX用法best_match = max(dets, key=lambda x: self.iou(track['bboxes'][-1], x['bbox'])) # 找出dets中与当前跟踪器(track['bboxes'][-1])最匹配的检测框(IOU最大)# 如果最大IOU大于阈值,则将本次检测结果加入跟踪器if self.iou(track['bboxes'][-1], best_match['bbox']) > self.sigma_iou:# 将本次检测结果加入跟踪器track['bboxes'].append(best_match['bbox'])track['max_score'] = max(track['max_score'], best_match['score'])track['frame_ids'].append(frame_id)# 更新跟踪器updated_tracks.append(track)# 删除已经匹配的检测框,避免后续重复匹配以及新建跟踪器del dets[dets.index(best_match)]# 如有未分配的目标,创建新的跟踪器new_tracks = []for det in dets: # 未分配的目标,已经分配的目标已经从dets中删除new_track = {'bboxes': [det['bbox']], # 跟踪目标的矩形框'max_score': det['score'], # 跟踪目标的最大score'start_frame': frame_id, # 目标出现的 帧id'frame_ids': [frame_id], # 目标出现的所有帧id'track_id': track_idx, # 跟踪标号'class_id': det['class_id'], # 类别'is_counted': False # 是否已经计数}track_idx += 1new_tracks.append(new_track)# 最终的跟踪器tracks_active = updated_tracks + new_trackscross_line_color = (0,255,0) # 越界线的颜色# 绘制跟踪器for tracker in tracks_active:# 绘制跟踪器的矩形框l,t,r,b = tracker['bboxes'][-1]# 取整l,t,r,b = int(l), int(t), int(r), int(b)class_id = tracker['class_id']cv2.rectangle(raw_frame, (l,t), (r,b), cross_line_color, 2)# 绘制跟踪器的track_id + class_name + score(99.2%格式)cv2.putText(raw_frame, f"{tracker['track_id']}", (l, t-10), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0,255,0), 2)# 设置半透明color = (0,0,0)alpha = 0.2l,t = 0,0r,b = l+240,t+40raw_frame[t:b,l:r,0] = raw_frame[t:b,l:r,0] * alpha + color[0] * (1-alpha)raw_frame[t:b,l:r,1] = raw_frame[t:b,l:r,1] * alpha + color[1] * (1-alpha)raw_frame[t:b,l:r,2] = raw_frame[t:b,l:r,2] * alpha + color[2] * (1-alpha)# end timeend_time = time.time()# FPSfps = 1 / (end_time - start_time)# 绘制FPScv2.putText(raw_frame, f"FPS: {fps:.2f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)# 显示cv2.imshow("frame", raw_frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakout.write(raw_frame)else:breakout.release() # 实例化
iou_tracker = IouTracker()
# 运行
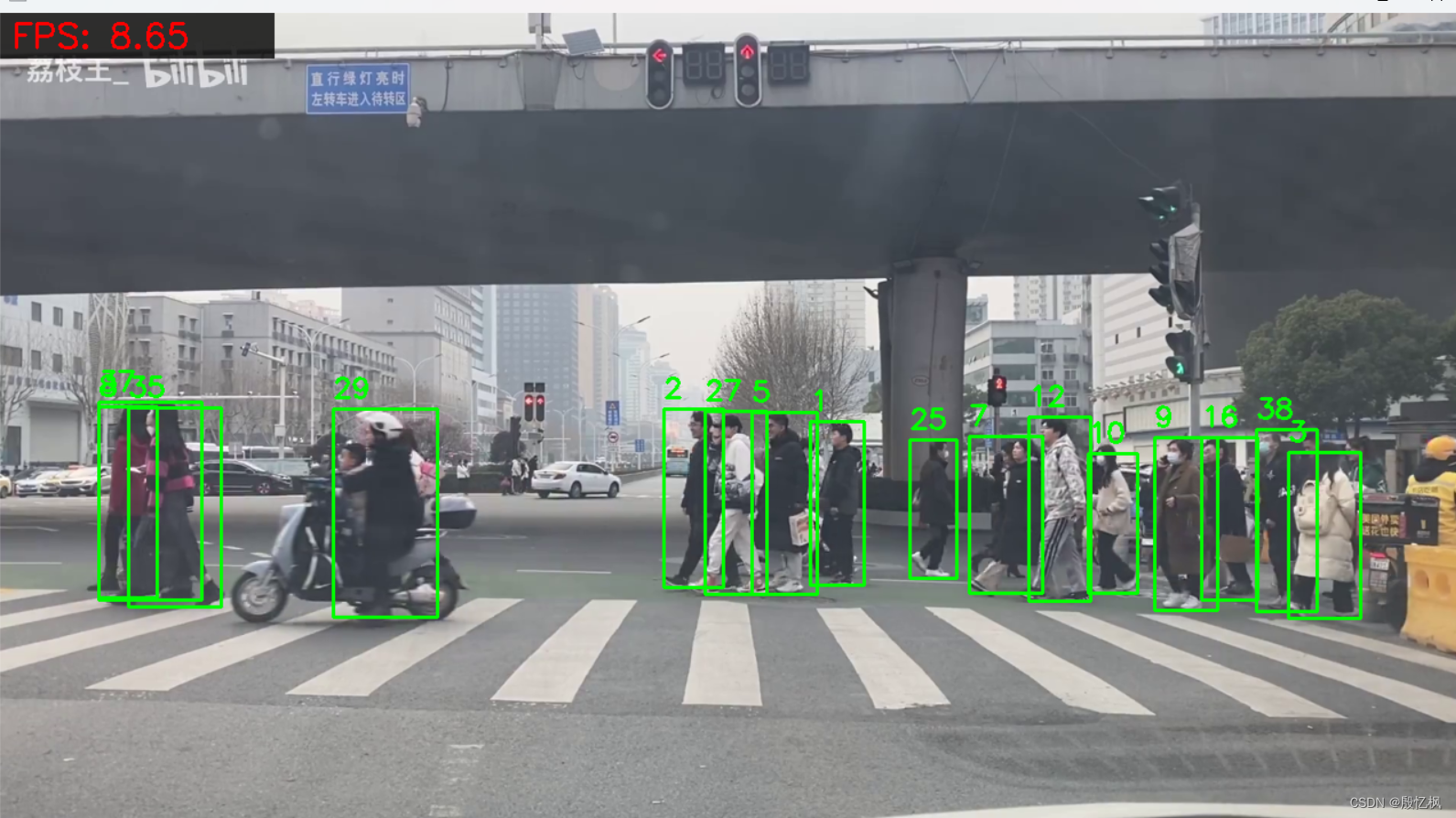
iou_tracker.main()测试效果,视频是马路上的,如果想要效果好,建议自己训练模型,使用的是yolov8n.pt模型
如有侵权,或需要完整代码,请及时联系博主。
这篇关于AI项目十九:YOLOV8实现目标追踪的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








