回环专题

61.以太网数据回环实验(4)以太网数据收发器发送模块
(1)状态转移图: (2)IP数据包格式: (3)UDP数据包格式: (4)以太网发送模块代码: module udp_tx(input wire gmii_txc ,input wire reset_n ,input wire tx_start_en , //以太网开始发送信

60.以太网数据回环实验(3)以太网数据收发器接收模块
(1)状态设计: ST_IDLE :空闲状态ST_PREAMBLE :前导码+帧起始界定符ST_ETH_HEAD :以太网帧头:目标MAC地址+源MAC地址+类型/长度ST_IP_HEAD :IP首部ST_UDP_HEAD :UDP首部(8个字节)ST_RX_DATA :接收数据状态ST_RX_DONE

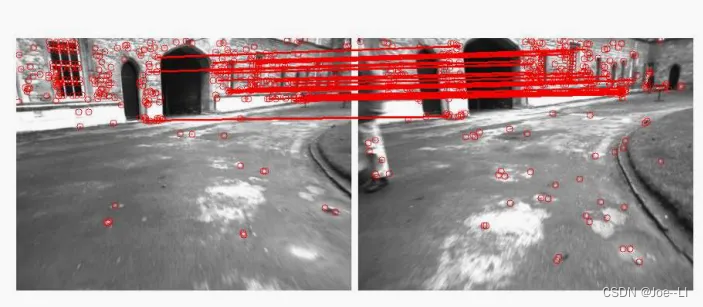
segMatch:基于3D点云分割的回环检测
该论文的地址是:https://arxiv.org/pdf/1609.07720.pdf segmatch是一个提供车辆的回环检测的技术,使用提取和匹配分割的三维激光点云技术。分割的例子可以在下面的图片中看到。 该技术是基于在车辆附近提取片段(例如车辆、树木和建筑物的部分),并将这些片段与从目标地图中提取的片段相匹配。分段匹配可以直接转化为精确的定位信息,从而实现精确的三维地图构造和定位。

SC-A-LOAM:在A-LOAM中加入回环检测
Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts. 代码:https://github.com/gisbi-kim/SC-A-LOAM 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识
![[FreeRTOS 功能应用] 互斥访问与回环队列 功能应用](https://img-blog.csdnimg.cn/direct/403c4b37dabf462686870e9c049e137f.png)
[FreeRTOS 功能应用] 互斥访问与回环队列 功能应用
文章目录 一、基础知识点二、代码讲解三、结果演示四、代码下载 一、基础知识点 [FreeRTOS 基础知识] 互斥访问与回环队列 概念 [FreeRTOS 内部实现] 互斥访问与回环队列 [FreeRTOS 内部实现] 创建任务 xTaskCreate函数解析 本实验是基于STM32F103开发移植FreeRTOS实时操作系统,实现多任务同时读写队列数据操作。 使用工具:

【FPGA项目】bin文件ram存取回环测试
🎉欢迎来到FPGA专栏~bin文件ram存取回环测试 ☆* o(≧▽≦)o *☆嗨~我是小夏与酒🍹 ✨博客主页:小夏与酒的博客 🎈该系列文章专栏:FPGA学习之旅 文章作者技术和水平有限,如果文中出现错误,希望大家能指正🙏📜 欢迎大家关注! ❤️ 🎉 目录-bin文件ram存取回环测试 一、效果演示🥝演示视频🥝结果分析 二、说明三、bin文件的生成🔸bin

虚拟声卡实现音频回环
虚拟声卡实现音频回环 一、电脑扬声器播放声音路由到麦克风1. Voicemeeters安装设置2. 音频设备选择 二、回声模拟 一、电脑扬声器播放声音路由到麦克风 1. Voicemeeters安装设置 2. 音频设备选择 以腾讯会议为例 二、回声模拟 选中物理输入设备“Stereo Input 1”和物理输出设备“HARDWARE OUT”即可

开源SLAM框架学习——OpenVSLAM源码解析:全局优化模块(global optimization module):回环检测、pose-graph优化、global-BA优化
这篇博客主要介绍OpenVSLAM的全局优化模块(global_optimization_module),该模块是单独运行在一个线程中的。它主要执行的工作是:SLAM的回环检测,以及回环成功之后的回环矫正,还包括紧随着回环检测成功之后的pose graph优化和全局的BA优化。 1.全局优化模块入口 说是全局优化模块,其实也就是一个普通的类。对于类,第一步肯定就是实例化构造对象,全局优化模块的
【雅特力AT32】串口UART、USART配置和使用方法,数组的阻塞发送函数编写,串口接收中断、回环、重定向
【雅特力AT32】串口UART、USART配置和使用方法,数组的阻塞发送函数编写,串口接收中断、回环、重定向 文章目录 串口配置阻塞发送函数接收中断和串口回环串口重定向附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作SysTick系统定时器精准延时延时函数阻塞延时非阻塞延时 位带操作位带代码位带宏定义总线函数 一、位带操作理论及实践二、如何判断MCU的外设是否支
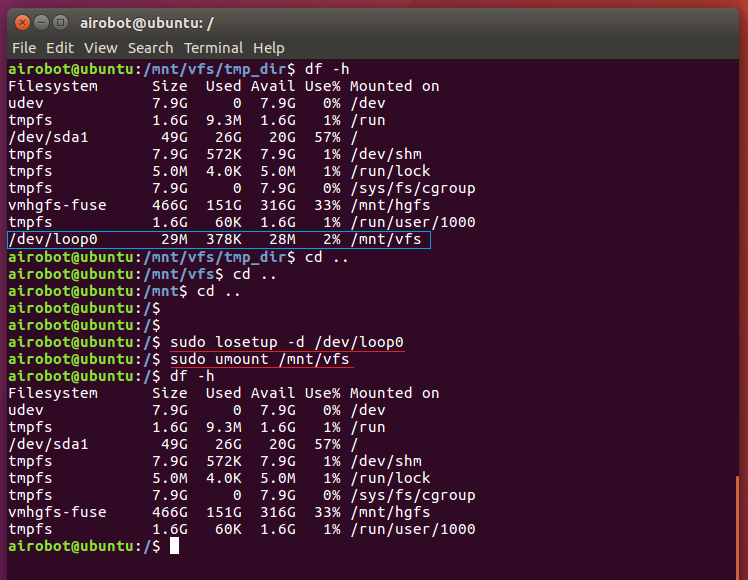
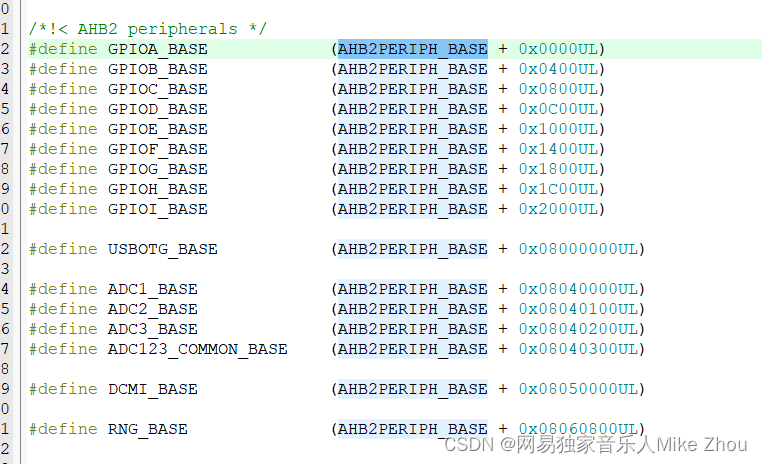
在Linux中创建回环设备(loopback device)的方法
你有没有想过在Linux的文件管理系统中再创建一个文件系统,就像在Windows中创建一个新的磁盘分区那样(但其实并不必非得直接那么做)。这时你就需要用到回环设备(loop device)。 在Linux中,回环设备允许用户以一个普通磁盘文件虚拟一个块设备。设想一个磁盘设备,对它的所有读写操作都将被重定向到读写一个名为 virtualfs 的普通文件而非操作实际磁盘或分区的轨道和扇区。
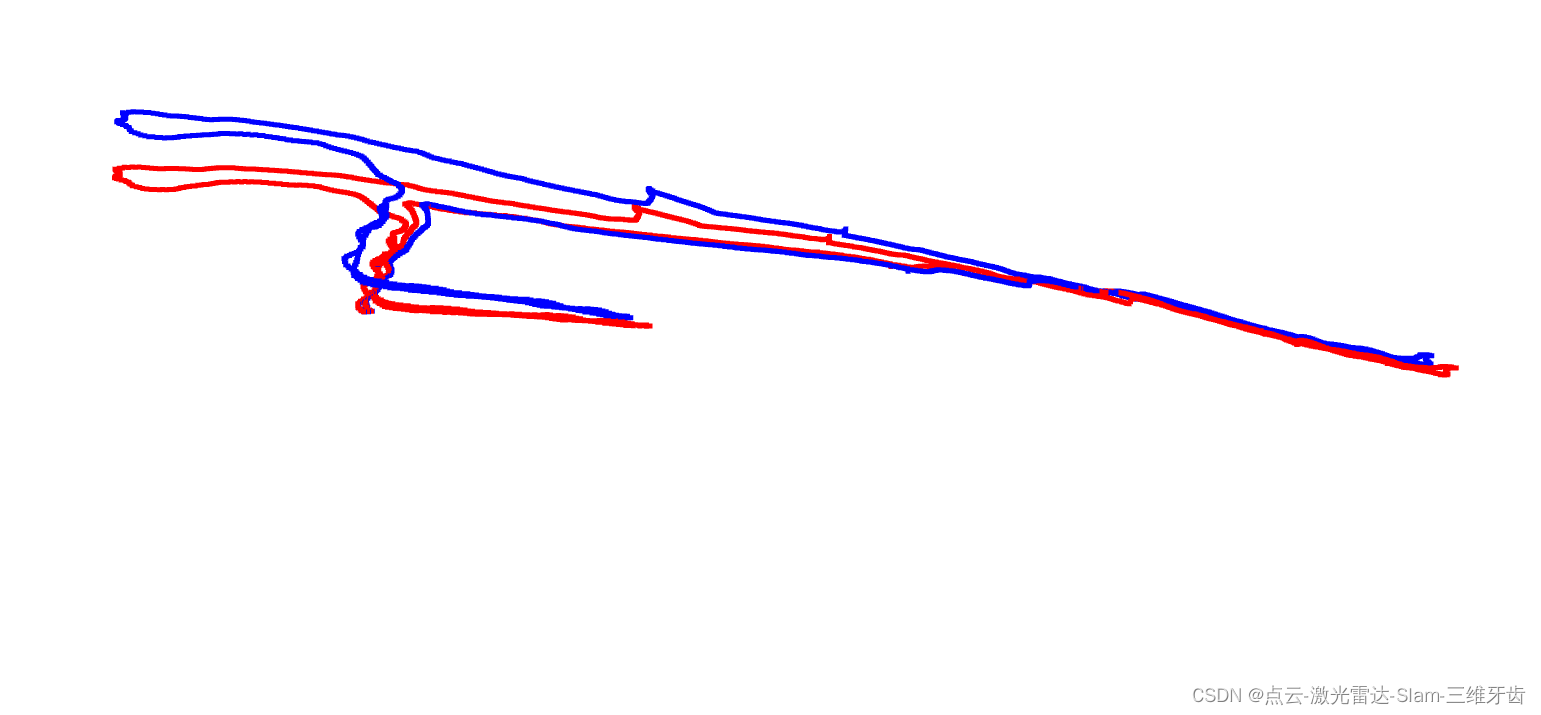
在window系统用 python 做slam回环检测和图优化位姿(附代码思路)
因为 fast lio 没有回环模块,现有的添加回环的一些 github 项目工程又各自有各自的问题,所以我把它每个节点的点云数据和位姿信息保存了下来,自己做一个单独的回环图优化模块,和 LIO 激光里程计模块完全解耦,并且要足够简单,使用一个python代码程序文件即可实现,同时要在window系统也可以运行,经过一些时间的尝试,最后做好了这个代码工具。 特点: 松耦合,以后可以和任意新

网络地址 0.0.0.0 与回环地址 127.0.0.1 的区别
目录 图解0.0.0.0 与 127.0.0.1的区别 回环地址 0.0.0.0 总结对比 一个博客的运行 1. IP地址: 2. 端口号: 图解0.0.0.0 与 127.0.0.1的区别 回环地址 通常指的是127.0.0.1,而0.0.0.0是一个特殊的地址,用于指代本机的所有IP地址,包括回环地址。 回环地址主要用于网络软件测试,它允许计算机发送消息给自己,以

基于光口的以太网 udp 回环实验
文章目录 前言一、系统框架整体设计二、系统工程及 IP 创建三、UDP回环模块修改说明四、接口讲解五、顶层模块设计六、下载验证 前言 本章实验我们通过网络调试助手发送数据给 FPGA,FPGA通过光口接收数据并将数据使用 UDP 协议发送给电脑。 提示:任何文章不要过度深思!万事万物都经不起审视,因为世上没有同样的成长环境,也没有同样的认知水平,更「没有适用于所有人的解
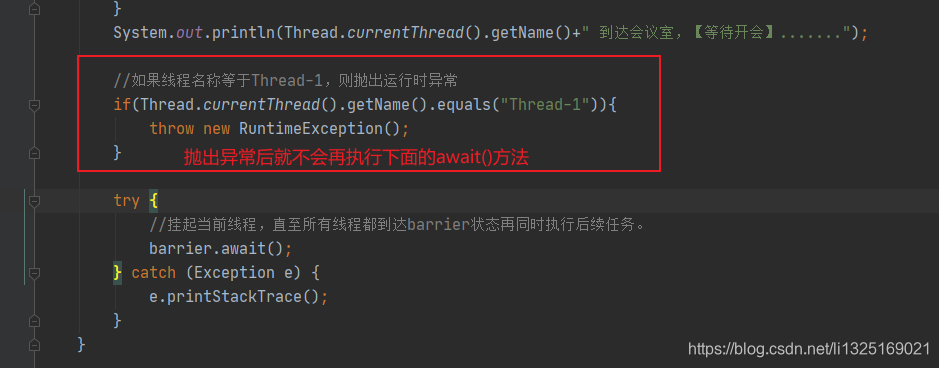
Java并发多线程编程——并发工具类CyclicBarrier(回环栅栏)
目录 一、CyclicBarrier的理解二、CyclicBarrier类中常用的方法三、CyclicBarrier类的使用示例一四、CyclicBarrier类的使用示例二 一、CyclicBarrier的理解 CyclicBarrier属于java.util.concurrent包下;CyclicBarrier字面意思回环栅栏,通过它可以实现让一组线程等待至某个状态之后再全

Linux中的网络配置(二) ---地址解析(DNS)、设定解析的优先级、网关(设置双网卡为路由器,单网卡添加网关)、lo回环接口(转载)
一、设定DNS ##地址解析 #系统操作者对字符敏感 #系统网络通信需要通过ip地址这个数字 #当操作者输入网址www.baidu.com,这个网址不是一个可以通信的IP地址 #于是必须要在系统中把www.baidu.com变成百度服务器的IP地址 #这样的过程叫做地址解析 DNS服务器:domain name server == 域名解析服务 ##解析就是把域名变成IP vim /etc/res
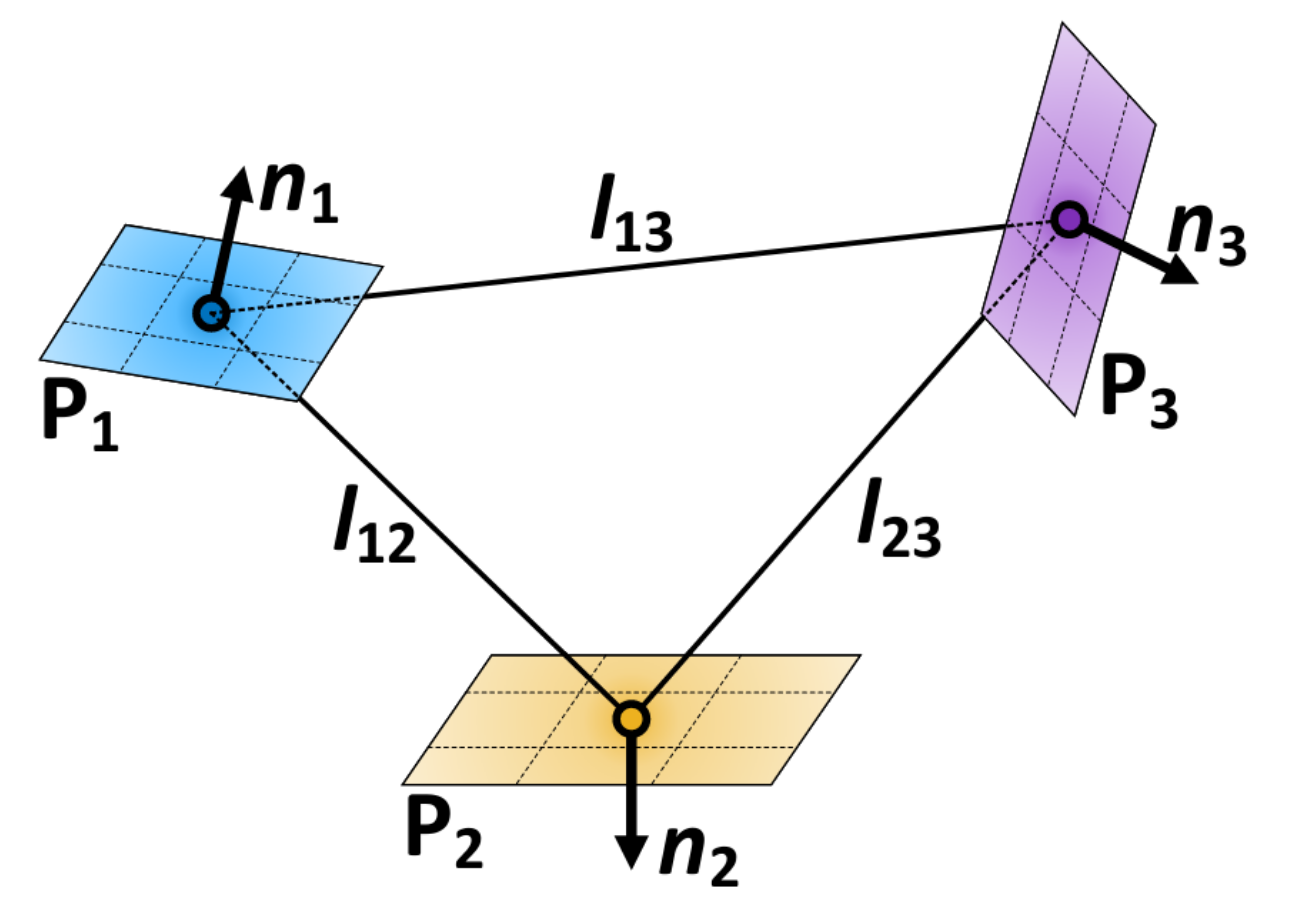
回环检测算法:Stable Trangle Descriptor
回环检测是指检测传感器的两次测量(如图像、激光雷达扫描)是否发生在同一场景,它是对于SLAM问题至关重要。基于激光雷达的回环检测应该满足如下要求: 无论视点如何变化,回环检测方法应该实现旋转和平移不变性;回环检测方法对不同的点云密度和环境应具有鲁棒性,因为激光扫描点云的稀疏性随距离、场景和激光雷达类型而变化;回环检测算法能够更好的提供两帧激光扫描之间的相对位姿,一个好的初始值能让后续的配准算法收

考研系列之回文数、回环变位
说明 本文是相对于比较基础的内容,大于3~5分钟就可以完成,适用于算法与数据结构初学者以及考研er。 正文 在基础的考研复试中,我们经常会遇到一些求回文数的题目,如华科887 2013年上机第一题: 1.输出 100-1000 的所有平方回文数。平分回文数字是满足下列条件的整数:(1)从左读与从右读都是一样的。(2)为某一个数的平方。例:121 是平方回文数。 相对于而言,此种
SLAM学习入门--什么是回环检测
文章目录 SLAM001 什么是回环检测?002 常用的回环检测方法有哪些?003 介绍一下Gauss-Netwon和LM算法004 介绍一下Ceres优化库,比如你使用过里面哪些内容?005 描述(扩展)卡尔曼滤波与粒子滤波,你自己在用卡尔曼滤波时遇到什么问题没有?006 除了视觉传感,还用过其他传感吗?比如GPS,激光雷达007 什么是紧耦合、松耦合?优缺点008 你认为室内SLAM与自

什么是SLAM中的回环检测,如果没有回环检测会怎样
目录 什么是回环检测 如果没有回环检测 SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)是一种使机器人或自动驾驶汽车能够在未知环境中建立地图的同时定位自身位置的技术。回环检测(Loop Closure Detection)是SLAM中的一个关键概念。 什么是回环检测 定义:回环检测是指在SLAM过程中识别机器人返回到之前访问过
CAN静默回环模式测试
本文章主要用于 看自己写的CAN协议代码是否正确 然后因为只有一块板子,不能通信的情况 can.h #ifndef __CAN_H#define __CAN_H#include "head.h"extern FlagStatus can0_receive_flag;extern FlagStatus can0_error_flag;extern can_trasnmit_message_
SLAM | 视觉SLAM中的前端:视觉里程计与回环检测
点击上方“AI算法修炼营”,选择加星标或“置顶” 标题以下,全是干货 什么是SLAM? 同时定位与地图构建 (simultaneous localization and mapping, SLAM)是机器人进入未知环境遇到的第一个问题。它是指机器人搭载特定传感器,在没有环境先验信息的情况下,于运动过程中对周围环境建模并同时估计自身的位姿。如果传感器主要为相机,那么就称为视觉 SLAM(VSLAM
