本文主要是介绍在window系统用 python 做slam回环检测和图优化位姿(附代码思路),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
因为 fast lio 没有回环模块,现有的添加回环的一些 github 项目工程又各自有各自的问题,所以我把它每个节点的点云数据和位姿信息保存了下来,自己做一个单独的回环图优化模块,和 LIO 激光里程计模块完全解耦,并且要足够简单,使用一个python代码程序文件即可实现,同时要在window系统也可以运行,经过一些时间的尝试,最后做好了这个代码工具。
特点:
松耦合,以后可以和任意新发布的里程计结合使用来进行位姿优化
有两种模式,手动设置回环的点或者自动检测回环的模式;
代码简单容易运行
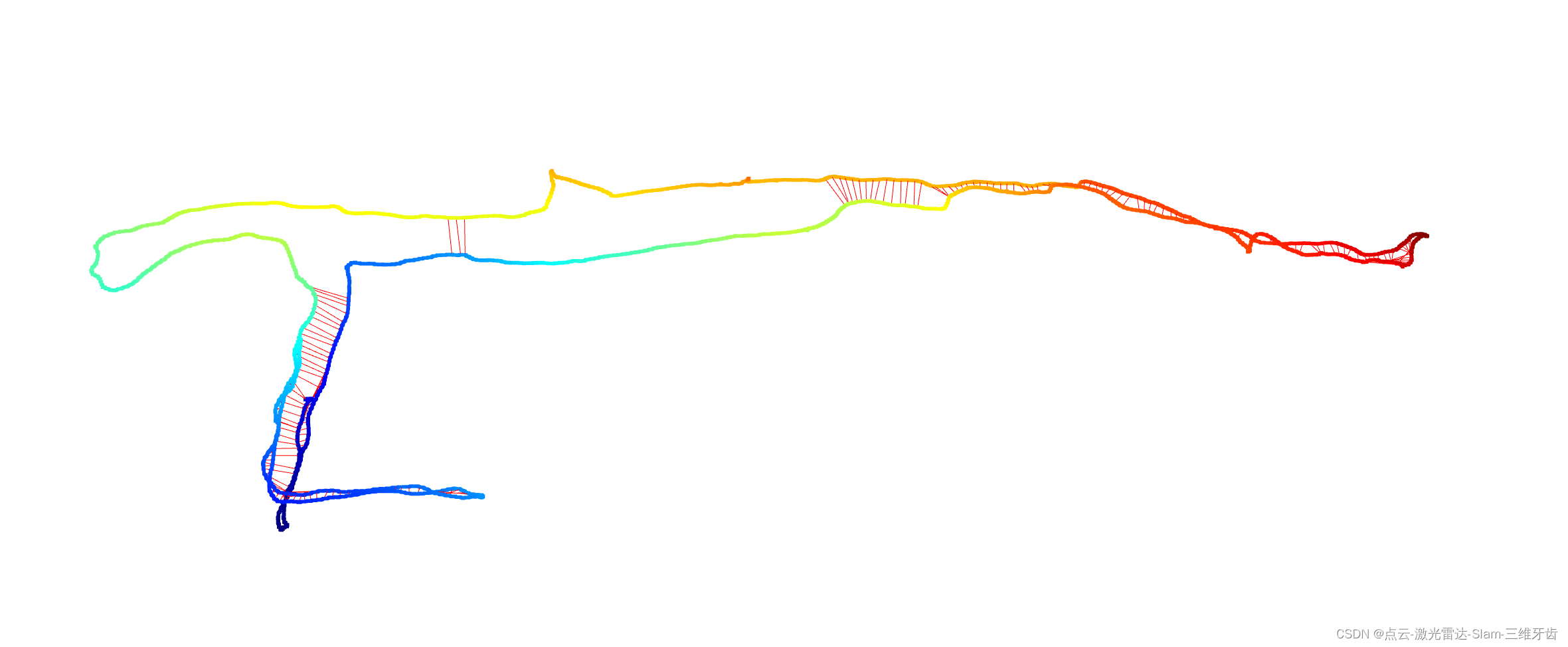
自动检测回环的示意图
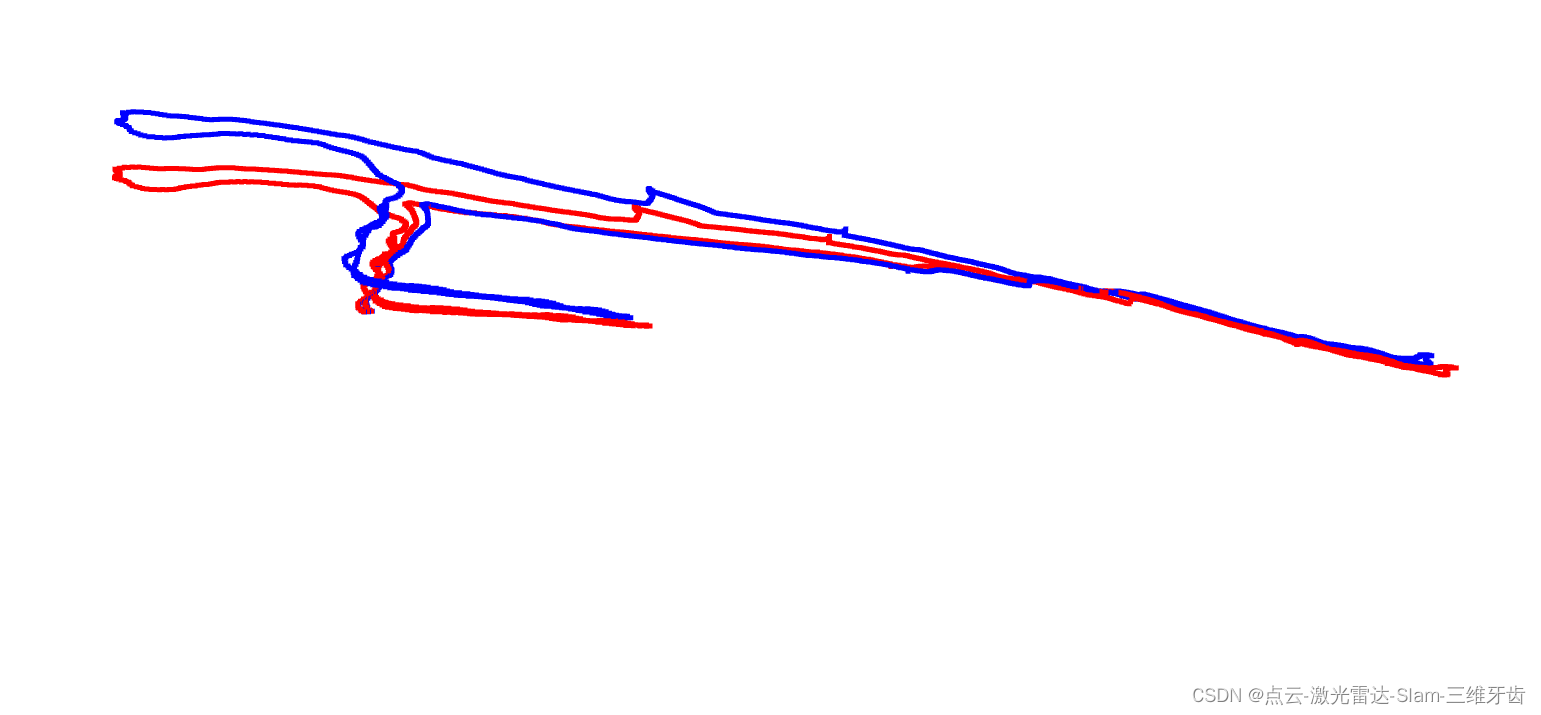
优化高程误差的示意图,红色是优化之后的轨迹,wechat 394467238 有效的去除了高程误差:
使用了open3d 和 numpy 模块;
这篇关于在window系统用 python 做slam回环检测和图优化位姿(附代码思路)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





