本文主要是介绍15 UART回环,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
UART 串口简介
常用的通信方式可分为为串行通信(serial communication)和并行通信(parallel communication)两种。并行通信是多比特数据同时通过并行线进行传送(一般以字或字节为单位并行进行传输),这种传输方式用的线多、成本高、速率高、要考虑时延匹配,不宜进行长距离通信,因此并行通信一般用于板载外设的通信。串行通信是数据在一条线上一比特接一比特地按顺序进行传送,这种传输方式线少、成本低、速率低,事宜用于长距离通信,因此串行通信常用于不同设备之间的通信。
串行通信可分为同步串行通信(synchronized serial communication)和异步串行通信(asynchronous serial communication)。同步串行通信需要通信双方在同一时钟的控制下同步传输数据,如SPI、IIC等,而异步串行通信只需要通信双方约定好通信速率、起始标志、结束标志,然后在各自的时钟的控制下进行数据传输,如UART等。
UART 是一种采用异步串行通信方式的通用异步收发传输器(universal asynchronous receivertransmitter),它在发送数据时将并行数据转换成串行数据来传输,在接收数据时将接收到的串行数据转换成并行数据。UART 通信需要两根信号线来实现,一根用于串口发送,另外一根负责串口接收。

UART传输时序
UART 在发送或接收过程中的一帧数据由 4 部分组成,起始位、数据位、奇偶校验位和停止位
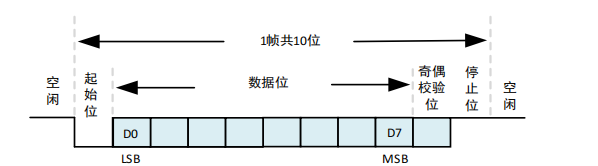
起始位:不传输数据时 UART 数据传输线通常保持高电压电平。若要开始数据传输,发送方会将传输线从高电平拉到低电平并保持 1 个波特率周期。当接收方检测到高电平到低电平的跃迁时,便开始以波特率对应的频率读取数据帧中的位。
数据帧:数据帧包含所传输的实际数据。如果使用奇偶校验位,数据帧长度可以是 5 位到 8 位,如果不使用奇偶校验位,数据帧长度可以是 9 位。在大多数情况下,数据以最低有效位优先方式发送。
奇偶校验:接收方可以通过奇偶校验位来判断数据传输期间是否发生改变(奇校验就是确保数据位和校验位中 1 的个数为奇数,偶校验就是确保数据位和校验位中 1 的个数为偶数)。
停止位:表示数据包结束,发送方将数据传输线从拉到高并保持 1 到 2 位的时间。
在进行UART通信时双方需要约定好数据位数(可选择 5、6、7、8 位)、奇偶校验(可选择奇校验、偶校验、无校验)、停止位(可选择 1 、1.5 、 2 位)、波特率(每秒传输二进制数据的位数)。
UART 硬件
在设置好数据格式及波特率之后,UART 只负责完成数据的串并转换,而信号的传输则由外部驱动电路实现。电信号的传输过程有着不同的电平标准和接口规范,针对异步串行通信的接口标准有TTL、 RS232、RS422、RS485 等,它们定义了接口的电气特性,如 RS-232 是单端输入输出,而 RS-422/485 为差分输入输出等。其中RS232是最常见的标准之一,它一般采用DB9类型的接口,如下图所示



硬件设计
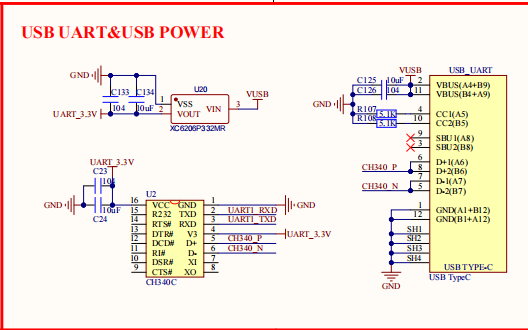
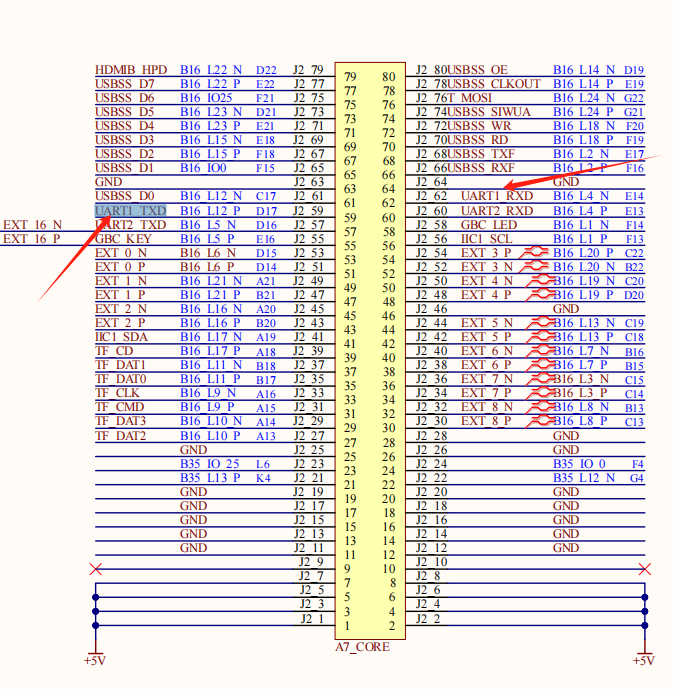
原理图中的 CH340 就是转换芯片(用于将 TTL 标准的 UART 转换为 USB ),其中 UART1_RXD 连接到 FPGA 芯片的的 RX (E14)管脚,UART1_TXD 连接到 FPGA 芯片的 TX(D17) 管脚,CH340_P/N 分别接到开发板的 TYPE - C 插座 D+/-上。
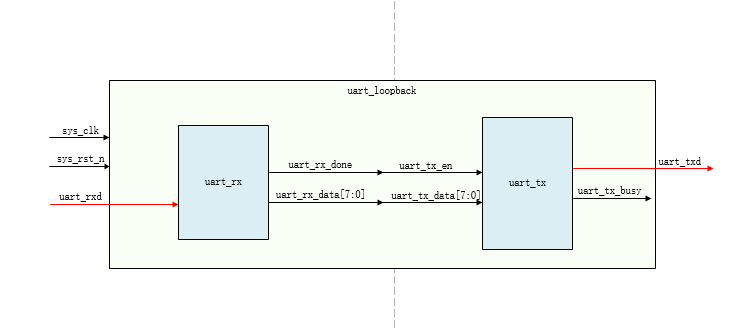
系统框图
本次实验任务是实现串口数据的回环,以此整个设计包括两个子模块,分别用于串口的发送和接收,其系统框图如下:
代码编写
串口接收模块设计
串口接收模块的框图如下:

其时序图如下:

代码如下:
module uart_rx #(parameter CLK_FREQ = 50000000, //系统时钟parameter UART_BPS = 115200 //波特率
)(input sys_clk, //系统时钟input sys_rst_n, //系统复位input uart_rxd, //串口接收线output reg data_flag, //数据有效标志,随数据一起输出,只保持一个时钟周期output reg [7:0] rx_data //串口接收到的数据
);localparam BAUD_CNT_MAX = CLK_FREQ/UART_BPS; //波特率计数器的计数周期//串口输入延迟一拍,用于捕获上升沿
reg uart_rxd_d0;
//启动标志,在空闲状态检测到开始信号拉高
wire start_flag;
//接收忙标志,接收过程中拉高
reg rx_busy;
//波特率计数器
reg [31:0] baud_count;
//接收计数
reg [3:0] rx_count;
//串口接收移位寄存器
reg [7:0] uart_rx_data;//延迟一拍,用于捕获下降沿
always @(posedge sys_clk) beginif(!sys_rst_n)uart_rxd_d0 <= 1'b1;elseuart_rxd_d0 <= uart_rxd;
end//捕获下降沿,在下降沿时刻且接收空闲则拉高start_flag
assign start_flag = ((uart_rxd_d0 & ~uart_rxd & ~rx_busy)) ? 1 : 0;//接收忙标志控制
//检测到start_flag时设置为忙,当接收到8bit数据(不包括启动位)且波特率计数器溢出时设置为空闲
always @(posedge sys_clk) beginif(!sys_rst_n)rx_busy <= 1'b0;else if(start_flag == 1'b1)rx_busy <= 1'b1;else if((rx_count == 4'd8) && (baud_count == (BAUD_CNT_MAX - 1)))rx_busy <= 1'b0;
end//波特率计数器,当接收处于忙状态时进行周期计数
always @(posedge sys_clk) beginif(!sys_rst_n)baud_count <= 0;else if(rx_busy == 1'b1) beginif(baud_count < (BAUD_CNT_MAX - 1))baud_count <= baud_count + 1;elsebaud_count <= 0;endelsebaud_count <= 0;
end//接收计数器,当接收忙且波特率计数器溢出时进行递增计数
always @(posedge sys_clk) beginif(!sys_rst_n)rx_count <= 4'b0;else if(rx_busy == 1'b1) beginif(baud_count == (BAUD_CNT_MAX - 1))rx_count <= rx_count + 4'b1;endelserx_count <= 4'b0;
end//将数据采集到移位寄存器中
always @(posedge sys_clk) beginif(!sys_rst_n)uart_rx_data <= 8'b0;else if(rx_busy == 1'b1) beginif(baud_count == ((BAUD_CNT_MAX - 1) / 2)) begincase(rx_count)4'd1: uart_rx_data[0] <= uart_rxd_d0; //bit04'd2: uart_rx_data[1] <= uart_rxd_d0; //bit14'd3: uart_rx_data[2] <= uart_rxd_d0; //bit24'd4: uart_rx_data[3] <= uart_rxd_d0; //bit34'd5: uart_rx_data[4] <= uart_rxd_d0; //bit44'd6: uart_rx_data[5] <= uart_rxd_d0; //bit54'd7: uart_rx_data[6] <= uart_rxd_d0; //bit64'd8: uart_rx_data[7] <= uart_rxd_d0; //bit7default: ;endcaseendendelseuart_rx_data <= 8'b0;
end//数据有效标志输出
always @(posedge sys_clk) beginif(!sys_rst_n)data_flag <= 1'b0;else if((rx_count == 8) && (baud_count == (BAUD_CNT_MAX - 1)))data_flag <= 1'b1;elsedata_flag <= 1'b0;
end//数据输出
always @(posedge sys_clk) beginif(!sys_rst_n)rx_data <= 1'b0;else if((rx_count == 8) && (baud_count == (BAUD_CNT_MAX - 1)))rx_data <= uart_rx_data;
endendmodule
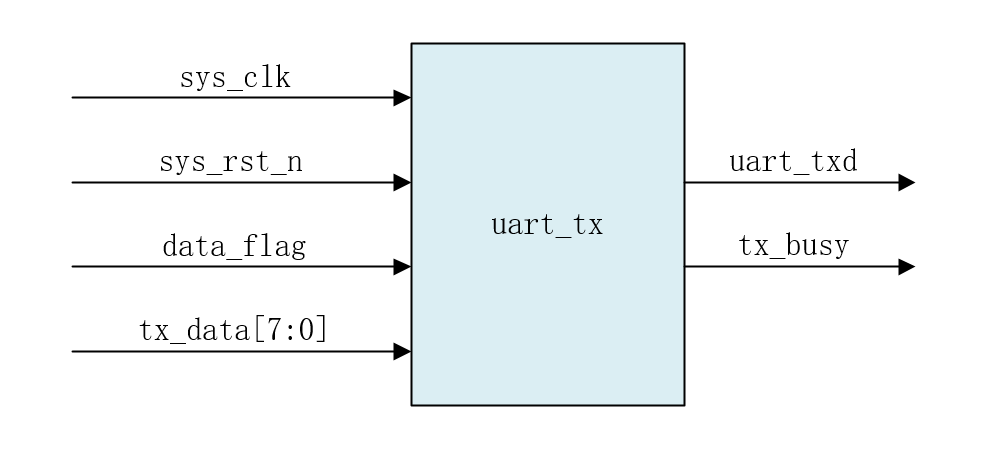
串口发送模块设计
串口发送模块框图如下:
对应的时序图如下:
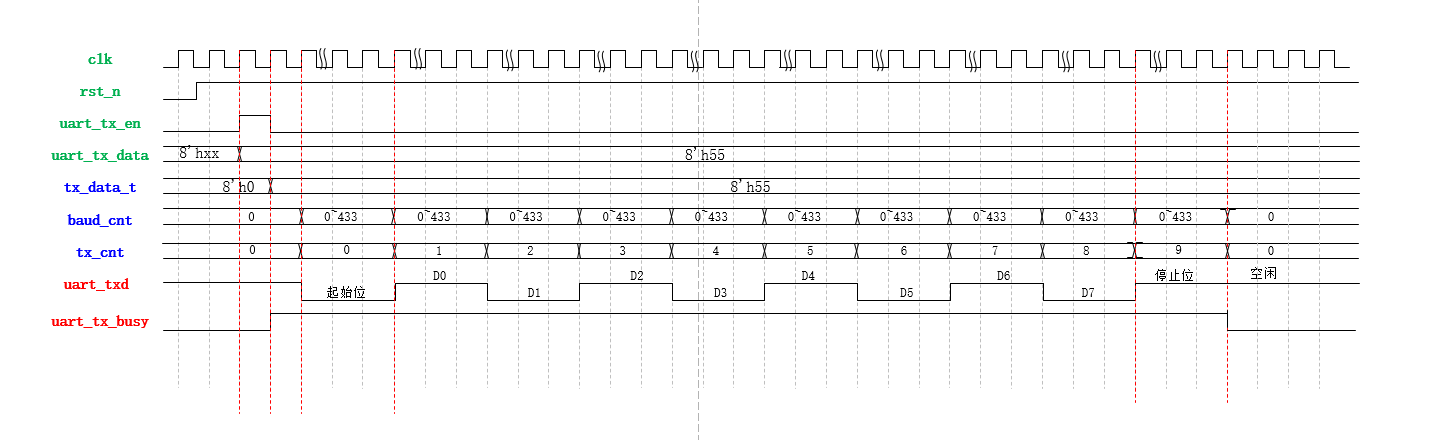
程序代码如下:
module uart_tx #(parameter CLK_FREQ = 50000000, //系统时钟parameter UART_BPS = 115200 //波特率
)(input sys_clk, //系统时钟input sys_rst_n, //系统复位output reg uart_txd, //串口发送线input data_flag, //数据有效标志,随数据一起输入,只保持一个时钟周期input [7:0] tx_data, //串口需要发送的数据output reg tx_busy //串口发送忙标志
);localparam BAUD_CNT_MAX = CLK_FREQ/UART_BPS; //波特率计数器的计数周期//波特率计数器
reg [31:0] baud_count;
//接收计数
reg [3:0] tx_count;
//串口接收移位寄存器
reg [7:0] uart_tx_data;//切换到忙状态控制
//当数据有效且处于空闲状态则转换到忙状态
//当完成发送后又转换到空闲状态,发送空闲周期时提前BAUD_CNT_MAX/32周期结束,确保回环测试时发送速度大于接收速度
always @(posedge sys_clk) beginif(!sys_rst_n)tx_busy <= 1'b0;else if((data_flag == 1'b1) && (tx_busy == 1'b0))tx_busy <= 1'b1;else if((tx_count == 10'd9) && (baud_count == (BAUD_CNT_MAX - BAUD_CNT_MAX / 32 - 1)))tx_busy <= 1'b0;
end//锁定需要发送的数据到移位寄存器
always @(posedge sys_clk) beginif(!sys_rst_n)uart_tx_data <= 8'b0;else if((data_flag == 1'b1) && (tx_busy == 1'b0))uart_tx_data <= tx_data;else if((tx_count == 4'd9) && (baud_count == (BAUD_CNT_MAX - BAUD_CNT_MAX / 32 - 1)))uart_tx_data <= 8'b0;
end//波特率计数器,当发送处于忙状态时进行周期计数
always @(posedge sys_clk) beginif(!sys_rst_n)baud_count <= 0;else if(tx_busy == 1'b1) beginif(baud_count < (BAUD_CNT_MAX - 1))baud_count <= baud_count + 1;elsebaud_count <= 0;endelsebaud_count <= 0;
end//发送计数器,当发送忙且波特率计数器溢出时进行递增计数
always @(posedge sys_clk) beginif(!sys_rst_n)tx_count <= 4'b0;else if(tx_busy == 1'b1) beginif(baud_count == (BAUD_CNT_MAX - 1))tx_count <= tx_count + 4'b1;endelsetx_count <= 4'b0;
end//将移位寄存器中的数据通过txd发送出去
always @(posedge sys_clk) beginif(!sys_rst_n)uart_txd <= 8'b1;else if(tx_busy == 1'b1) begincase(tx_count)4'd0: uart_txd <= 1'b0; //起始位4'd1: uart_txd <= uart_tx_data[0]; //bit04'd2: uart_txd <= uart_tx_data[1]; //bit14'd3: uart_txd <= uart_tx_data[2]; //bit24'd4: uart_txd <= uart_tx_data[3]; //bit34'd5: uart_txd <= uart_tx_data[4]; //bit44'd6: uart_txd <= uart_tx_data[5]; //bit54'd7: uart_txd <= uart_tx_data[6]; //bit64'd8: uart_txd <= uart_tx_data[7]; //bit74'd9: uart_txd <= 1'b1; //停止位default: uart_txd <= 1'b1;endcaseendelseuart_txd <= 8'b1;
endendmodule
顶层模块设计
顶层模块主要负责例化串口接收和发送模块,并将接收到的数据给发送模块进行发送,相应的代码如下:
module uart_loopback #(parameter CLK_FREQ = 50000000, //系统时钟parameter UART_BPS = 115200 //波特率
)(input sys_clk, //系统时钟input sys_rst_n, //系统复位input uart_rxd, //串口接收线output uart_txd //串口发送线
);//串口输入延迟一拍
reg uart_rxd_d0;
//串口输入延迟二拍
reg uart_rxd_d1;//数据有效标志
wire data_flag;
//串口收到的数据
wire [7:0] rx_data;
//串口发送忙标志
wire tx_busy;//延迟两拍,用于消除亚稳态
always @(posedge sys_clk) beginif(!sys_rst_n) beginuart_rxd_d0 <= 1'b1;uart_rxd_d1 <= 1'b1;endelse beginuart_rxd_d0 <= uart_rxd;uart_rxd_d1 <= uart_rxd_d0;end
end//例化串口接收模块
uart_rx #(.CLK_FREQ(CLK_FREQ), //系统时钟.UART_BPS(UART_BPS) //波特率
)u_uart_rx_inst0(.sys_clk(sys_clk), //系统时钟.sys_rst_n(sys_rst_n), //系统复位.uart_rxd(uart_rxd_d1), //串口接收线.data_flag(data_flag), //数据有效标志,随数据一起输出,只保持一个时钟周期.rx_data(rx_data) //串口接收到的数据
);//例化串口发送模块
uart_tx #(.CLK_FREQ(CLK_FREQ), //系统时钟.UART_BPS(UART_BPS) //波特率
)u_uart_tx_inst0(.sys_clk(sys_clk), //系统时钟.sys_rst_n(sys_rst_n), //系统复位.uart_txd(uart_txd), //串口发送线.data_flag(data_flag), //数据有效标志,随数据一起输入,只保持一个时钟周期.tx_data(rx_data), //串口需要发送的数据.tx_busy(tx_busy) //串口发送忙标志
);endmodule
仿真激励代码设计
仿真激励代码先对顶层模块进行复位,然后通过uart_rxd向顶层模块注入数据,同时还要产生50M的时钟,其代码如下:
`timescale 1ns / 1psmodule tb_uart_loopback();//parameter define
parameter CLK_PERIOD = 20; //时钟周期为20ns//reg define
reg sys_clk; //时钟信号
reg sys_rst_n; //复位信号
reg uart_rxd; //UART接收端口
wire uart_txd; //UART发送端口//发送8'h55(8'b0101_0101)
initial beginsys_clk <= 1'b0;sys_rst_n <= 1'b0;uart_rxd <= 1'b1;#200sys_rst_n <= 1'b1;#1000uart_rxd <= 1'b0; //起始位#8680 //延时433个时钟周期uart_rxd <= 1'b1; //D0#8680uart_rxd <= 1'b0; //D1#8680uart_rxd <= 1'b1; //D2#8680uart_rxd <= 1'b0; //D3#8680uart_rxd <= 1'b1; //D4#8680uart_rxd <= 1'b0; //D5#8680uart_rxd <= 1'b1; //D6#8680uart_rxd <= 1'b0; //D7 #8680uart_rxd <= 1'b1; //停止位#8680uart_rxd <= 1'b1; //空闲状态
end//50Mhz的时钟,周期则为1/50Mhz=20ns,所以每10ns,电平取反一次
always #(CLK_PERIOD/2) sys_clk = ~sys_clk;//例化顶层模块
uart_loopback u_tb_uart_loopback_inst0(.sys_clk(sys_clk),.sys_rst_n(sys_rst_n),.uart_rxd(uart_rxd),.uart_txd(uart_txd)
);endmodule
这篇关于15 UART回环的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!