变换器专题

PlanT:通过对象级表示的可解释规划变换器
PlanT: Explainable Planning Transformers via Object-Level Representations PlanT:通过对象级表示的可解释规划变换器 paper code Abstract Planning an optimal route in a complex environment requires efficient reasoni

HTN7862 4V~65V输入,2.8A异步降压变换器
1、特点 2.8A降压,内置260mΩ功率管 输入电压范围:4V~65V 脉冲跳跃模式使得轻载下高效率 ·110uA静态电流 最高2MHZ可编程开关频率 峰值电流控制架构 欠压保护、过流保护和过热关断保护 无铅封装,ESOP8 2、应用 ·12V,24V,48V工业和电信电源轨系统 ·汽车系统 分布式电源系统 高压电源转换 3、概述 HTN7862是2.8A降压转换器,具有从4

Latte:新型【开源】的视频扩散变换器
在人工智能的浪潮中,视频生成技术正逐渐从梦想走向现实。Latte,一种新型的视频扩散变换器(Video Diffusion Transformer),以其独特的技术架构和卓越的性能,正在引领这一领域的新潮流。视频生成技术的核心挑战在于如何从零开始,生成既连贯又逼真的视频内容。随着深度学习技术的不断进步,一种新型的视频生成模型——Latte,以其基于扩散机制的变换器架构,为这一挑战提供了全新的解决方
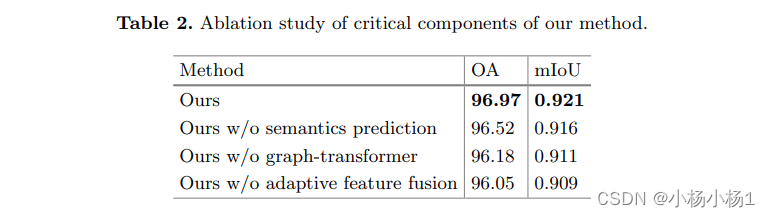
3D牙科网格分割使用基于语义的特征学习与图变换器
文章目录 3D Dental Mesh Segmentation Using Semantics-Based Feature Learning with Graph-Transformer摘要方法实验结果 3D Dental Mesh Segmentation Using Semantics-Based Feature Learning with Graph-Transforme
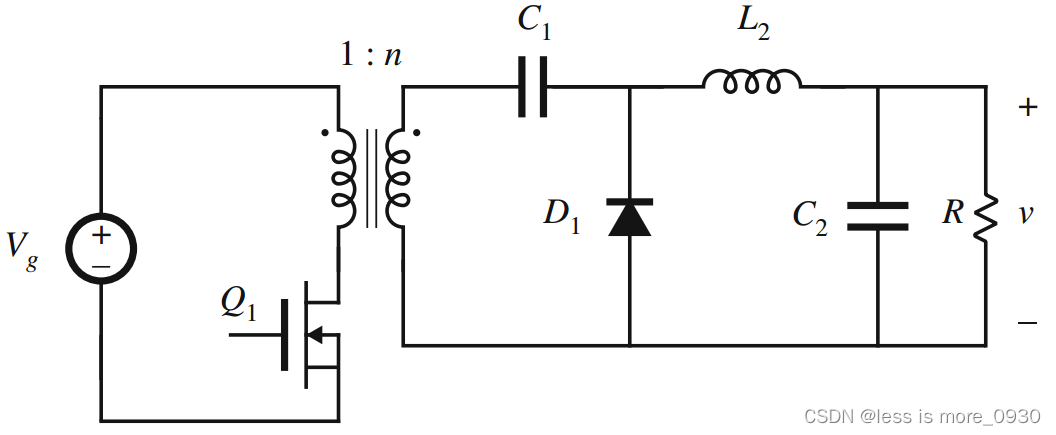
《Fundamentals of Power Electronics》——升压隔离型变换器、SEPIC隔离型变换器
以下是升压型隔离变换器的相关知识点: 升压型隔离变换器可以通过互换降压型隔离变换器的电源与负载的位置得到。升压型隔离变换器有许多种结构,此处简短的讨论两种情况。这些转换器主要使用在高压电源和低谐波整流器中。 图6.36所示是一种全桥型电路结构。 其工作在连续导通模式下的波形如下图所示。 以下是隔离型SEPIC转换器的相关知识点: 用于在反激变换器中获得隔离型版

政安晨:【Keras机器学习示例演绎】(三十)—— 使用变换器进行视频分类
目录 数据收集 设置 定义超参数 数据准备 构建基于变换器的模型 培训的效用函数 模型训练和推理 政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras机器学习实战 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 本文目标:用混合变压器训练视频分类器。 本示例是使用 CNN-RNN 架构(卷积神经
空间变换器网络的简介+实现
空间变换器网络 是对任何空间变换的差异化关注的概括。空间变换器网络(简称STN)允许神经网 络学习如何在输入图像上执行空间变换, 以增强模型的几何不变性。 例如,它可以裁剪感兴趣的区域,缩放并校正图像的方向。而这可能是一种有用的机制,因为CNN对于旋转和 缩放以及更一 般的仿射变换并不是不变的。 空间变换器网络归结为三个主要组成部分: 本地网络(Localisation Network
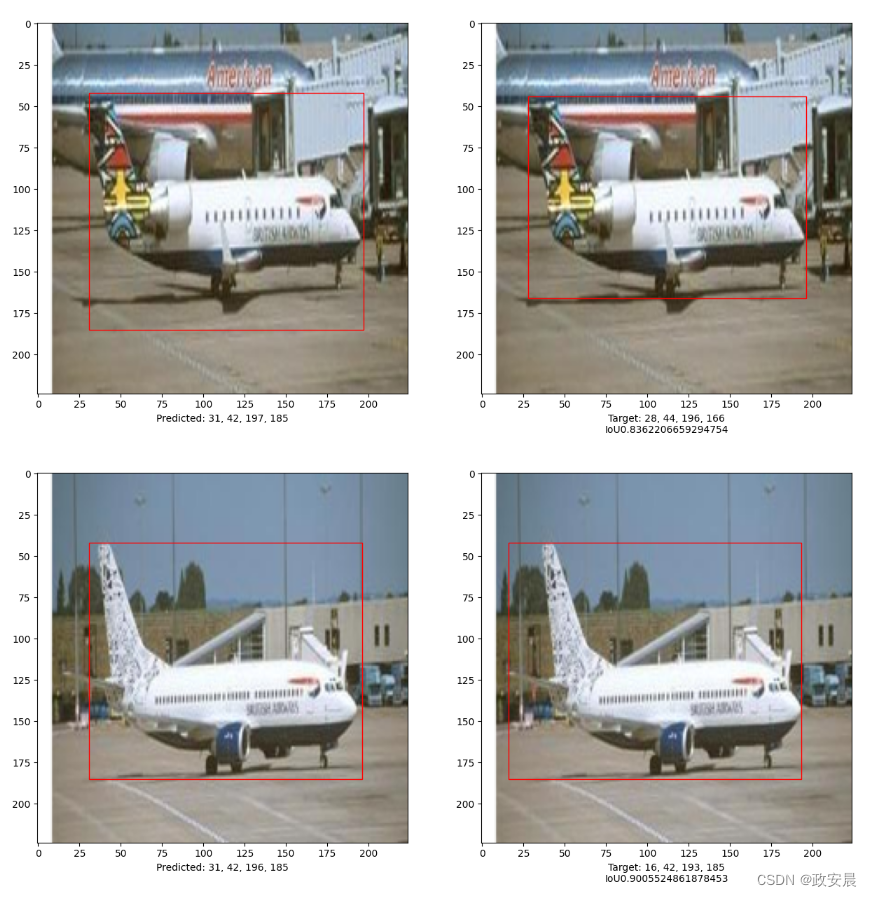
政安晨:【Keras机器学习示例演绎】(五)—— 利用视觉变换器进行物体检测
目录 导言 导入和设置 准备数据集 实施多层感知器(MLP) 实施补丁创建层 显示输入图像的补丁 实施补丁编码层 构建 ViT 模型 运行实验 评估模型 政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras机器学习实战 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 本文目标:使用视觉变换器
DC/DC电源模块直流升压变换器电压控制输出5V12V24V转0-50V80V110V150V180V200V250V300V500V800V1000V
特点 效率高达 75%以上1*2英寸标准封装单电压输出可直接焊在PCB 上工作温度: -40℃~+75℃阻燃封装,满足UL94-V0 要求温度特性好电压控制输出,输出电压随控制电压线性变化 应用 GRB 系列模块电源是一种DC-DC升压变换器。该模块电源的输入电压分为:4.5~9V、9~18V、18~36V及36~72VDC标准(2:1)宽输入电压范围(宽电压输入模块电源
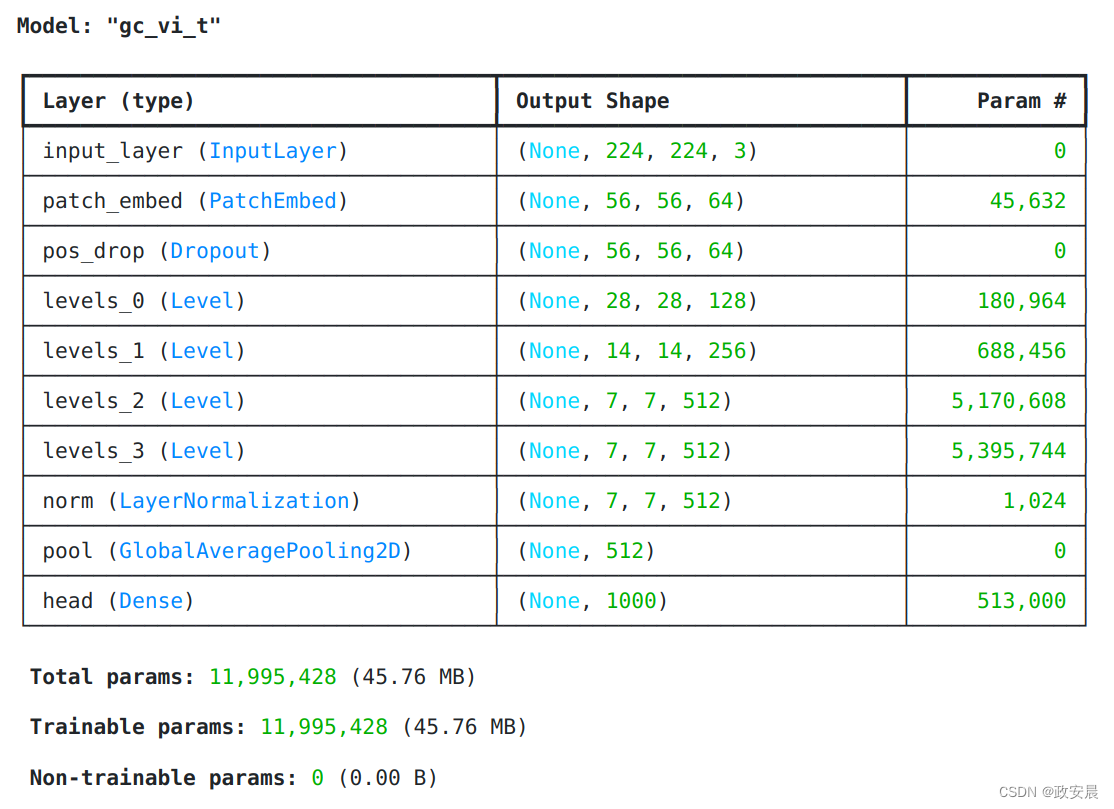
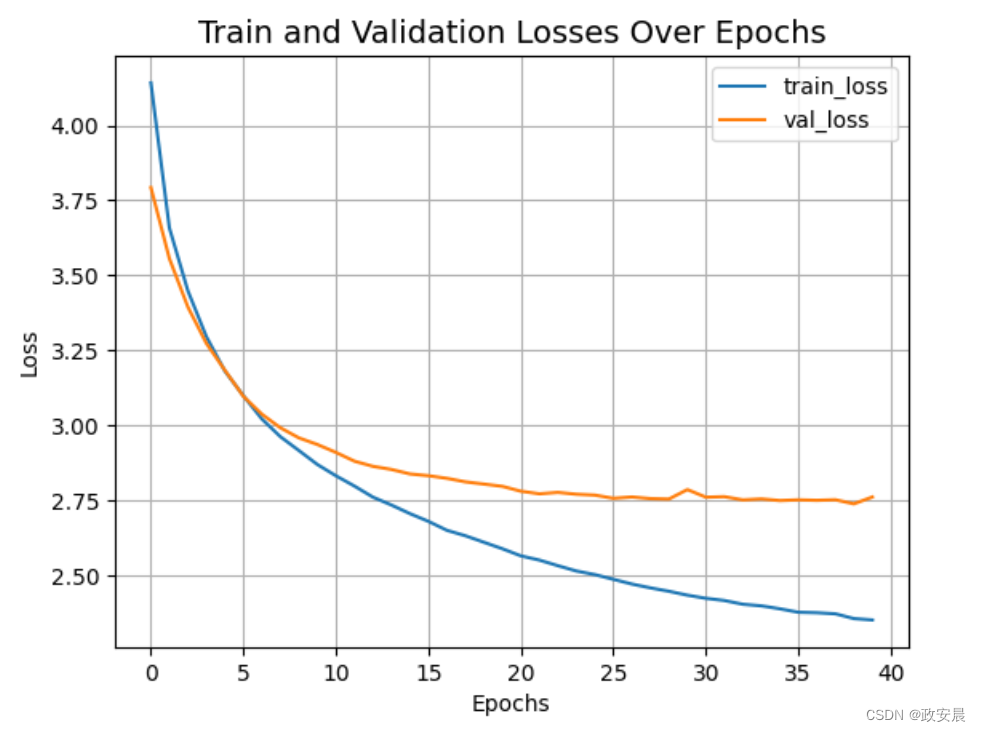
政安晨:【Keras机器学习实践要点】(三十一)—— 使用全局上下文视觉变换器进行图像分类
目录 设置 简介 动机 结构 全局Token创建 模块 窗口 级别 模型 建立模型 预训练权重的理智检查 微调 GCViT 模型 配置 数据加载器 花卉数据集 为花卉数据集重建模型 训练 政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras机器学习实战 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在
政安晨:【Keras机器学习实践要点】(三十)—— 使用斯温变换器进行图像分类
目录 设置 配置超参数 准备数据 辅助函数 基于窗口的多头自注意力计算 模型训练与评估 准备 tf.data.Dataset 建立模型 在 CIFAR-100 上训练 政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: TensorFlow与Keras机器学习实战 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 本文目标:使

习题 8-3 比特变换器(Bits Equalizer, SWERC 2012, UVa12545)
原题链接:https://vjudge.net/problem/UVA-12545 分类:贪心法 备注:简单思维题 先看还少多少个’1’,如果s的’1’多余t的‘1’肯定无解。 然后把少掉的这些’1’,全部用’?‘去变成’1’,如果’?‘有剩余则变“0‘。 如果’?‘不够,则要把遍历一遍,当’1’的数量处于不足状态时,把没匹配的’0’变’1’。 最后会剩下2*k个位置不匹配的字符,两两交换,贡献
使用立体视觉作为 3D LiDAR 的替代方案,在 KITTI ADAS 立体视觉数据集上微调立体变换器 (STTR) 模型-含数据集+源码资料下载
为什么是立体视觉? ADAS 立体视觉是指使用两个摄像头(类似于人眼)从略有不同的角度捕获图像的技术。该设置模仿人类双眼视觉,使系统能够感知环境的深度和 3D 结构。 立体视觉的关键技术方面 ADAS 立体视觉具有多种优势和高度复杂的功能。让我们探索它们以更好地理解: 对极几何和深度估计:立体视觉依赖于对极几何,这是计算机视觉中的一个基本概念,描述了立体设置的两个视图之间的几何关系。通过
移相全桥DC-DC变换器
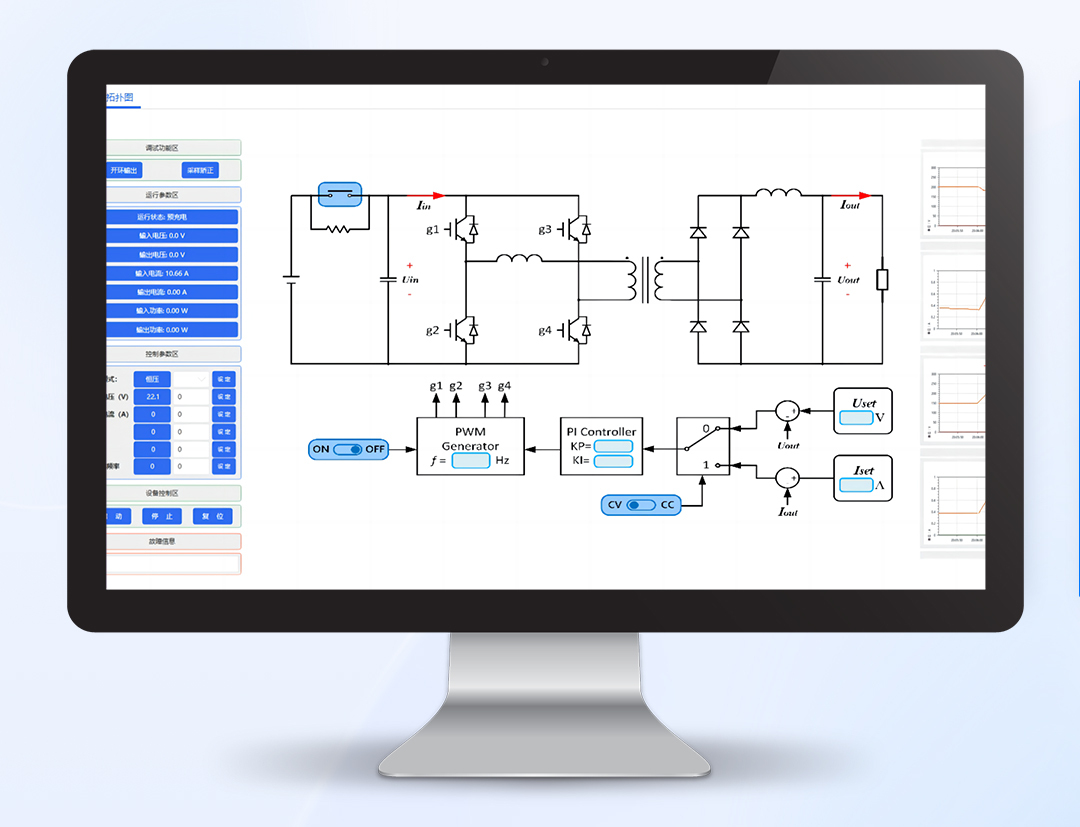
本篇将基于PPEC-86CA3A移相全桥数字电源控制芯片以及PPEC Workbench开发软件带领大家进行实际移相全桥DC-DC变换器的设计与开发 。 一、移相全桥变换器设计与开发 1、外围电路设计与硬件平台搭建 1)外围电路设计 这里给出了PPEC-86CA3A移相全桥数字电源控制芯片的采样、PWM驱动以及硬件保护等外围电路设计图,大家可参考下图进行外围电路搭建与连接。
电路方案分析(十八)四开关buck-boost双向同步DC/DC变换器方案
tip是:资料来自网络,仅供学习交流使用! 1.概述 4开关降压升压双向DC-DC电源转换器在很多应用中都有使用。作为一个同步降压或同步升压转换器,其中只有两个开关切换,开关损耗减少到一半。只有当直流母线和电池电压彼此接近,然后转换器作为一个同步降压-升压转换器,其中所有四个开关切换。 典型应用: 1.本地储能系统; 2.备用电池单元(BBU); 3.DC-DC非隔离应用。 2.系统
基于单片机的Buck型变换器控制
摘要:对于电子产品而言,必不可少的供电电源,随着人们对电子产品的安全性能要求越来越高,变相的对供电电源提出了新的机遇和挑战。Buck型变换器控制的研究一直是该领域重要的一方面,对于直流斩波电路而言,研究最多是压斩波电路。本文研究了一种基于单片机STM32F10ZET6的Buck型变换器控制,由主回路、控制回路以及超前滞后校正器三方面组成,控制回路用于输出指定的频率和占空比的数字PWM脉冲波;主回路

【开关电源】开关变换器动态模型线性化前提
开关变换器在静态工作点运行时,假设在稳定占空比附近有一个小的扰动,该扰动会引起输出电压的变化,这种是非线性的变化。线性化过程就是在静态工作点附近近似的用切线代替曲线。 小信号扰动是开关变换器动态模型线性化的前提条件之一。也就是变换器电路中各变量的交流扰动分量远远小于其稳态直流分量。小信号的扰动量频率应该远远低于变换器开关频率。因此,开关变换器的输出电压也被低频调制,在相应直流稳态输出电压基础上,
【开关电源】降压变换器(BUCK)的断续模式建模
1.前言 在DCDC变换器中BUCK变换器是最基础的一类降压型变换器,它可以将输入电压降低后输出。在连续模式CCM下,输出和输入之间的比值是D(D为占空比)。这种开关变换器是一种通过电子开关周期分合的调节方式控制电能流动的功率变换电路。 2.BUCK模式判断原理 如上图,BUCK变换器是一种降压型变换器,输出电压V比输入电压Vg低。根据输出电感L中的电流是否是连续,BUCK

音频分类革命:如何用Hugging Face实现前沿的音频频谱图变换器
目录 引言 ASTConfig 参数解释 示例代码及注释 ASTFeatureExtractor 参数解释 call 方法参数 ASTModel 参数 forward 方法参数 返回值 返回的主要元素 示例代码及说明 ASTForAudioClassification 参数 forward 方法参数 返回值 主要返回元素
基于pytorch的视觉变换器-Vision Transformer(ViT)的介绍与应用
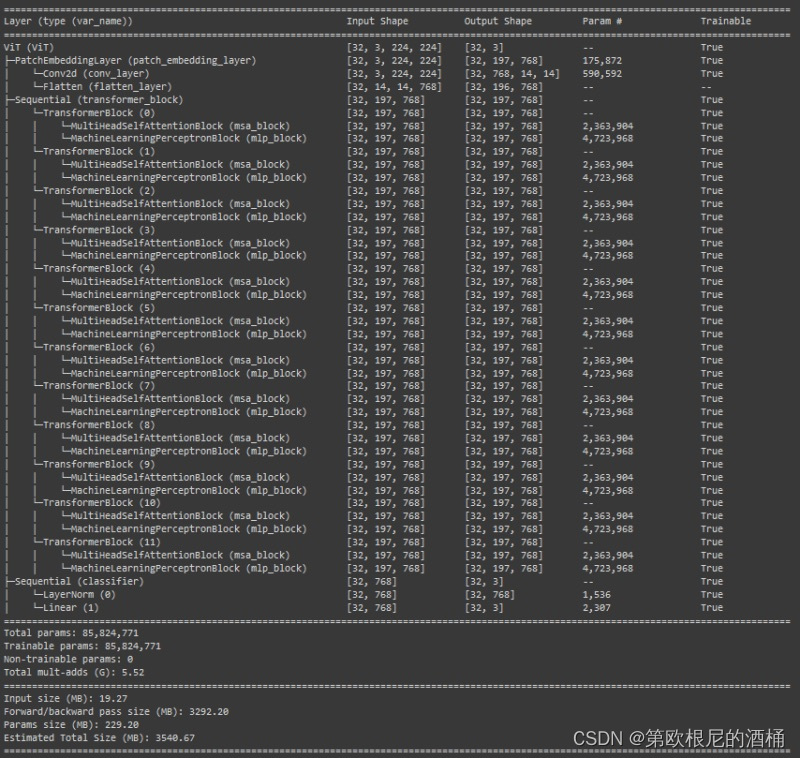
近年来,计算机视觉领域因变换器模型的出现而发生了革命性变化。最初为自然语言处理任务设计的变换器,在捕捉视觉数据的空间依赖性方面也显示出了惊人的能力。视觉变换器(Vision Transformer,简称ViT)就是这种变革的一个典型例子,它提出了一种新颖的架构,在各种图像分类任务上实现了最先进的性能。 在这篇文章中,我们将一起构建我们自己的视觉变换器模型,使用PyTorch进行实现。通过逐步分解
LLC谐振变换器变频移相混合控制MATLAB仿真
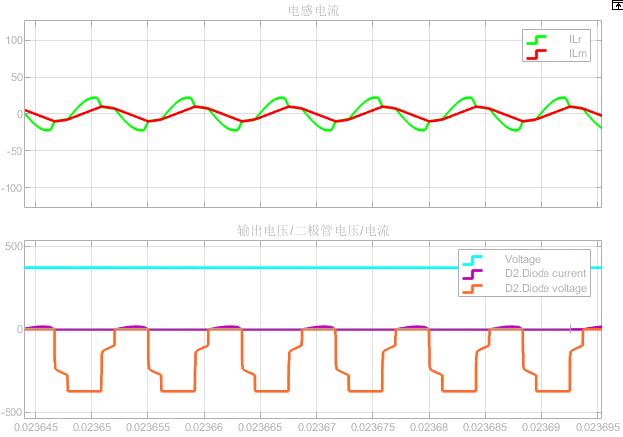
微❤关注“电气仔推送”获得资料(专享优惠) 基本控制原理 为了实现变换器较小的电压增益,同时又有较 高的效率,文中在变频控制的基础上加入移相控制, 在这种控制策略下,变换器通过调节一次侧开关管 的开关频率和移相角来调节输出电压,二次侧开关 管的体二极管作为整流网络,此时变换器工作于“fs > fr”的情况。 fs > fr 时的变频 + 移相控制工作波形如图所示,其前半个周期的工作状
DC-DC升压模块变换器微型SIP小体积5v12v15v24v转100V110V150V180V200V250V300V500V800VDC
0.2~2W,微型SIP,单/双输出DC/DC变换器 F特征 效率高达88%1000VDC/3000VDC隔离MTBF>2,000,000小时低成本输入5、12、15和24VDC输出100,110,150,180,200,250,300,500,800 VDC ±50,±55,±75,±90,±100,±125,±150,±250和±400 VDC 温度性能-40℃~+85℃UL 94V-
高效率反激变换器设计技巧-电子研习社
高效率反激变换器设计技巧-电子研习社 今天观看了电子研习社的直播课程-高效率反激变换器设计技巧,主讲人是李义。 什么影响反激的效率:漏感、较大的峰值电流IPK。 控制漏感是重头戏,现在应该以1%漏感为标准,做得好的可以做到0.5%。 峰值电流在最低输入电压的时候更明显,所以可以限制最低输入电压,尽量不做宽压输入电源。 原边电压应力较其它拓扑更大,原因是反射电压、漏感尖峰电压叠加在输入电压
【文献解读】“MOBILEViT:轻量级、通用目的、移动友好的视觉变换器”。
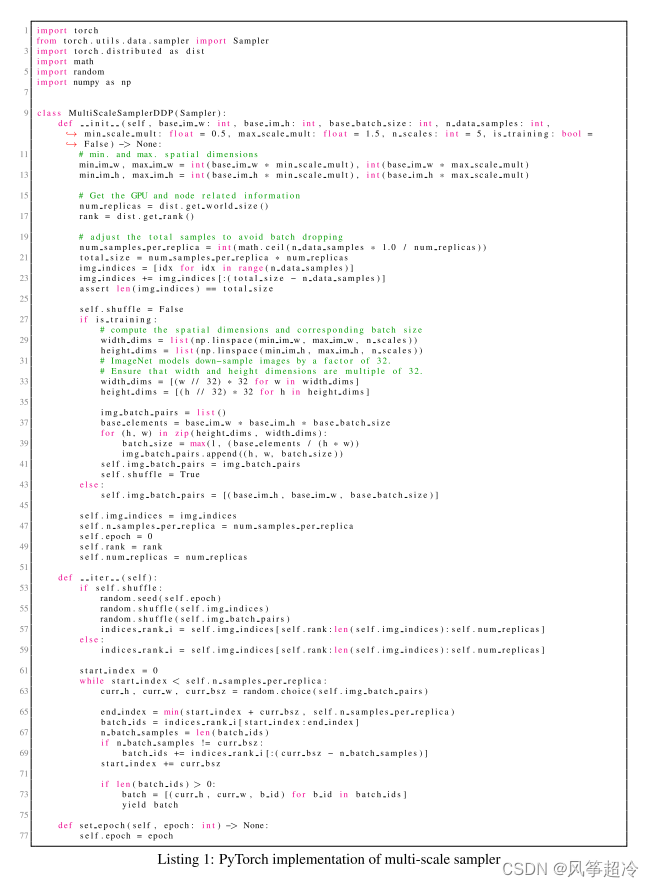
今天阅读这篇2022年ICLR会议上发表的论文,主要是为了学习MobileViT模型,用于YOLO模型主干改造。 一、文献概述 作者:Sachin Mehta 和 Mohammad Rastegari。地点:作者所属机构是 Apple。内容简述: 提出了一种名为MobileViT的视觉变换器,它是为移动设备设计的轻量级、通用目的的卷积神经网络(CNN)。MobileViT旨在结合CNN
绘制电力电子变换器伯德图的三种方法(with MATLAB 工具)
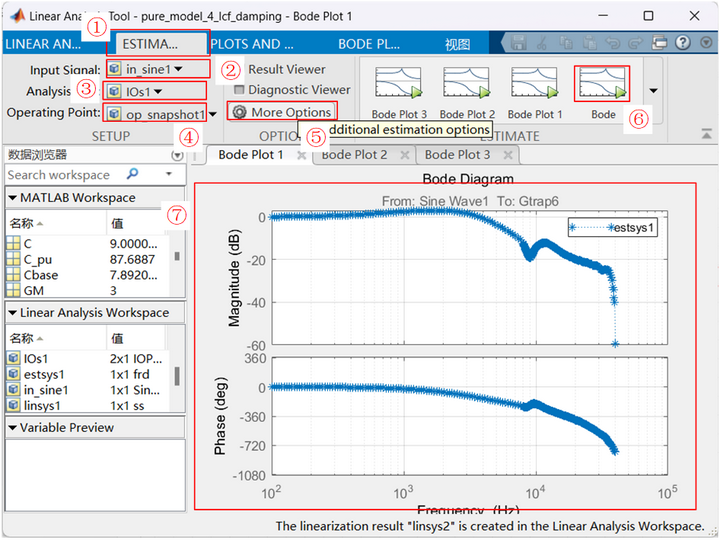
使用bode命令绘制伯德图 首先对电力电子变换器进行建模,求出其控制环路的开环传递函数。然后在命令窗口(或者m文件)中使用tf命令构造传递函数,再使用bode命令绘制传递函数的伯德图即可。比如这里要绘制LCL逆变器电流环的伯德图。首先手动推得LCL逆变器(模块)电流环的开环传递函数为下式。 然后就在MATLAB中用下面的命令构造传递函数并绘制伯德图。 采用本方法绘
内置功率 MOSFET 的高频同步整流降压开关变换器
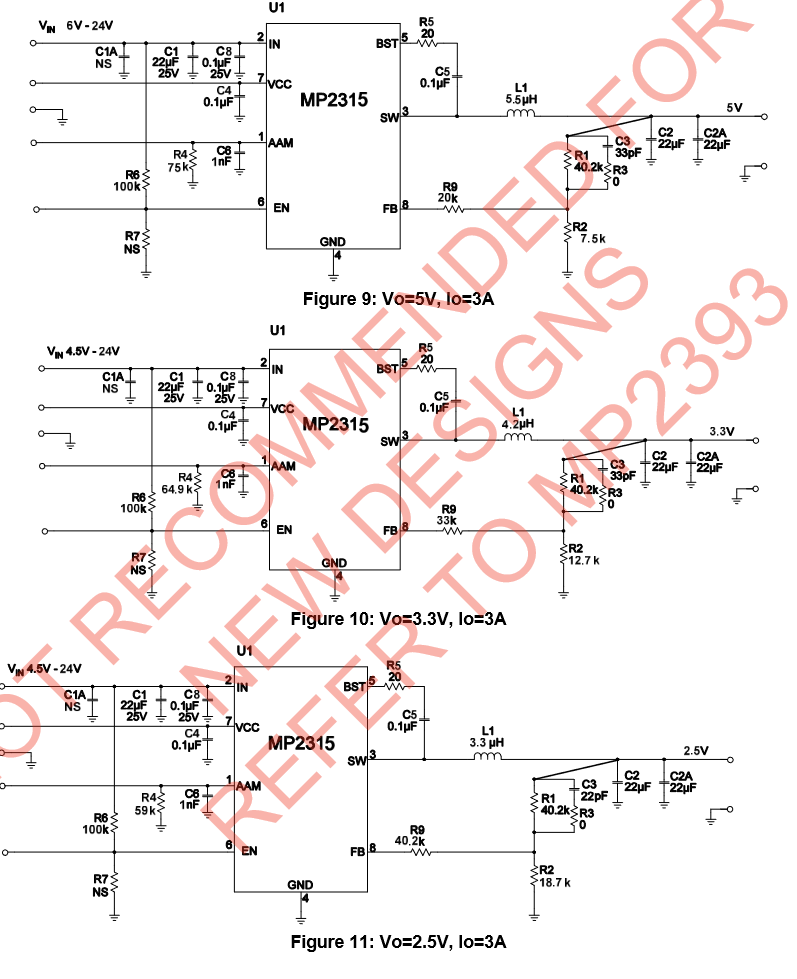
一、基本描述 MP2315 是一款内置功率 MOSFET 的高频同步整流降压开关变换器。它提供了非常紧凑的解决方案,在宽输入范围内可实现 3A 连续输出电流,具有出色的负载和线性调整率。MP2315 在输出电流负载范围内采用同步工作模式以达到高效率。其电流控制模式提供了快速瞬态响应,并使环路更易稳定。全方位保护功能包括过流保护(OCP)和过温关断保护。MP2315 最大限度地减少了现有标准外部元