本文主要是介绍【开关电源】降压变换器(BUCK)的断续模式建模,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.前言
在DCDC变换器中BUCK变换器是最基础的一类降压型变换器,它可以将输入电压降低后输出。在连续模式CCM下,输出和输入之间的比值是D(D为占空比)。这种开关变换器是一种通过电子开关周期分合的调节方式控制电能流动的功率变换电路。
2.BUCK模式判断原理
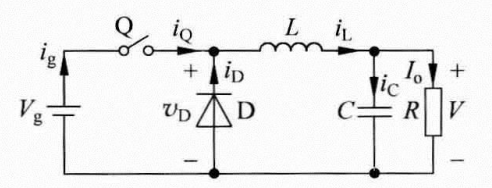
如上图,BUCK变换器是一种降压型变换器,输出电压V比输入电压Vg低。根据输出电感L中的电流是否是连续,BUCK变换器可以工作在连续模式(左)和断续模式(右)。
如何去判断工作在哪个模式呢?
我们可以通过电感峰峰值和电感平均值的大小来判断。
1.如果电感峰峰值的一半大于电感平均值,则处于断续模式
2.如果电感峰峰值的一半小于电感平均值,则处于连续模式
3.如果电感峰峰值的一半等于电感平均值,则处于临界模式
3.BUCK模式判断方法
由于BUCK变换器的输出电流和电感电流相等的。所以
可以推出以下公式,满足便连续,不满足则不连续:
可以化简上面不等式:
其中,是输出电压,
是占空比,
是电感,
是负载,
是周期,
是开关频率。
4. BUCK断续模式建模
当BUCK电路处于断续模式时候,也就是满足 下式:
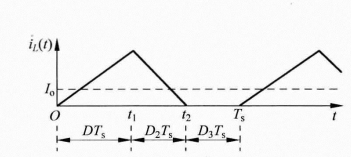
此时,电感电流如下所示:

此时,电感电流一共拥有三个状态:
0-t1:电感充电,mos导通。
t1-t2:电感放电,MOS断开。
t2-ts:电感无电流,MOS断开。
对三个状态建模:(假设所有器件为理想器件。输入稳定,输出稳定)
(0-t1)MOS管导通,电感电流线性增加,电感处于储能状态:
(t1-t2)MOS管截止,电感电流线性减少,电感处于放电状态:
(t2-ts)MOS管截止,电感电压和电感电流均为零:
根据电感的伏秒平衡特性可以得出:
根据电容的安秒平衡:
整理三个阶段的方程、电感方程和电容方程。
可以得到在断续模式下,输出和输入之间的关系:
其中,是输出电压,
是占空比,
是电感,
是负载,
是周期。
这篇关于【开关电源】降压变换器(BUCK)的断续模式建模的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







