北醒专题

Benewake(北醒) TF40雷达在Arduino UNO上的运用
目录 文档说明准备硬件:软件Arduino程序关联库(测试版本) 接线示意图例程:输出结果 链接: https://pan.baidu.com/s/1J42i3Co-ZO5aiLM59T4FXA 提取码: 7ykt 文档说明 本文档基于Arduino UNO硬件开发板测试 本例程适用北醒单点雷达TF40 准备 硬件: 北醒TF40单点测距雷达 Arduino UNO开


北醒荣获“2021中国领先汽车科技企业50强”
8月4日,毕马威中国发布2021年《中国领先汽车科技企业50》榜单。为促进中国汽车科技领域的发展,该榜单至今已连续举办5届,其关注度不断上升。本届榜单主要分为电动化、智能网联、创新服务、出行方式四大类别。 中国汽车科技发展进入到加速阶段,在第四届汽车科技50榜单中,智能网联领域企业仍然占据了最多比例。北醒(北京)光子科技有限公司凭借在激光雷达领域的出色表现和市场上的优异成绩,实力登榜,入驻智能网

北醒携全球首款256线车规量产激光雷达亮相广州国际车展
11月17日,北醒携全球首款256线车规量产激光雷达亮相广州国际车展。在车展期间,北醒还公布了与广州花都区人民政府达成投资合作,获滴滴自动驾驶投资以及与捷普联合打造的全球首条量产256线级别车规激光雷达的生产线即将贯通的等多条利好信息,北醒CEO李远表示,近期北醒还将相继公布更多前装定点的进展。 领先架构,全球首款256线车规矩量产激光雷达闪亮登场 本次广州车展上北醒展出了全球首款256线

Benewake(北醒) 中距 TF02-i 40m工业版本CAN/485介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 产品快速测试说明3.3 通用指令串口助手使用说明 4 基于开源硬件的运用整理4.1 在开源飞控上的运用 5 基于其他的运用整理5.1 在Python上的应用5.2 Modbus设备在Modbus scan上面的使用方法 1 前言 本文包含【Benewake(北醒) 】中距 TF02-i 40m工业版

Benewake(北醒) 短距 TFmini-i 12m工业版本CAN/485介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 产品快速测试说明3.3 通用指令串口助手使用说明 4 基于开源硬件的运用整理4.1 在开源飞控上的运用 5 基于其他的运用整理5.1 在Python上的应用(基于Windows)5.2 在Python上的应用(基于Ubuntu)5.3 Modbus设备在Modbus scan上面的使用方法 1 前言

Benewake(北醒) 长距 TF03 100m/180m介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 通用上位机测试说明3.3 通用指令串口助手使用说明3.4 产品快速测试说明3.5 操作视频 4 基于开源硬件的运用整理4.1 在开源飞控上的运用4.2 在开源Arduino上的运用4.3 在Raspberry(树莓派)上的运用说明4.4 在STM32上的运用4.5 在51系列单片机上的运用 5 其它的运用整理5.

Benewake(北醒) 中距 TF02-Pro-W TTL/485介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 通用上位机测试说明3.3 通用指令串口助手使用说明3.4 产品快速测试说明3.5 快速测试视频 4 基于开源硬件的运用整理4.1 在开源飞控上的运用4.2 在开源Arduino上的运用4.3 在Raspberry(树莓派)上的运用说明4.4 在STM32上的运用4.5 在51系列单片机上的运用4.6 在ESP32

Benewake(北醒) 中距 TF02-Pro 40m介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 通用上位机测试说明3.3 通用指令串口助手使用说明3.4 产品快速测试说明3.5 操作视频 4 基于开源硬件的运用整理4.1 在开源飞控上的运用4.2 在开源Arduino上的运用4.3 在Raspberry(树莓派)上的运用说明4.4 在STM32上的运用4.5 在51系列单片机上的运用4.6 在ESP32上的
Benewake(北醒) 单点TF系列雷达在 ESP32 DEVKIT_V1 开发板上的运用
目录 前言一、硬件准备二、硬件接线说明串口接线示意图:I2C接先示意图 三、软件搭建及测试1、使用Arduino IDE编译教程2、使用vsCode+Arduino教程2.1 在vsCode上使用Arduino的环境搭建2.2 配置烧录和测试 3、使用vsCode+PlatformIO编译教程 四、源代码串口版本源代码:I2C版本原代码 五:常见问题 前言 此文档介绍了北醒系列激

Benewake(北醒) TF02-i-CAN 雷达在Ardupilot (APM)上基于PixHawk的运用
目录 一、前言二、TF02-i-CAN 配置三、接线四、飞控参数设定4.1 避障的常用设置4.2 避障测试4.3 定高的常用设置4.4 定高测试 五、常见问题 一、前言 TF02-i CAN PixHawk1 CAN 端口或任何已刷新 Ardupilot 固件并具有 CAN 接口的飞控连接。 从 Copter 4.1.4 开始,Ardupilot 固件添加了对 CAN 协议的支持

Benewake(北醒) 单点TF系列雷达【通用指令串口助手】使用说明
目录 一、硬件准备1:连接设备2:串口连接以及读数 二、通信接口说明1. UART2. IIC3. 4854. CAN 三、常见问题1 连接串口后无数据 一、硬件准备 1:连接设备 连接『TF系列产品』、『TTL - USB 转接板』和『USB 线』,确保无松动,再将『USB 线』与『电脑』连接。 2:串口连接以及读数 打开串口助手,选择对应 COM 口以及波特率后,

Benewake(北醒) TF-Luna/TFmini-S/TF03 串口版本雷达在树莓派 Raspberry Pi 上的运用(Python)
目录 Raspberry Pi 接口定义正确连接所需的定制电缆:接线示意图:Python code: 完整代码 英文版本请参考参考以下链接 链接: https://pan.baidu.com/s/1D0n11Mz2odnOAju-TNJ5kQ 提取码: xf5u 本文介绍了如何将北醒单点雷达TFluna/TFmini-S/TF02-pro/TF03与 Raspberry

Benewake(北醒) 单点TF系列雷达在开源飞控F4上的运用
目录 一、文档说明二、设备和接线说明三、地面站和F4固件说明四、Betaflight 和Cleanflight 地面站的调试五、Inavflight 地面站的调试六、注意事项 一、文档说明 气压计作为目前飞控高度测量的主要传感元器件,虽然满足大多数时候的定高需要,但是精度差强人意,尤其是在高级飞行中,例如自动化起飞和着陆很难确保气压数据的准确性,为了实现高精度的测距定高(地形模
Benewake(北醒) TFmini-i-CAN 雷达在Ardupilot (APM)上基于PixHawk的运用
目录 一、前言二、TFmini-i-CAN 配置三、接线四、飞控参数设定4.1 避障的常用设置4.2 避障测试4.3 定高的常用设置4.4 定高测试 五、常见问题 一、前言 TFmini-i CAN PixHawk1 CAN 端口或任何已刷新 Ardupilot 固件并具有 CAN 接口的飞控连接。 从 Copter 4.1.4 开始,Ardupilot 固件添加了对 CAN 协

Benewake(北醒) TF-Luna (TTL) 雷达在WiFi LoRa 32 (V2)基于Arduino IDE上的运用
目录 前言硬件介绍TF-Luna 简要说明【WiFi LoRa 32 (V2)】硬件介绍产品图片技术参数介绍电气参数介绍引脚定义介绍 【WiFi LoRa 32 (V2)】基于Arduino IDE编译环境搭建前置说明 通过Arduino IDE进行环境搭建下载Arduino-ESP32开发环境支持下载Heltec ESP32库 【WiFi LoRa 32 (V2)】测试 北醒TF-luna

Benewake(北醒) 短距 TF-LC02 2m资料整理
目录 1 TF-LC02简要说明1.1 性能参数1.2产品图片及尺寸 2 运用2.1 在开源板Arduino上的运用2.2 在Python上的应用 1 TF-LC02简要说明 1.1 性能参数 1.2产品图片及尺寸 2 运用 2.1 在开源板Arduino上的运用 日期内容备注2021.12.24Benewake(北醒) TF-LC02 (TTL) 雷达使用TT

Benewake(北醒) TFmini-S\TFmini Plus\TF-Luna\TF02-Pro 串口版本雷达在Arduino Nano上的例程
目录 TFLidar_Arduino_HardwareSerial_Polling接线定义代码输出 TFLidar_Arduino_HardwareSerial_Interrupt接线定义代码输出 TFLidar_Arduino_SoftwareSerial接线定义代码输出 TFLidar_Arduino_SoftwareSerial_Multiple接线定义代码输出 TFLidar_Ard

Benewake(北醒) 短距 TFmini Plus 12m介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 通用上位机测试说明3.3 通用指令串口助手使用说明3.4 产品快速测试说明3.5 操作视频 4 基于开源硬件的运用整理4.1 在开源飞控上的运用4.2 在开源Arduino上的运用4.3 在Raspberry(树莓派)上的运用说明4.4 在STM32上的运用4.5 在51系列单片机上的运用4.6 在ESP32上的

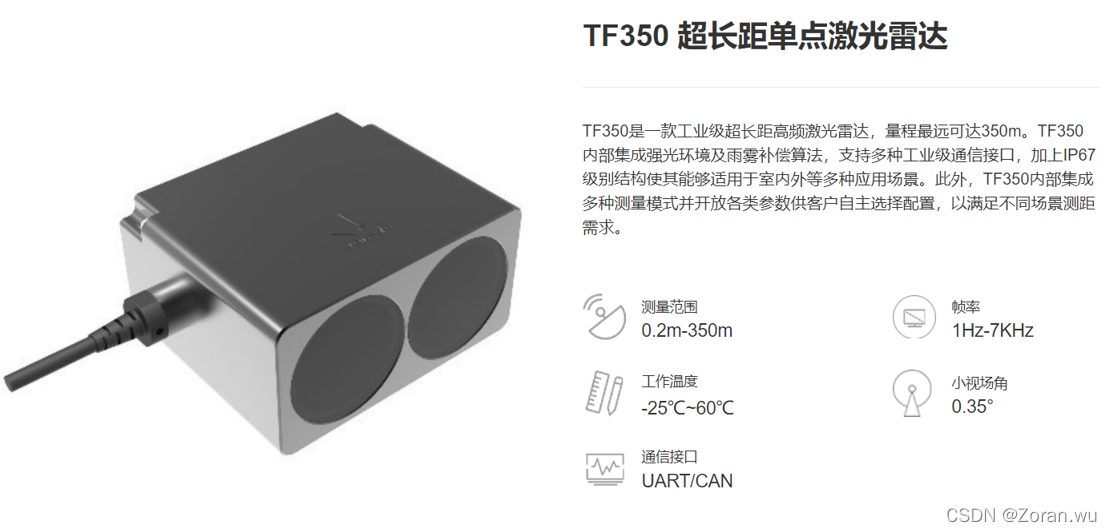
Benewake(北醒) 长距 TF350 350m介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 通用上位机测试说明3.3 通用指令串口助手使用说明3.4 产品快速测试说明 4 基于开源硬件的运用整理4.1 在开源飞控上的运用4.2 在开源Arduino上的运用4.3 在Raspberry(树莓派)上的运用说明4.4 在STM32上的运用4.5 在51系列单片机上的运用 5 其它的运用整理5.1 在Linux
Benewake(北醒) 单点TF系列雷达标品介绍
目录 TF-Luna 简要说明TFmini-S 简要说明TFmini Plus 简要说明TF02-Pro 简要说明TF03 简要说明TF350 简要说明 北醒产品资料下载官网链接:http://www.benewake.com/product TF-Luna 简要说明 TFmini-S 简要说明 TFmini Plus 简要说明 TF02-Pro 简要说明

Benewake(北醒) TF-Luna/TFmini-S/TFmini Plus/TF02-Pro 在IIC模式下的使用说明
目录 连接PC端进行测试所需工具以及连接方法:通用串口助手使用方法: TF-Luna1、IIC模式切换2、IIC模式下距离读取说明3、串口模式恢复说明 TFmini-S1、IIC模式切换2、IIC模式下距离读取说明3、串口模式恢复说明 TFmini-Plus1、IIC模式切换2、IIC模式下距离读取说明3、串口模式恢复说明 TF02-Pro1、IIC模式切换2、IIC模式下距离读取说明3、串

Benewake(北醒) 短距 TFmini-S 12m介绍以及资料整理
目录 1 前言2 产品介绍3 产品快速测试3.1 产品规格书及使用说明书3.2 通用上位机测试说明3.3 通用指令串口助手使用说明3.4 产品快速测试说明3.5 操作视频 4 基于开源硬件的运用整理4.1 在开源飞控上的运用4.2 在开源Arduino上的运用4.3 在Raspberry(树莓派)上的运用说明4.4 在STM32上的运用4.5 在51系列单片机上的运用4.6 在ESP32上的