本文主要是介绍Benewake(北醒) 单点TF系列雷达在 ESP32 DEVKIT_V1 开发板上的运用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 前言
- 一、硬件准备
- 二、硬件接线说明
- 串口接线示意图:
- I2C接先示意图
- 三、软件搭建及测试
- 1、使用Arduino IDE编译教程
- 2、使用vsCode+Arduino教程
- 2.1 在vsCode上使用Arduino的环境搭建
- 2.2 配置烧录和测试
- 3、使用vsCode+PlatformIO编译教程
- 四、源代码
- 串口版本源代码:
- I2C版本原代码
- 五:常见问题
前言
此文档介绍了北醒系列激光雷达在ESP32 DEVKIT_V1开发板上的运用,其中包含了
- 两种雷达的接口 TTL和IIC
- 三种编译方式 通过Arduino IDE \ vsCode+Arduino \ vsCode+PlatformIO
此文档的编译代码可以在Github上下载:https://github.com/benewake-zoran/ESP32-DEVKIT_V1
一、硬件准备
- 北醒TF系列雷达一台(相关可参考论坛首页产品介绍)https://blog.csdn.net/zoran_wu/article/details/109445751
- ESP32 DEVKIT_V1开发板一块
- MicroUSB数据线一条
- 杜邦线若干
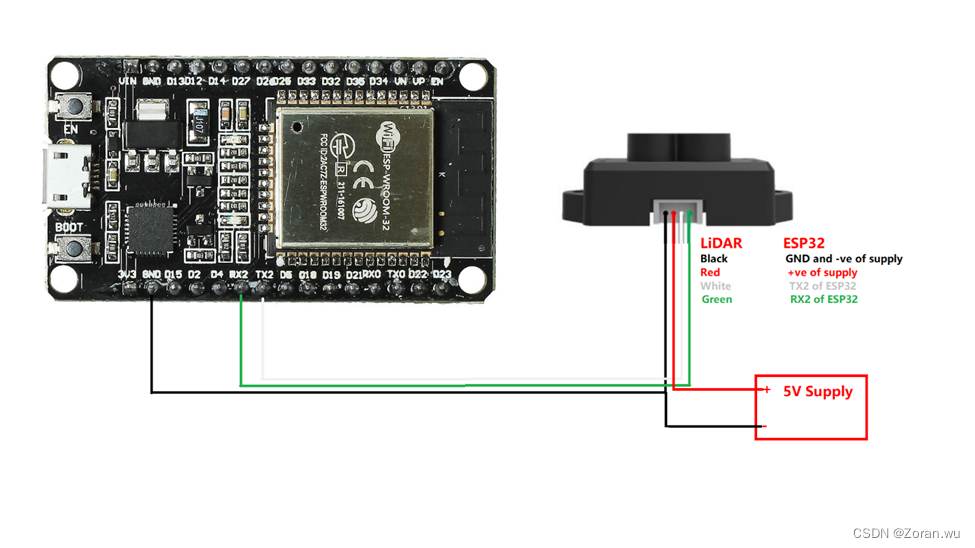
二、硬件接线说明
串口接线示意图:
I2C接先示意图
待添加
三、软件搭建及测试
1、使用Arduino IDE编译教程
环境搭建:关于ESP32 DEVKIT_V1板子资料及环境搭建可以参考
https://blog.csdn.net/zoran_wu/article/details/123224154
2、使用vsCode+Arduino教程
2.1 在vsCode上使用Arduino的环境搭建
参考:【vsCode + Arduino】在Visual Studio Code编译Arduino项目
https://blog.csdn.net/zoran_wu/article/details/127630939
2.2 配置烧录和测试
步骤一: 使用vsCode打开Arduino建好的ino,项目文件,选择对应的开发板DOIT DEVKIT_V1
步骤二: 选择对应的编译器
步骤三: 选择对应COM口并编译,如果COM口正常(以下COM口处理略过)
如果没有COM口,请确认板子是否已经正常连接,对应驱动是否已经正常安装,此处可以参考
关于ESP32 DEVKIT_V1板子资料及环境搭建可以参考
https://blog.csdn.net/zoran_wu/article/details/123224154
步骤四: 此处一般会出现一个编译警告,如下图,通过更改json来避免此警告,并加速编译(此处参考待添加)
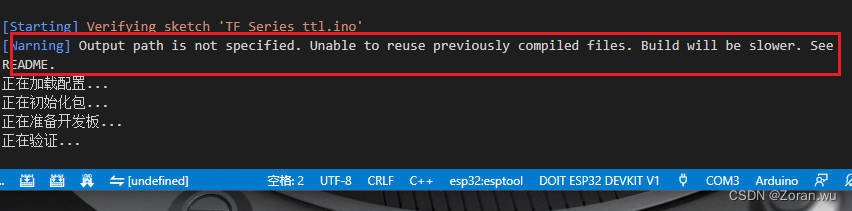
添加一句"output": “./Arduino/build”,如下所示
步骤五: 编译后进行烧录
烧录方式:先按住BOOT键点烧录,待出现正在上传时可以放开并开始烧录
步骤六: 测试
此处手动打开串口监控器,开始打印雷达数据
3、使用vsCode+PlatformIO编译教程
参考:【vsCode + PlatformIO】在Visual Studio Code编译Arduino项目
https://blog.csdn.net/BX_Zoran/article/details/123707123
四、源代码
串口版本源代码:
// Note the format for setting a serial port is as follows: Serial2.begin(baud-rate, protocol, RX pin, TX pin);
#define RXD2 16
#define TXD2 17
int dist; /*----actual distance measurements of LiDAR---*/
int strength; /*----signal strength of LiDAR----------------*/
float temprature;
unsigned char check; /*----save check value------------------------*/
int i;
unsigned char uart[9]; /*----save data measured by LiDAR-------------*/
const int HEADER = 0x59; /*----frame header of data package------------*/
int rec_debug_state = 0x01; // receive state for frame
void Get_Lidar_data();
void setup()
{delay(2000);Serial.begin(115200);Serial.println("\nBenewake TFmini-S UART LiDAR Program");Serial2.begin(115200);
}
void loop()
{Get_Lidar_data();
}
void Get_Lidar_data()
{if (Serial2.available()) // check if serial port has data input{if (rec_debug_state == 0x01){ // the first byteuart[0] = Serial2.read();if (uart[0] == 0x59){check = uart[0];rec_debug_state = 0x02;}}else if (rec_debug_state == 0x02){ // the second byteuart[1] = Serial2.read();if (uart[1] == 0x59){check += uart[1];rec_debug_state = 0x03;}else{rec_debug_state = 0x01;}}else if (rec_debug_state == 0x03){uart[2] = Serial2.read();check += uart[2];rec_debug_state = 0x04;}else if (rec_debug_state == 0x04){uart[3] = Serial2.read();check += uart[3];rec_debug_state = 0x05;}else if (rec_debug_state == 0x05){uart[4] = Serial2.read();check += uart[4];rec_debug_state = 0x06;}else if (rec_debug_state == 0x06){uart[5] = Serial2.read();check += uart[5];rec_debug_state = 0x07;}else if (rec_debug_state == 0x07){uart[6] = Serial2.read();check += uart[6];rec_debug_state = 0x08;}else if (rec_debug_state == 0x08){uart[7] = Serial2.read();check += uart[7];rec_debug_state = 0x09;}else if (rec_debug_state == 0x09){uart[8] = Serial2.read();if (uart[8] == check){dist = uart[2] + uart[3] * 256; // the distancestrength = uart[4] + uart[5] * 256; // the strengthtemprature = uart[6] + uart[7] * 256; // calculate chip tempraturetemprature = temprature / 8 - 256;Serial.print("dist = ");Serial.print(dist); // output measure distance value of LiDARSerial.print('\n');Serial.print("strength = ");Serial.print(strength); // output signal strength valueSerial.print('\n');Serial.print("\t Chip Temprature = ");Serial.print(temprature);Serial.println(" celcius degree"); // output chip temperature of Lidarwhile (Serial2.available()){Serial2.read(); // This part is added becuase some previous packets are there in the buffer so to clear serial buffer and get fresh data.}delay(100);}rec_debug_state = 0x01;}}
}
I2C版本原代码
五:常见问题
这篇关于Benewake(北醒) 单点TF系列雷达在 ESP32 DEVKIT_V1 开发板上的运用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









