v1专题

TokuDB7.5.7-2.4.1使用TokuDB时的内存注意事项v1
tokudb_cache_size指定TokuDB自己的cache大小,该值默认会为50%的RAM(?TokuDB will allocate 50% of the installed RAM for its own cache)。在如下集中情况,需要手动配置tokudb_cache_size的值: 1 TokuDB和其他占内存型的任务一起跑在同一台机器上 一个保收的配置是其他所有任务都在运行

TokuDB7.5.7-2.1使用TokuDB的系统和硬件需求v1
1 操作系统需求 TokuDB到目前位置只支持64位的Linux系统(所以现在不支持在window上编译运行) 2 硬件需求 内存:至少1G;如果想较好性能,建议2G以上。 外存:建议为数据目录(tokudb_data_dir)和日志目录(tokudb_log_dir)配置足够大的存储空间。
MySQL变量-binlog_format:决定binlog的存储格式v1
1 global和session都可 2 三个值: STATEMENT:sql语句的格式 ROW:具体数据行记录的格式 MIXED:混合格式

爆改YOLOv8|利用全新的聚焦式线性注意力模块Focused Linear Attention 改进yolov8(v1)
1,本文介绍 全新的聚焦线性注意力模块(Focused Linear Attention)是一种旨在提高计算效率和准确性的注意力机制。传统的自注意力机制在处理长序列数据时通常计算复杂度较高,限制了其在大规模数据上的应用。聚焦线性注意力模块则通过优化注意力计算的方式,显著降低了计算复杂度。 核心特点: 线性时间复杂度:与传统的自注意力机制不同,聚焦线性注意力模块采用了线性时间复杂度的计算方法

docker pull报错: Error response from daemon: Get https://../v1/_ping: http: server gave HTTP response
问题描述,安装好docker私有库之后,不管是从私有库pull还是push,都会报错: Error response from daemon: Get https://xxx.xxx.xxx.xxx:5000/v1/_ping: http: server gave HTTP response to HTTPS client 原因是由于客户端采用https,docker registry未采用h

CV-笔记-重读YOLO目标检测系列 v1
目录 如何检测定义label训练的时候损失函数缺点引用 将对象检测定义为一个回归问题,回归到空间分离的边界框和相关的类概率。与最先进的检测系统相比,YOLO会产生更多的定位错误,但不太可能预测背景上的误报less likely to predict false positives on background(假阳少)都看做一个回归问题,所以不需要复杂的pipeline。titan

ModuleNotFoundError: No module named ‘transformers_modules.chatglm-6b-v1‘
ModuleNotFoundError: No module named 'transformers_modules.chatglm-6b-v1' 欢迎来到英杰社区https://bbs.csdn.net/topics/617804998 欢迎来到我的主页,我是博主英杰,211科班出身,就职于医疗科技公司,
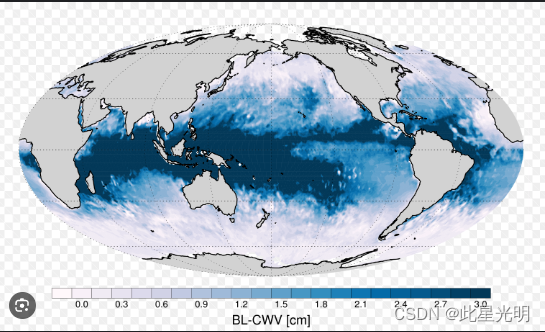
AMSR-MODIS 边界层水汽 L3 每日 1 度 x 1 度 V1、V2 版本数据集
AMSR-MODIS Boundary Layer Water Vapor L3 Daily 1 degree x 1 degree V1 (AMDBLWV) at GES DISC AMSR-MODIS Boundary Layer Water Vapor L3 Daily 1 degree x 1 degree V2 (AMDBLWV) at GES DISC 简介 该数据集可估算均匀云

Tensorflow训练MobileNet V1 retrain图片分类
1.数据准备 (1)建立TrainData文件夹 (2)在该文件夹内将你将要训练分类的属性按照类别建立对应的文件夹 (3)将各个类别图片放入对应文件夹 (4)在当前目录下建立labels.txt和label_map.txt两个文件。 label_map.txt内容为:

imx6q led灯驱动及测试代码(自动创建设备文件v1)
驱动层代码 /*************************************************************************> File Name: led_drv.c> Author: XXDK> Email: v.manstein@qq.com > Created Time: Sun 26 Feb 2017 04:28:00 AM PST

webapi用Swashbuckle.AspNetCore报Internal Server Error /swagger/v1/swagger.json错误,解决
解决办法 必须要将所有的action方法头都要加上 [Route(“api/report/page”)],比如[HttpPost(“TargetSourse”)],比如 [Route(“api/report/page”)],此处为简写 参考代码 [Route("[controller]")]public class ChartDataController : Controller{
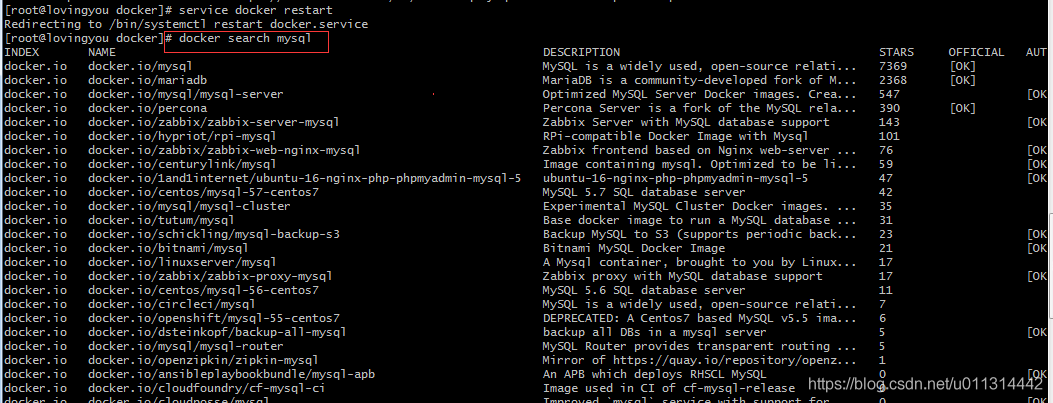
解决:Error response from daemon: Get https://index.docker.io/v1/search?q=openjdkn=25: dial tcp: looku
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到教程。 1. 我只是想查一个 mysql 镜像。执行命令: docker search mysql 。报错如下: Error response from daemon: Get https://index.docker.io/v1/search?q=openjdk&n=25: dial tcp
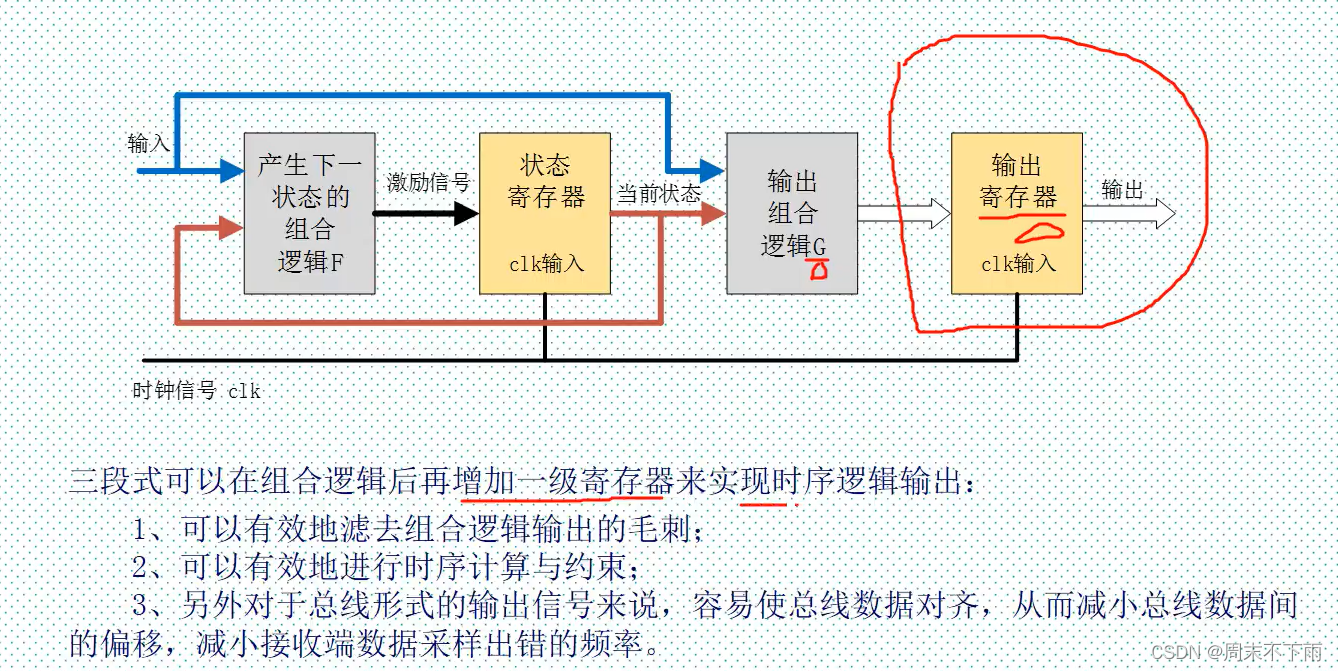
FPGA新起点V1开发板(八-语法篇)——状态机
文章目录 一、两个状态机模型二、状态机设计(四段论)2.1 状态空间定义2.2 状态跳转(时序逻辑)2.3 下个状态判断(组合逻辑)2.4 各个状态下的动作2.5 三段式 一、两个状态机模型 二、状态机设计(四段论) 1.状态空间定义 2.状态跳转 3.下个状态判断 4.各个状态下的动作 2.1 状态空间定义 状态空间+状态寄存器 状态寄存器的位宽跟状态空间保持一致
Ubuntu14.04下搭建Kinect V1的环境
请各位注意是kinect V1,kinect有两个版本,V1和V2 如有任何问题,feel free to contact me at baidongdong@nudt.edu.cn 1.安装依赖项 sudo apt-get install git build-essential python libusb-1.0-0-dev freeglut3-devsudo apt-get ins
GoldenEye-v1(vulnhub)靶机练习实践报告
GoldenEye-v1****靶机练习实践报告 一、安装靶机 靶机是.ova文件,需要用VirtualBox打开,但我习惯于使用VMWare,因此修改靶机文件,使其适用于VMWare打开。 解压ova文件,得到.ovf文件和.vmdk文件。 用记事本打开.ovf文件并修改“vssd:VirtualSystemType”为自己的VMWare版本,此处我用的是是vmx-15.5.1。
GoogLeNet论文解读—Going deeper with convolutions2015(V1)
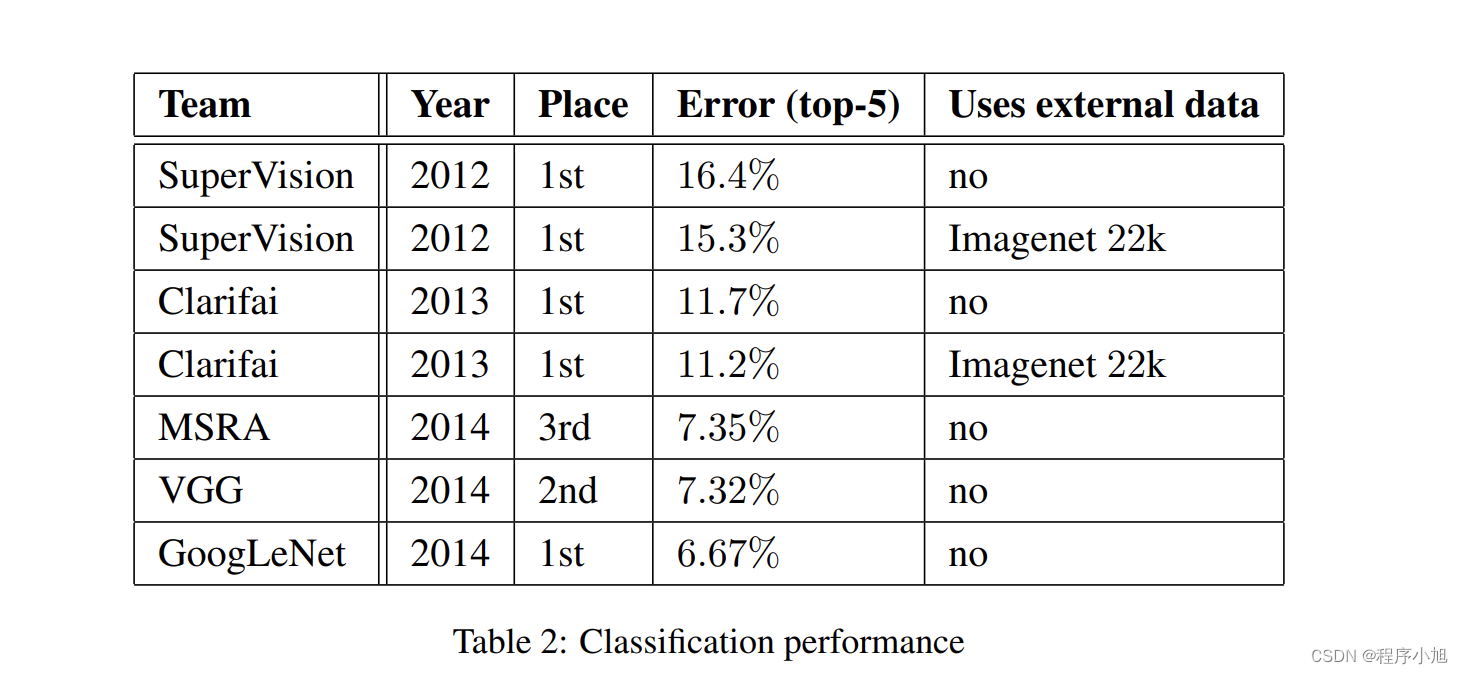
GoogLeNet论文解读—Going deeper with convolutions2015 说明:本文只解读GooleNet的14年参赛的v1版本,之后的改进版本可能在日后的学习中继续更新 研究背景 更深的卷积神经网络 认识数据集:ImageNet的大规模图像识别挑战赛 LSVRC-2014:ImageNet Large Scale Visual Recoanition C

使用Vivado和PetaLinux 2019.2的Ultra96 v1 ResNet-50例程
使用Vivado和PetaLinux 2019.2的Ultra96 v1 ResNet-50例程 Vivado步骤 Reference Design Matrix The Hardware design is simplified by a Tcl script which generates the Block Diagram, the wrapper, and the constrai

深入探索Android签名机制:从v1到v3的演进之旅
引言 在Android开发的世界中,APK的签名机制是确保应用安全性的关键环节。随着技术的不断进步,Android签名机制也经历了从v1到v3的演进。本文将带你深入了解Android签名机制的演变过程,揭示每个版本背后的技术细节,并探讨它们对开发者和用户的影响。 一、签名机制 1、什么是Android签名? 在Android生态中,APK签名机制是确保应用安全性的重要环节。

Android Studio 打包签名Signature Version V1 V2说明
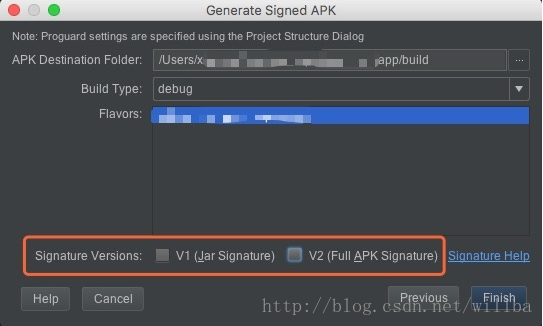
在进行打包流程中有一项需要选择签名版本: signature version的区别 V1:可对签名后的文件,作适当修改,并重新压缩。 V2:不能对签名后的 APK作任何修改,包括重新解压。因为它是针对字节进行的签名,所以任何改动都会影响最终结果。 正确选择姿势: 1.只勾选v1签名所有机型都能用,但是在7.0及以上不会使用更安全的验证方式; 2.只勾选V2签名7.0以下机型
org.xmlpull.v1.XmlPullParserException: preconditon: START_TAG
今天服务器返回的xml中加了很多字段,然后其他的字段都可以解析出来,但是解析到某一个字段AllCount 抛出一个异常,找了一下午才找到这个异常,以前写代码的人这个异常没有被打印出来的,打断点才找到的,,,是在 parser.nextText()中抛出的 完整的异常: W/System.err: org.xmlpull.v1.XmlPullParserException: preconditio
浅谈:android签名打包v1和v2的区别
为什么要谈这个问题: 故事发生的原因:我这边做了正式的签名后(v1和v2同时勾选,产生正式的apk),拿给后台,后台再对我的apk签名再进行处理(截取部分签名后,然后重新签名,打入渠道号)!最后神奇的现象发生了,经过后台处理后的apk在7.0以下的手机是可以安装的,7.0及以上的手机是不能安装! 这里就不能不重点介绍以下v1和V2签名了: 这里可以看到:v1签名是对jar进行签名,V2签名是
Stable Diffusion Ai绘画模型推荐:二次元Coriander_Mix v1大模型推荐
负tag嵌入式:EasyNegative,badhandv4 此模型经测试是写实偏3D的效果 画质灰暗的话请加:VAE840000 或者负tag:(watermark:2),(blurry:2),fat,paintings,sketches,(worst quality:2),(low quality:2),(normal quality:2),((monochrome)), ((gray

pyecharts绘制世界动态轨迹图(v0.5.X与v1.X版本对比)
一、问题引入 pyecharts官网:https://pyecharts.org/#/zh-cn/intro 在使用Geo或者GeoLines绘制动态轨迹图时,如果所选地区是中国的省份或者城市,是能够匹配到对应的经纬度并且正常绘制的;如果所选地区涉及到其他国家或者国外城市,则因无法匹配到对应的经纬度而绘制失败:ValueError(“No coordinate is specifi
MySQL与金蝶云星空对接集成执行查询语句-v2打通销售退货新增V1
MySQL与金蝶云星空对接集成执行查询语句-v2打通销售退货新增V1 数据源系统:MySQL mysql是一个关系数据库管理系统(RDBMS),所谓的关系型数据库,是建立在关系模型基础上的数据库,借助于集合代数等数学概念和方法来处理数据库中的数据。 目标系统:金蝶云星空 金蝶K/3Cloud结合当今先进管理理论和数十万家国内客户最佳应用实践,面向事业部制、多地点、多工厂等运营协
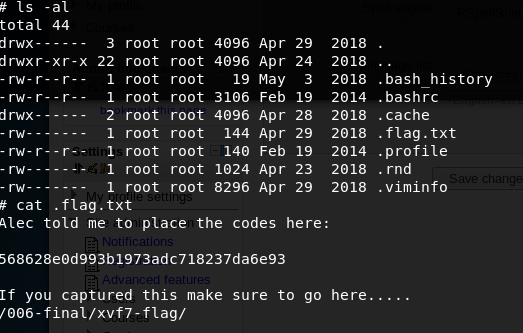
CH4INRULZ-v1靶机练习实践报告
CH4INRULZ-v1靶机练习实践报告 1 安装靶机 靶机是.ova文件,需要用VirtualBox打开,但我习惯于使用VMWare,因此修改靶机文件,使其适用于VMWare打开。 解压ova文件,得到.ovf文件和.vmdk文件。直接用VMWare打开.ovf文件即可。 2 夺旗步骤 第一步:IP扫描,端口扫描 端口扫描发现靶机上注册了ftp服务、ssh服务、Apache服

SAP 修改SO BAPI报错在配置和销售凭证 1 间通信时内部出错(V1 854)
1.背景 在多次使用修改SO BAPI BAPI_SALESORDER_CHANGE的时候由于缓存未清空,可能会报错“在配置和销售凭证 &1 间通信时内部出错”(Internal error in communication between configuration and sales doc.&1),对应的消息为V1 854 2.解决 在调用BAPI BAPI_SALESORDER_CH