减速专题
14 学习PID--步进电机梯形加减速实现原理
步进电机加减速使用的场景有那些呢?为什么要使用加减速呢? 硬件驱动细分器与软件的细分参数或定时器分频参数设置不当时启动电机时,会遇见步进电机有啸叫声但是不会转动,这是因为软件产生脉冲的频率大于步进电机的启动频率,步进电机有一个很重要的技术参数:空载启动频率,也就是在没有负载的情况下能够正常启动的最大脉冲频率,如果脉冲频率大于该值,步进电机则不能够正常启动,发生丢步或者堵转的情况。或者也可

使用FFmpeg打水印,加速减速播放以及4宫格播放视频
1、FFmpeg为视频添加水印 .\ffmpeg.exe -i .\tou6.mp4 -vf "drawtext=fontfile=SimHei.ttf: text='Head camera of baxter(Long distance)':x=10:y=10:fontsize=50:fontcolor=yellow:shadowy=2" tou6_2.mp4 SimHei.ttf:是wi
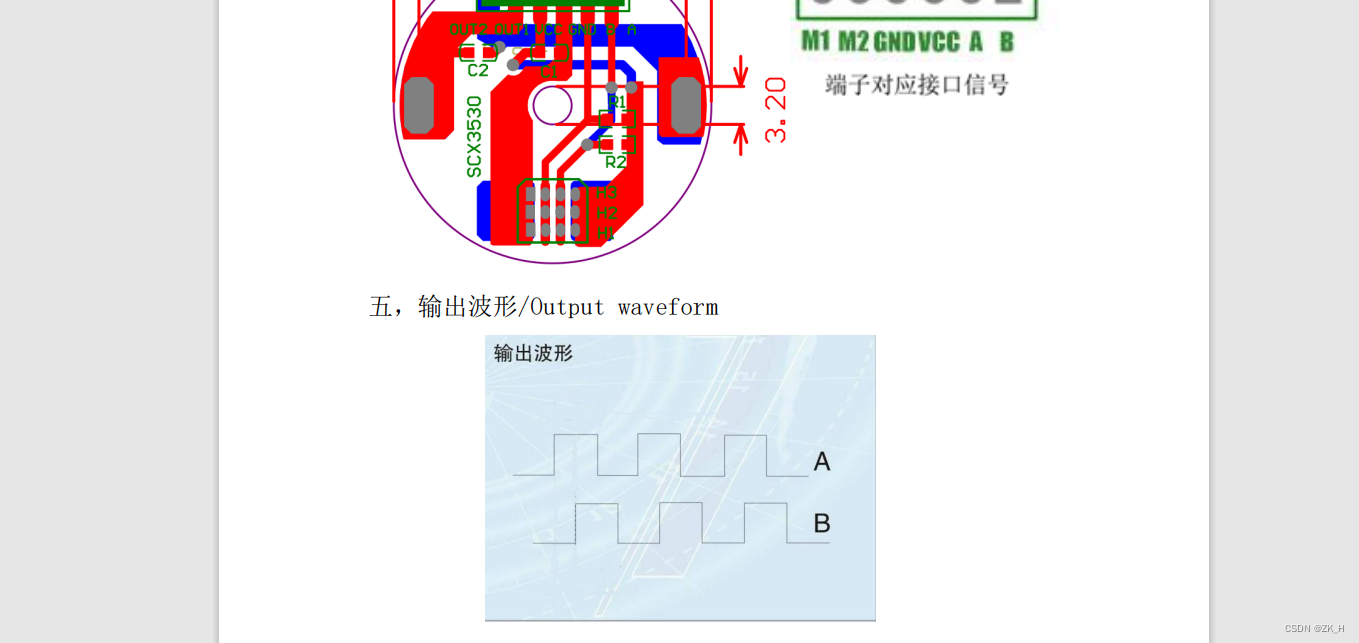
STM32驱动带编码器的直流减速电机
STM32驱动带编码器的直流减速电机 文章目录 STM32驱动带编码器的直流减速电机硬件材料MG310 直流减速电机直流电机原理减速器实物接线霍尔编码器 TB6612电机驱动接线说明程序设计定时器生成PWM驱动电机速度计算 实验结果程序下载 硬件材料 主控板:STM32F407ZG直流减速电机:MG310(霍尔编码)电机驱动:TB66127.4V电源 MG310 直流减速
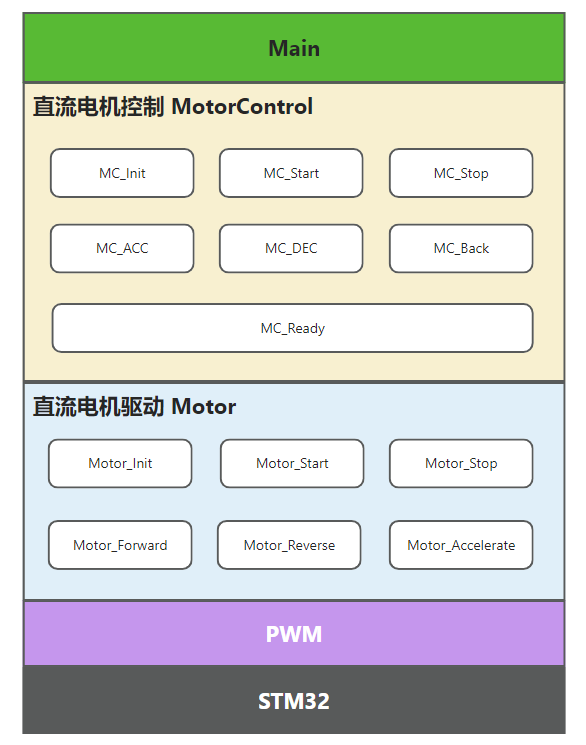
stm32驱动直流电机实现启动/加速/减速/倒车/停车等功能
不积跬步,无以至千里;不积小流,无以成江海。 大家好,我是闲鹤,公众号 xxh_zone,十多年开发、架构经验,先后在华为、迅雷服役过,也在高校从事教学3年;目前已创业了7年多,主要从事物联网/车联网相关领域和业务。 喜欢交友、骑行、写毛笔字、弹吉他、折腾硬件和写代码。 ps: 如对以下内容有疑问或者咨询,可进行留言 或 添加我的微信公众号留言 原理 使用 PWM 输出脉冲信号直流电机

cocos2d-x动画加速与减速
动画是游戏的必然要素之一,在整个游戏过程中,又有着加速、减速动画的需求。以塔防为例子,布塔的时候希望能够将游戏减速,布好塔后,则希望能将游戏加速;当某个怪被冰冻后,移动速度减缓,而其他怪的移动速度不变。cocos2d-x引擎为我们提供了很强大的接口,下面就将我实验的过程复述一遍,也方便他人。 1)实现全局的加速、减速。 通过设置Scheduler的timeScale,可以实现全局的加、减

【iOS-Cocos2d游戏开发之二十二 】CCSpeed实现CCAnimate动画进行时设置慢动作以及设置游戏加减速进行(塔防游戏必备)! .
Himi 原创, 欢迎转载,转载请在明显处注明! 谢谢。 原文地址:http://blog.csdn.net/xiaominghimi/article/details/7009503 最近也一直在忙,所以也只能每周的某一天抽出时间来分享一些知识点给童鞋们,希望童鞋们体谅下~

梯形加减速算法原理优缺点及对步进电机的控制
目录 步进电机梯形加减速实现 1. 梯形加减速算法原理详解 1.1. 算法特点 1.2. 算法基础概念及方程 1.3. 直线加减速模型解析 1.4. 脉冲时间间隔的精确计算 1.5. 加减速度与步数的关系 1.6. 算法理论实现 1.6.1. 设置计算 1.6.2. 加减速情况分析 1.6.3. 第一种情况 1.6.4. 第二种情况 1.7. 中断状态区分 2. 梯
PID算法控制5840-31ZY编码器直流减速电机旋转特定角度(一)
模块分析 在本工程中,使用stm32做主控芯片输出PWM波,TB6112做电源驱动带动5840-31ZY编码器直流减速电机旋转特定角度 有如下模块 TB6112驱动模块 TB6112是性能优于常见L298N的一款电机驱动芯片,体积更小效率更高发热少 其接线如图,其中通过BIN2,BIN1分别输入高低电平,可以控制BO2,BO1对应输出高低电平,从而实现对直流电机旋转方向的设定 #i

直流减速电机以及PID控制简单理论
打算自己做一个平衡小车,PID和带编码盘的直流减速电机自然就是最重要的俩个了,昨天刚从网上买了电机,但是内心的冲动使我无法等待,既然电机还没回来就先把一些简单的理论以及知识点学习一下吧。 减速电机 直流电机转速快(一般10000rpm),扭矩小(0.1kg/cm左右),所以用减速来降低转速,提高扭矩,减速电机的减速方式有:齿轮减速、蜗轮蜗杆减速以及行

三角函数柔性加减速算法
公式推导 三段速度公式为 { v ( t ) = ( v s + v m ) / 2 − ( v m − v s ) c o s t ′ / 2 t ′ = ( t / t 1 ) π ( 1 ) v ( t ) = v m v ( t ) = ( v e + v m ) / 2 − ( v e − v m ) c o s t ′ / 2 t ′ = ( t / t 2 ) π t
arduino uno R3驱动直流减速电机(蓝牙控制)
此篇博客用于记录使用arduino驱动直流减速电机的过程,仅实现简单的功能:PID调速、蓝牙控制 1、直流减速电机简介2、DRV8833电机驱动模块简介3、HC-05蓝牙模块简介电机转动测试4、PID控制5、蓝牙控制电机 1、直流减速电机简介 我在淘宝购买的电机,减速比是21.3,旋转一圈产生的脉冲数是11,这样实际通过编码区采集到的一圈脉冲数(使用一倍频计数)是11×21.3
STM32步进电机加减速
电机的加减速为了,电机启动停止更加稳定,提高匀速速度。S曲线算法优化电机的运行。 整个过程就是,模仿S曲线设置电机的频率 程序采用,通过s_curve()函数映射一张小于1500个点的表, 输出一次pwm方波,中断一次,计数器step计数一次 ,TIM_SetAutoreload()重新设置arr频率。 S曲线函数,加速和减速同理,返回值是表的个数 uint16_t _

一起玩儿Proteus仿真(C51)——04. 直流电机的启停、加减速和正反转仿真(L298)(二)
摘要:本文介绍PWM信号的产生办法和直流电机的启停、加减速和正反转的仿真程序的编写方法 前边已经介绍了2中生成PWM信号的方法了。那么怎样才能节省一下资源,只使用一个定时器呢?这就是介绍的第三种方法,单定时器中断法生成PWM信号,这也是我们这次仿真程序所使用的方法。其基本原理就是通过一个定时器来不停的翻转输出引脚的电平高低来达到输出PWM信号的目的,但是如何控制频率和占空比呢?这就需要不
第6节、T型加减速转动【51单片机+L298N步进电机系列教程】
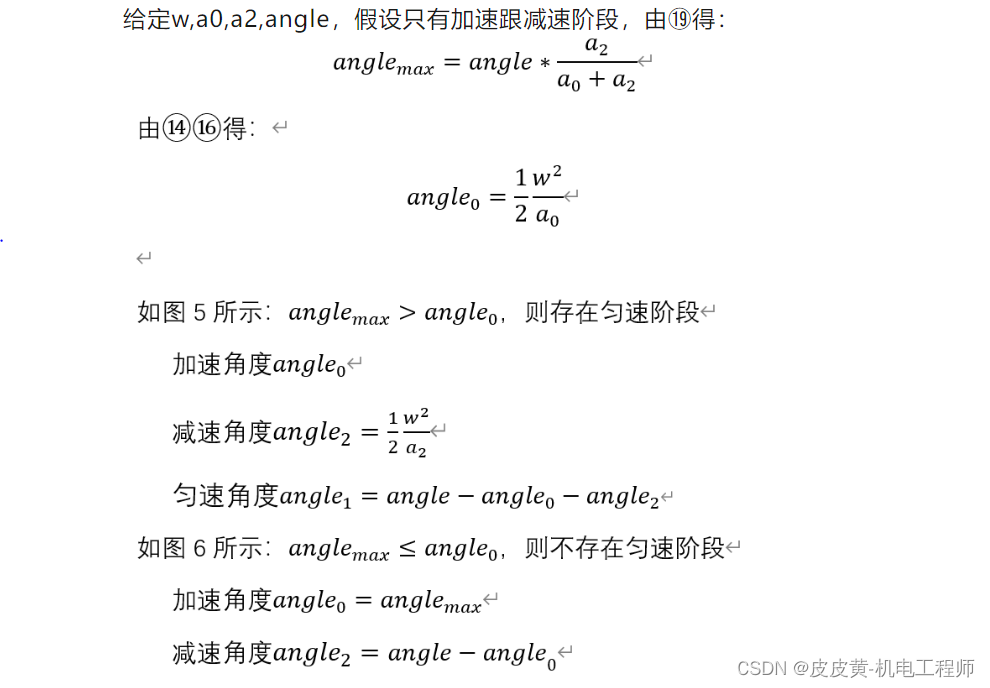
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本章介绍步进电机T型加减速的控制方法,分三个小节,本小节主要内容为该控制方法的推导与计算。目前各平台对该控制方法介绍的文章目前较多,但部分关键参数并未给出推导过程,例如误差系数0.676的推导等,本节在现有文章框架下,对推导过程进行了梳理 目录 一. 加速阶段 1.1计算时间与步数关系 1.2计算时间间隔递推关系 1.3误差分析 1.4
第5节、S曲线加减速转动【51单片机+L298N步进电机系列教程】
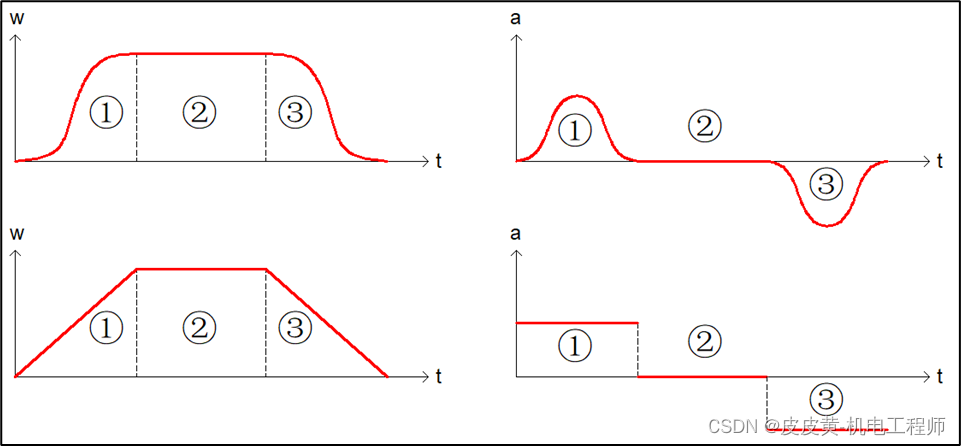
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本节介绍步进电机S曲线相关内容,总共分四个小节讨论步进电机S曲线相关内容 5-1、S曲线加减速简介 根据上节内容,步进电机每一段的速度可以任意设置,但是每一段的速度都会跳变,当这个跳变值比较大的时候,电机会发生明显的抖动,或直接产生丢步,所以在速度变化的过程需要有缓冲阶段,即加减速过程 加减速通常的处理方式有S曲线加减速、匀加减速、指数
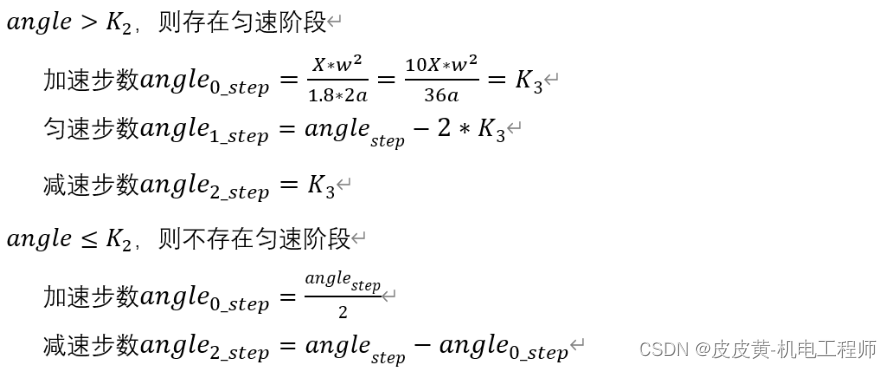
6-2、T型加减速计算简化【51单片机+L298N步进电机系列教程】
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本节介绍简化T型加减速计算过程,使其适用于单片机数据处理。简化内容包括浮点数转整型数计算、加减速对称处理、预处理计算 一、浮点数转整型数计算 根据上一节内容已知 常用的晶振大小为11.0592MHz和12MHz,此处统一为12 二、加减速对称处理 为简化计算量,设定加减速过程对称,即a0=a2=a 2.1加速+减速阶段 2.2判断

手机APP判断用户驾驶行为——急加速急减速急转弯
目录: 1、数据来源; 2、方案选择; 3、如何测试; 4、测试效果; 1、数据来源: 强推一个传感器测试输出软件,能作为实时示波器,还能导出数据,还能在同个wifi下在电脑端查看,妥妥的手机测试神器,简化测试流程,导出来的数据xls和csv两种格式,我贴到txt中直接就可以用了 不过他输出的数据有时候太多,我们需要自己重新采样,涉及到excel的操作,在新开一篇来说; 2、方案选择 看了很多

S形曲线加减速--7段
S加减速–7段 接前文5段S形速度规划,这里推导一下7段S形曲线的计算公式 1. S加减速曲线 定义:上图中,令t1-t7为各个位置的绝对时间节点,T1-T7为每一段的增量时间节点。这里的定义和图中有些出入,线下面的计算全部按照此定义为准. 计算公式:加加速度 j ( t ) = { J 0 ≤ t ≤ t 1 0 t 1 ≤ t ≤ t 2 − J t 2 ≤ t ≤
使用FFmpeg打水印,加速减速播放以及4宫格播放视频
1、FFmpeg为视频添加水印 .\ffmpeg.exe -i .\tou6.mp4 -vf "drawtext=fontfile=SimHei.ttf: text='Head camera of baxter(Long distance)':x=10:y=10:fontsize=50:fontcolor=yellow:shadowy=2" tou6_2.mp4 SimHei.ttf:是wi
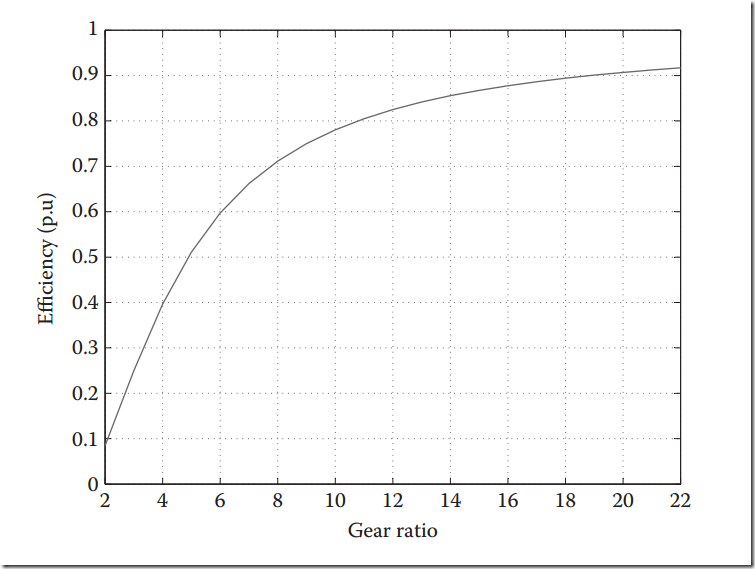
实用机器人设计(五)-机器人电机功率选择和减速箱传动比设计
6.1 减速箱传送比 电机小转矩,高转速 6.3 电机的参数 6.4 线性等效摩擦系数B 6.5减速箱传送比的初步研究 求出两个传送比,但用较大的传送比 代码: 图像: 传送比,速度的关系。 转载于:https://www.cnblogs.com/mohuishou-love/p/10228775.html
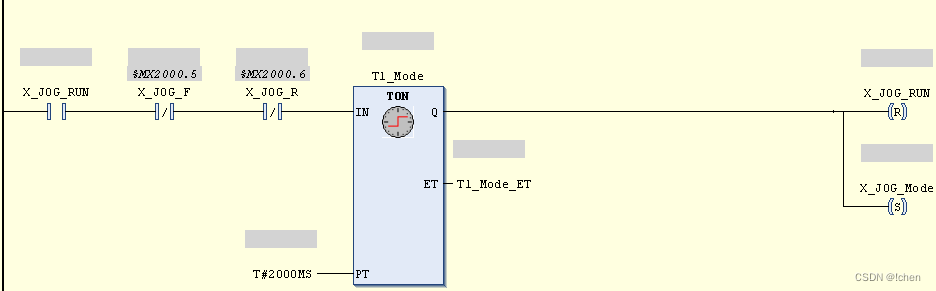
施耐德Lexium23A运行JOG停止时无减速过程解决方案
在现场调试时发现,如果Lexium23A工作在Pr模式下,无论是通过CANopen总线控制软件DI接通(相应DI点设置为JOG运行)还是实际的物理点接通,在JOG停止时,伺服电机会瞬间停止,造成机械冲击,并且在调整P1-34,P1-35,P1-36加减速时间与P1-08位置指令滤波后仍无改善,但如果使伺服进入P4-05参数,按下ENT键之后,显示面板显示-JOG-时,此时通过CANopen总线控制

cocos2d-x 动画加速与减速
转自:http://novacreo.com/%E7%A8%8B%E5%BA%8F%E7%BB%84/cocos2d-x%E5%8A%A8%E7%94%BB%E5%8A%A0%E9%80%9F%E4%B8%8E%E5%87%8F%E9%80%9F/ 动画是游戏的必然要素之一,在整个游戏过程中,又有着加速、减速动画的需求。以塔防为例子,布塔的时候希望能够将游戏减速,布好塔后,则希望能将游戏加速
立创梁山派开发板-21年电赛F题-送药小车-直流减速电机PID速度环与位置环调试
直流减速电机PID速度环与位置环调试 什么是PID? PID(Proportional-Integral-Derivative)控制是一种广泛应用于工业和嵌入式系统的控制算法。它通过比较期望的设定点和实际的过程变量之间的差异(称为误差)来调整控制系统的输出。PID控制器结合了比例(P)、积分(I)和微分(D)三种控制方式,以实现对系统的精确控制。 PID控制的三个主要组成部分: 比例控制

AI move to 移动加速和减速问题
AI move to 移动加速和减速问题 当在使用AI move to ,在开始移动和停止移动AI会直接移动和停住,造成不好的效果。 这是可以在角色移动组件中设置导航移动 设置 使用路径加速 为true,设置后路劲跟随将根据加速度值控制角色运动,否则直接设置速度设置使用路径固定制动距离 为true设置后固定路径制动距离将用于路径跟随减速设置 固定路径制动距离这个距离用来为刹车距离重载 需要连续
步进电机运动八大加减速算法
引导一种模块化(Module)设计思想,将传统步进电机的控制器(controller)、驱动器(Driver)、运动算法(Arithmetic)三合一。 对比国内外步进电机驱动原理和已有工作,结合各种硬件特性,改进或实现了可实际移植并用于步进电机控制八大算法。本产品为步进电机实际控制算法实现源代码,包括市面上常用的梯形加减速算法、SPTA算法、PWM专用通道算法、特征拟合算法、任意形状

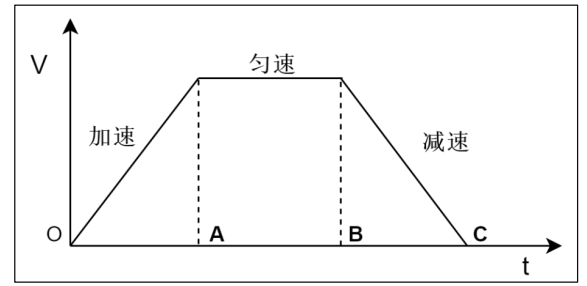
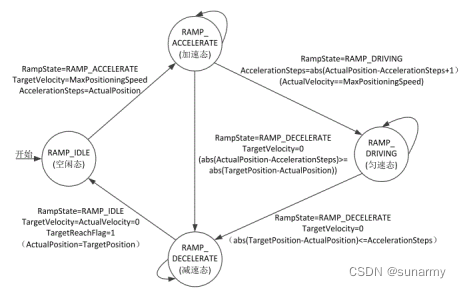
2.1 梯形加减速算法
2.1 梯形加减速算法 简介 本文将详细介绍梯形加减速算法的原理和代码实现。梯形加减速算法是一种常用的运动规划算法,用于实现平滑的加速和减速过程,以达到稳定运动的目的。这种轨迹分为三个部分。梯形加减速规划时,一般只对路径长度L进行规划,不管路径的具体形状,在插补的模块同时根据路径几何规律和加减速规律,计算路径上的插补点。 梯形加减速第一部分,加速度恒定,速度是时间的线性函数,位移是时间的抛物