本文主要是介绍第6节、T型加减速转动【51单片机+L298N步进电机系列教程】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
↑↑↑点击上方【目录】,查看本系列全部文章
摘要:本章介绍步进电机T型加减速的控制方法,分三个小节,本小节主要内容为该控制方法的推导与计算。目前各平台对该控制方法介绍的文章目前较多,但部分关键参数并未给出推导过程,例如误差系数0.676的推导等,本节在现有文章框架下,对推导过程进行了梳理
目录
一. 加速阶段
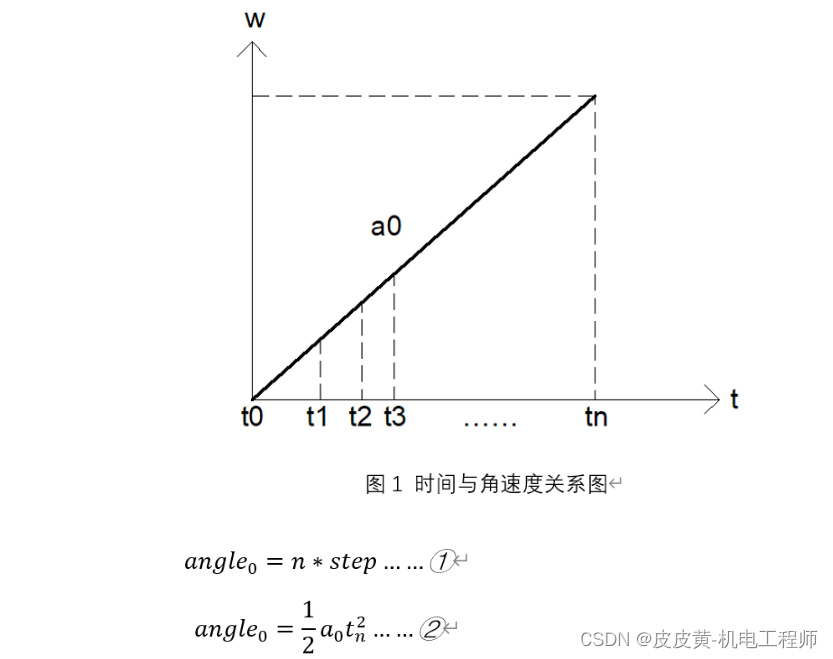
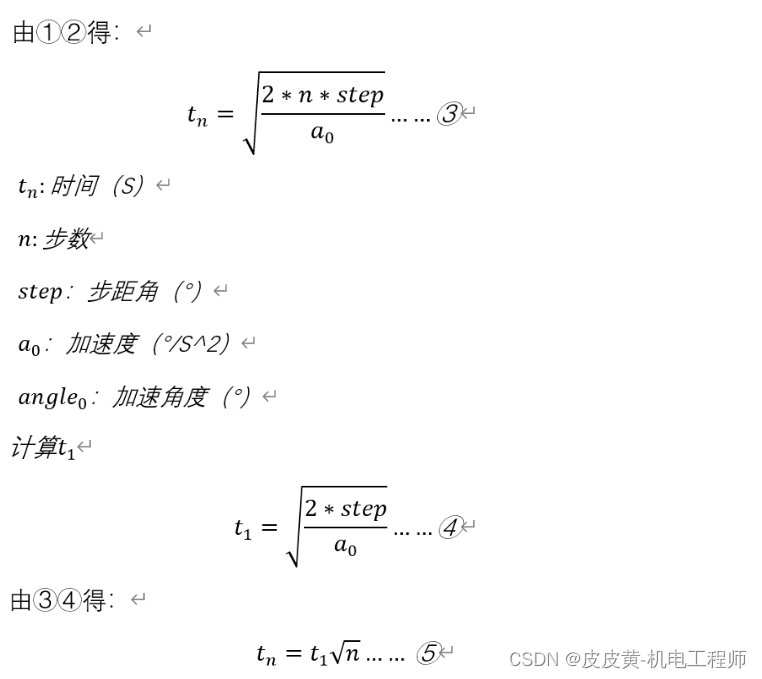
1.1计算时间与步数关系
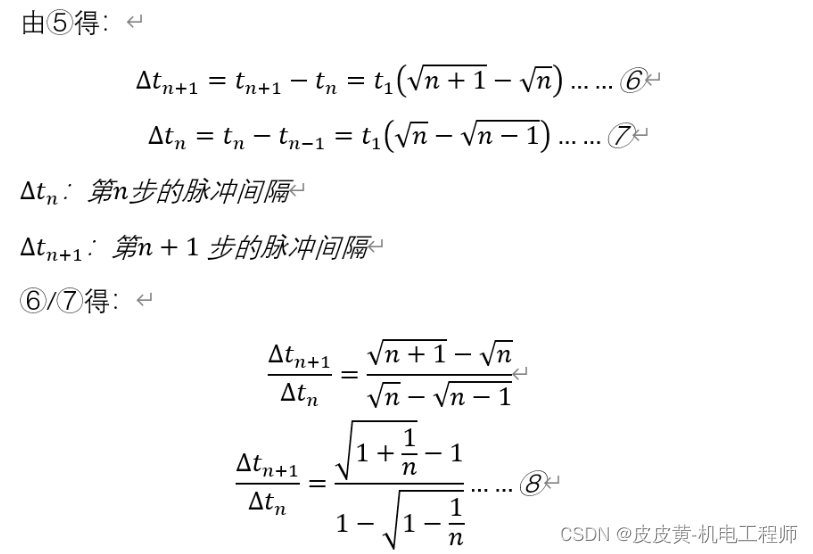
1.2计算时间间隔递推关系
1.3误差分析
1.4计算定时器初值
二. 加速+减速阶段
三. 判断匀速阶段是否存在
四. 总结
一.加速阶段
1.1计算时间与步数关系
1.2计算时间间隔递推关系

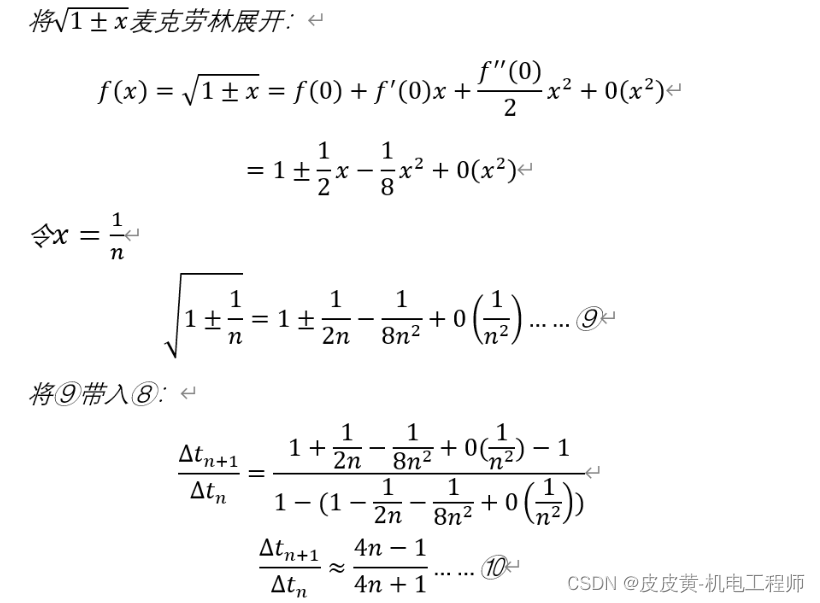
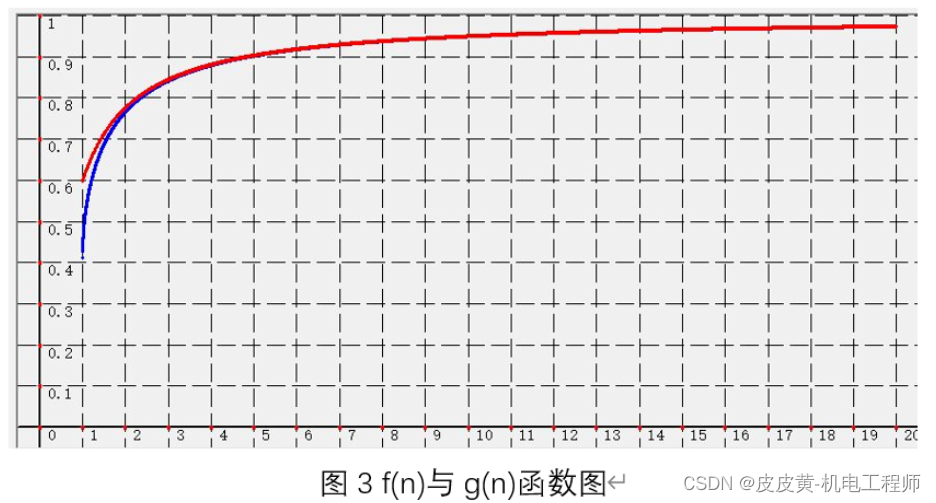
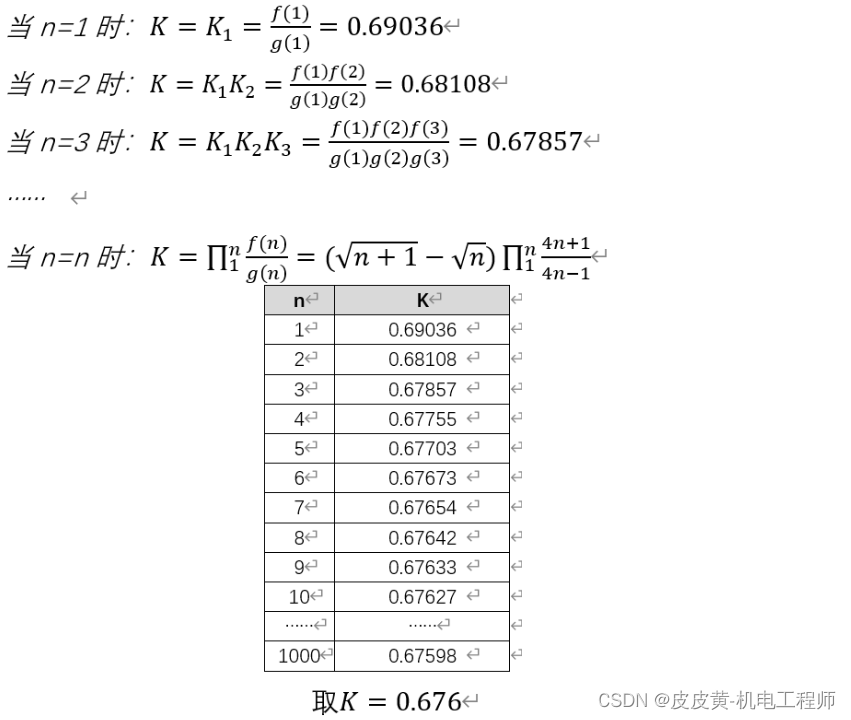
1.3误差分析
函数图像如图3所示,主要误差来源于前面项

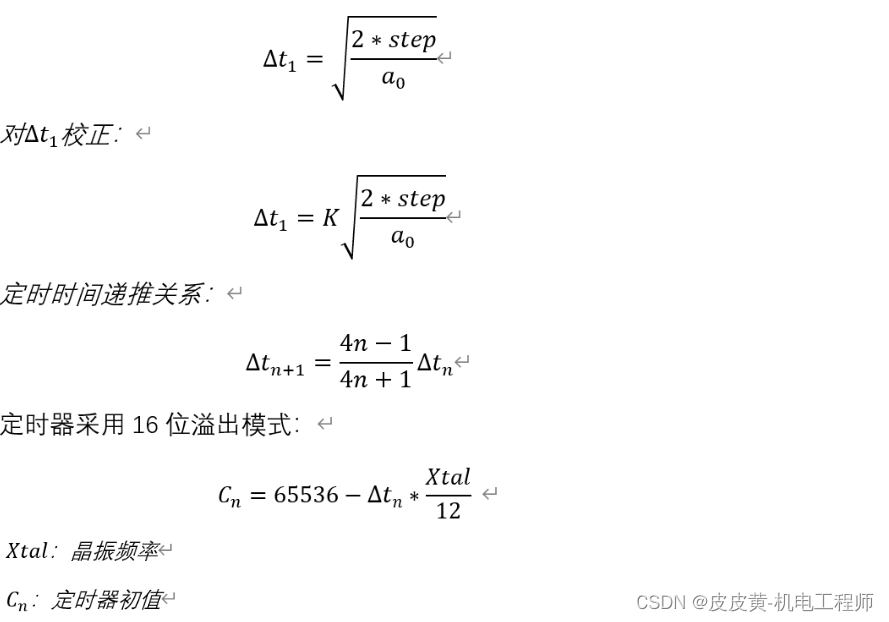
1.4计算定时器初值
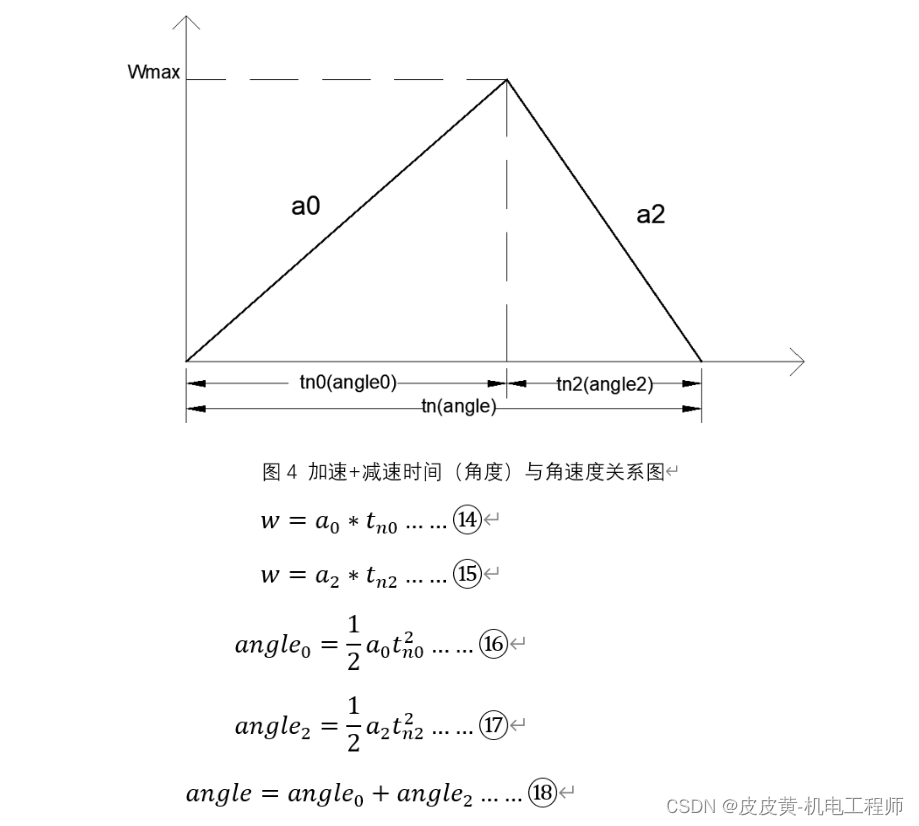
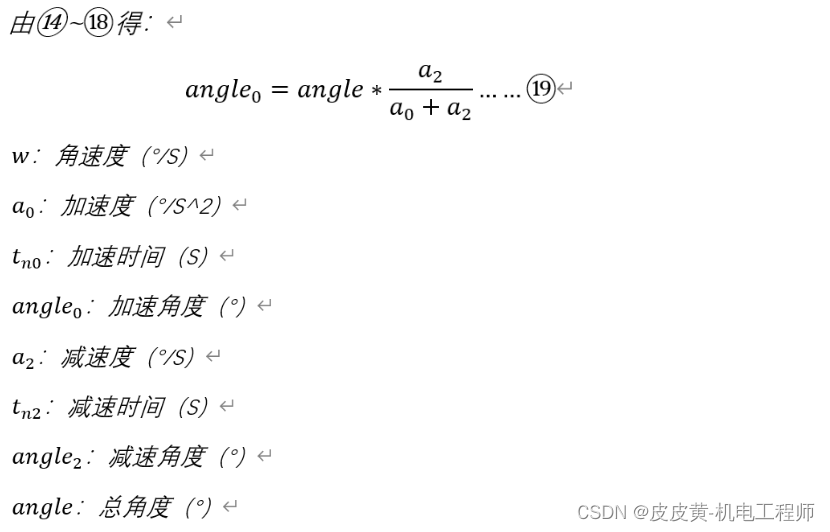
二. 加速+减速阶段
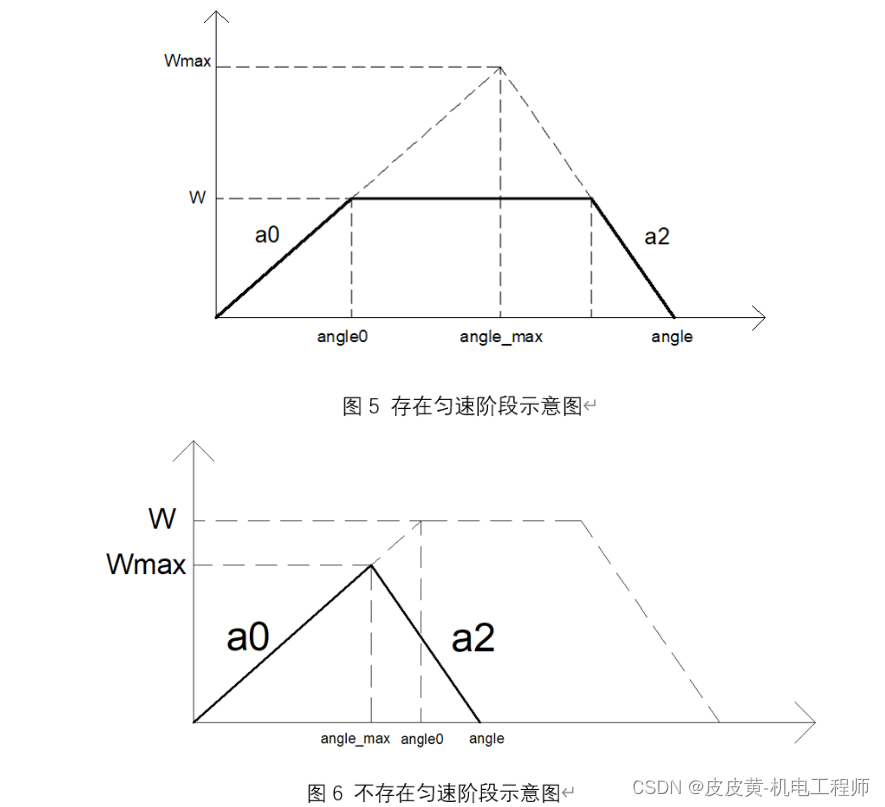
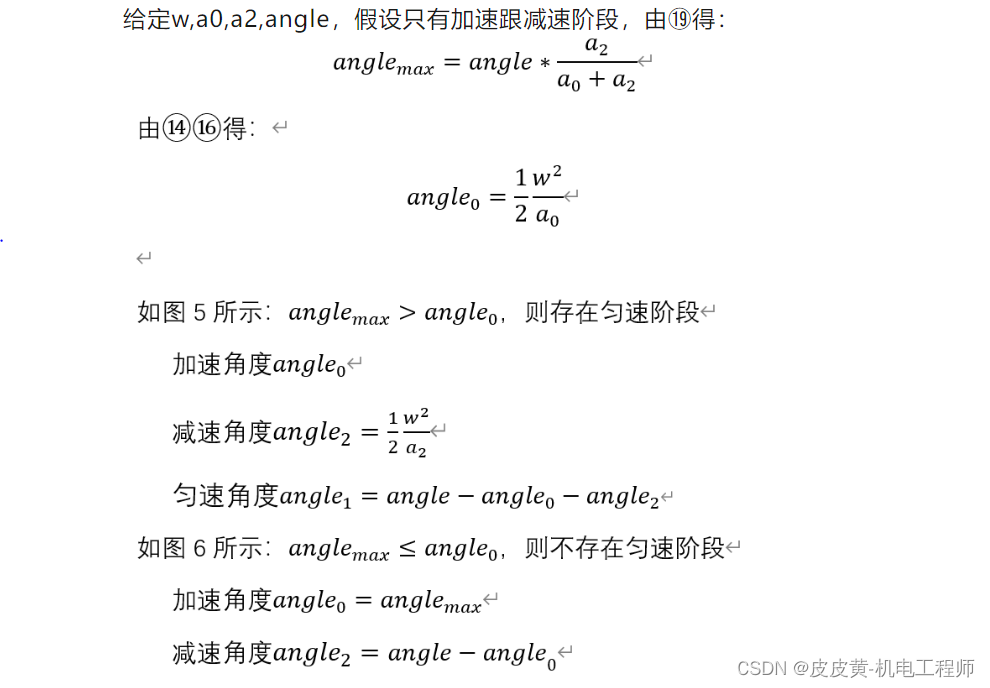
三.判断匀速阶段是否存在
四.总结
上述内容对T型加减速的过程进行了计算,因为大量计算内容涉及到浮点数,显然不适用与单片机的控制,下一节将对计算过程进行简化,使其适用于单片机计算
这篇关于第6节、T型加减速转动【51单片机+L298N步进电机系列教程】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








