步进专题

聊聊2相步进电机的细分算法与细分步进角
2 相步进电机是一种常见的电机类型,广泛应用于各种自动化设备中。细分算法是提高步进电机精度和运行平稳性的重要手段。 一、细分算法的原理 细分算法的基本思想是将一个整步分成若干个微步,通过控制电机绕组中的电流大小和方向,使电机的转子在每个微步中转动一个微小的角度。这样可以大大提高电机的分辨率和精度,同时也可以降低电机的振动和噪声。 细分算法通常采用正弦波电流控制方式,即通过控制电机绕组中的电流

使用STM32F103的步进电机是运作的 || 步进电机驱动程序编写
目录 步进电机的工作原理与运作机制 一、步进电机的基本原理 二、步进电机的类型 三、步进电机的运作机制 1. 驱动方式 2. 控制模式 3. 步进序列 四、步进电机的应用 五、总结 六、参考资料 步进电机的工作原理与运作机制 步进电机是一种将电脉冲转化为机械运动的驱动装置。它以固定的角度步进,从而实现精确的定位控制。本文将详细介绍步进电机的工作原理、

4-1-5 步进电机原理2(电机专项教程)
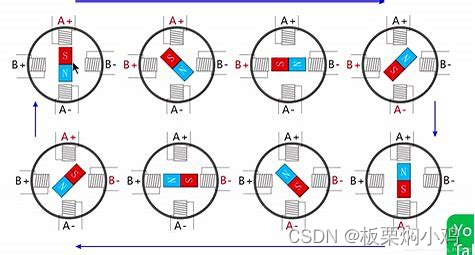
4-1-5 步进电机原理2(电机专项教程) 4-1-5 步进电机原理2永磁式步进电机反应式步进电机混合式步进电机混合式步进电机基本原理 4-1-5 步进电机原理2 新的步进电机分类 永磁式步进电机 目前学习的转子都是永磁铁 反应式步进电机 软磁材料易受到周围磁场的影响,又很难被磁化,当周围有磁场,会容易受到影响,周围磁场被去掉就像什么没发生,不会保留

4-1-6 arduino控制42步进电机(电机专项教程)
4-1-6 arduino控制42步进电机(电机专项教程) 4-1-6 arduino控制42步进电机NEMA双极性步进电机A4988如何使用arduino连接A4988驱动模块Arduino控制Nema-17步进电机(简化版)A4988 Vref电压调节(具体看视频) 4-1-6 arduino控制42步进电机 之前学习了步进电机的基本工作原理,此学习如何使用arduin

基于STM32实现TMC5160步进电机简单转动
TMC5160三种模式 TMC5160有三种模式 模式一:SD_MODE=0,SPI_MODE=1。在该模式下,用户通过SPI接口来设置TMC5160的寄存器配置参数。再设置工作模式:速度模式和位置模式 模式二:SD_MODE=1,SPI_MODE=1。在该模式下,用户通过SPI接口来设TMC5160的寄存器。TMC5160的功能和DRV8825类似,外界通过脉冲和方向引脚来控制步进电机运动 模
工程设计问题-步进锥滑轮问题
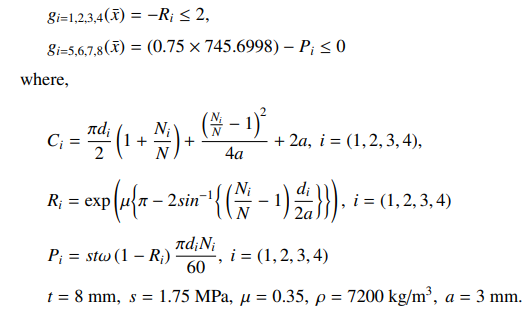
该问题的主要目标是用5个变量使4阶锥皮带轮的重量最小,其中4个变量是皮带轮每个台阶的直径,最后一个变量是滑轮的宽度。该问题包含11个非线性约束,以保证传动功率必须为0.75马力。 Abhishek Kumar, Guohua Wu, Mostafa Z. Ali, Rammohan Mallipeddi, Ponnuthurai Nagaratnam Suganthan, Swag
14 学习PID--步进电机梯形加减速实现原理
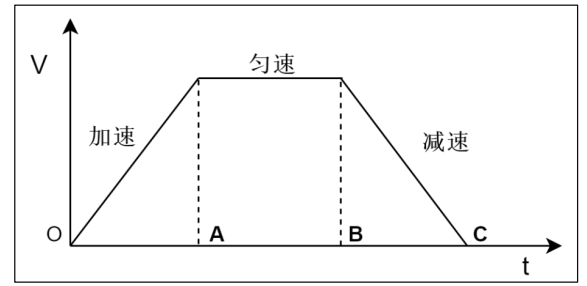
步进电机加减速使用的场景有那些呢?为什么要使用加减速呢? 硬件驱动细分器与软件的细分参数或定时器分频参数设置不当时启动电机时,会遇见步进电机有啸叫声但是不会转动,这是因为软件产生脉冲的频率大于步进电机的启动频率,步进电机有一个很重要的技术参数:空载启动频率,也就是在没有负载的情况下能够正常启动的最大脉冲频率,如果脉冲频率大于该值,步进电机则不能够正常启动,发生丢步或者堵转的情况。或者也可
12.步进电机驱动实验
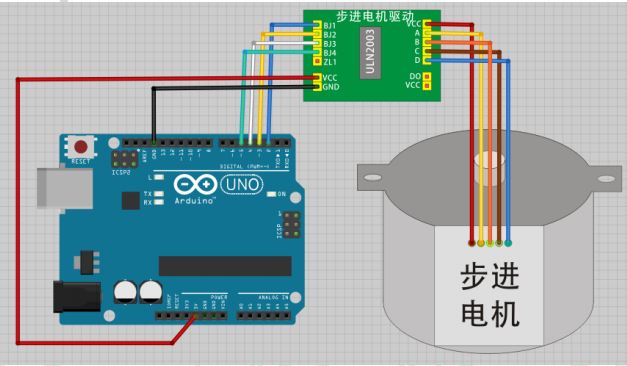
实验现象:步进电机旋转。 理论学习: 28BYJ-48步进电机空载耗电在50mA以下,带64倍减速器,输出力矩比较大,可以驱动重负载,极适合开发板使用。注意:带有64倍减速器的步进电机,与不带减速器的步进电机相比,转速显得较慢,为方便观察,可在输出轴处粘上一片小纸板。其中红色线为VCC,其余4个为4个相位。 使用ULN2003达林顿驱动芯片驱动步进电机,板载4个LED,可以指示相位状
利用树莓派控制步进电机——C语言
电路连接方式请看另一篇博文:【利用树莓派控制步进电机——python语言】 /******************************************************* File name: stepMotor.c* Author: Jason Dai* Date: 2015/01/26************************
利用树莓派控制步进电机——Python语言
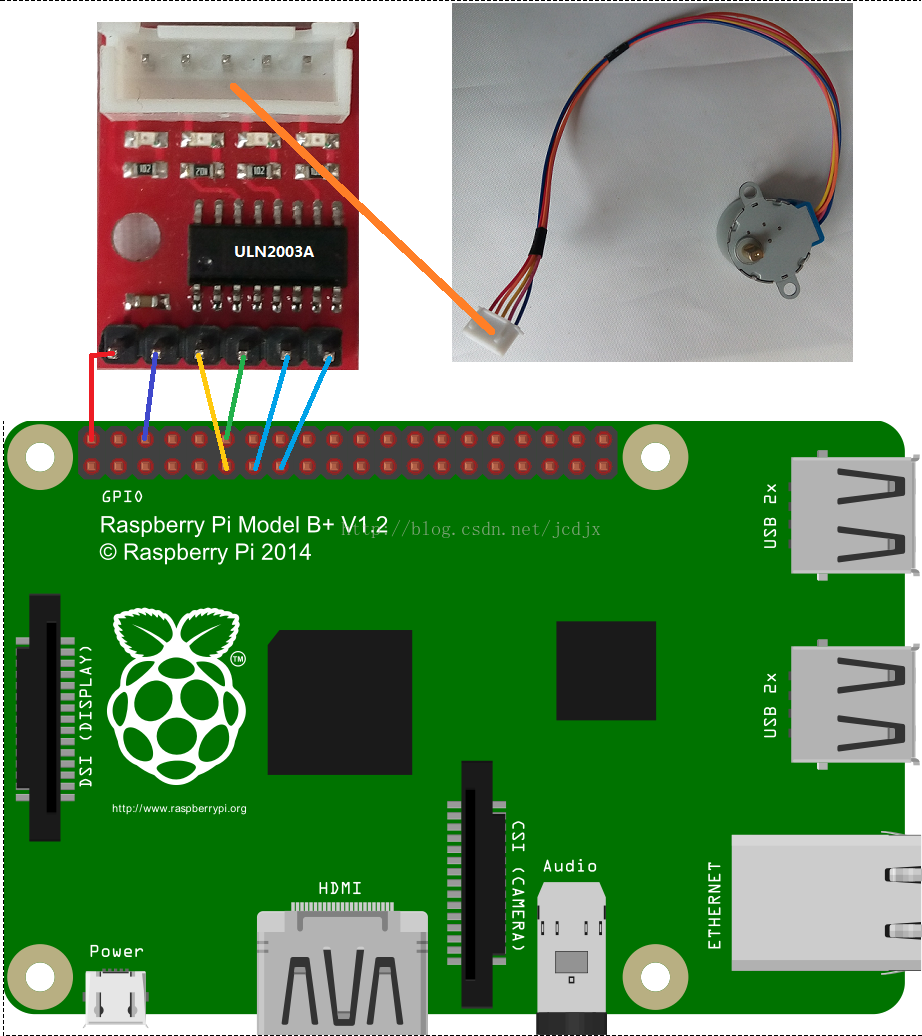
步进电机的优点在于它能够被精确定位,正向或反向一次性转动“一步”,并且也能够连续转动。本次实验,我们选用的舵机驱动芯片是ULN2003A,ULN2003 是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成。为了方便起见,我们用了ULN2003A模块,电路连接方式如下图: #!/usr/bin/env python######################
TB6600结合树莓派的pmw针脚实现对步进电机的速度设定,例如1s 2圈,使用pi4j2编写
一.理论介绍及代码 TB6600是一个流行的步进电机驱动器,它通常使用脉冲(PUL)输入来控制步进电机的步进,方向(DIR)输入来控制旋转方向。要通过树莓派控制TB6600以实现特定的速度(例如1秒钟2圈),你需要生成适当频率的PWM脉冲。但请注意,TB6600本身不是通过PWM调节速度的,而是通过脉冲频率来控制,每个脉冲代表一个步进。 假设你的步进电机是1.8度每步(即每转200步)。为了在

树莓派控制五线四相步进电机
同样是大二时候的坑......就不明白了当初为什么不把代码也给贴上去,现在就贴出代码。 #include<stdio.h>#include<stdlib.h>#include<wiringPi.h> //提供GPIO控制函数#include<unistd.h> //提供sleep()函数void DelayMs(int n){usleep(n*1000);}//使树莓派停止voi

基于51单片机步进电机控制—9个等级
基于51单片机步进电机控制 (仿真+程序+设计报告) 功能介绍 具体功能: 1.使用L298驱动步进电机转动,可分为9个速度等级(1级最快,9级最慢); 2.使用74HC595驱动数码管显示当前速度等级; 3.两个按键可以控制转速和正/方向; 演示视频: 基于51单片机步进电机控制—9个等级 添加图片注释,不超过 140 字(可选)
STM32用IO口控制步进电机的简单程序
练习IO口库函数操作。 [cpp] view plain copy print ? //相序 uint16_t phasecw[4] ={0x2000,0x0001,0x0004,0x0008};// D-C-B-A uint16_t phaseccw[4]={0x0008,0x0004,0x0001,0x2000};// A-B-C-D [
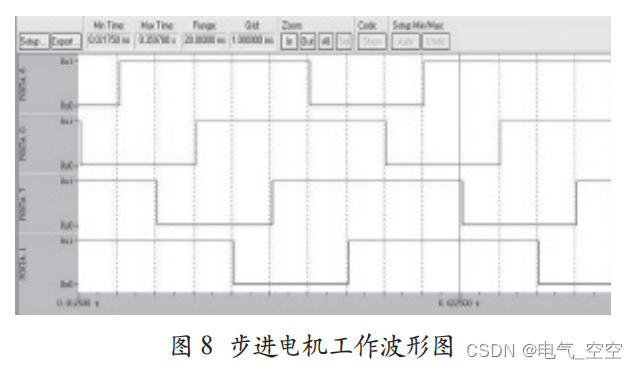
步进电机双闭环细分控制(matlab仿真)内含课设等参考文件
1.1 步进电机工作原理 步进电机是一种用电脉冲进行控制,将电脉冲信号转换成相位移的电机,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成正比,每一个脉冲信号可使步进电机旋转一个固定的角度。脉冲的数量决定了旋转的总角度,脉冲的频率决定了电机运转的速度。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的
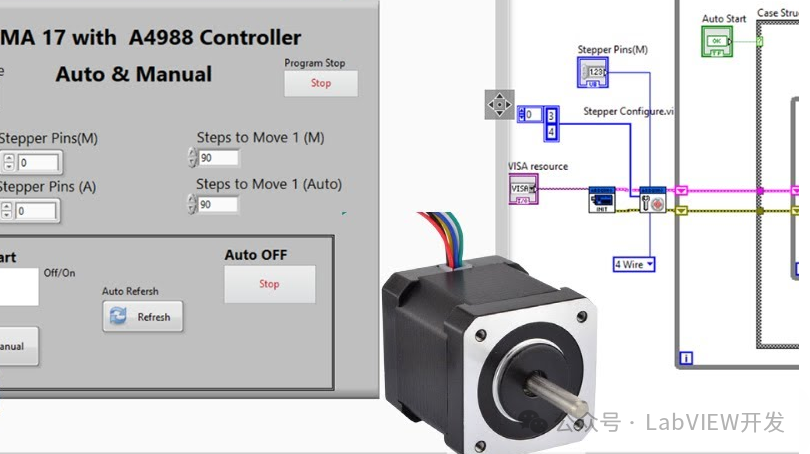
LabVIEW步进电机的串口控制方法与实现
本文介绍了在LabVIEW环境中通过串口控制步进电机的方法,涵盖了基本的串口通信原理、硬件连接步骤、LabVIEW编程实现以及注意事项。通过这些方法,用户可以实现对步进电机的精确控制,适用于各种自动化和运动控制应用场景。 步进电机与串口通信简介 步进电机是一种将电脉冲信号转换成角位移的执行机构,广泛应用于自动化控制领域。通过串口(Serial Port)进行控制是一种常见的方法,串口通信是一种
基于单片机的步进电机控制系统研究
摘 要 : 近年来 , 步进电机凭借其定位精度高 、 使用方便 、 性价比高 、 容易控制等优点 , 在各领域受到广泛应用 。 文中利用C52 单片机设计了一种步进电机控制系统 , 介绍了其总体方案 、 主控制模块 、 驱动电路 、 键盘 、 晶振电路模块等 , 并使用Protues绘制仿真图 , 与编程软件进行联合调试仿真 。 仿真结果表明 , 所设计的步进电机控制系统正确有效 。
51控制步进电机的驱动
/*********************************************************************** /*********************************************************************** 程序功能: 本程序为用单片机制作的占空比均匀间隔可调PWM发生器。占空比可调间隔 为0.1。即可取得占空比
手把手从0到1教你做STM32+FreeRTOS智能家居--第11篇之步进电机
一、硬件设计 步进电机介绍 本项目用到的是常见的也是控制起来最简单的步进电机:五线四项的步进电机28BYJ-48。 单片机IO口输出电流太小无法直接驱动电机运行,在这里我们需要另外加一个电机驱动板。可以选择ULN2003电机驱动板。 步进电机的控制原理 给步进电机不同的项轮流进行通电,在电磁感应作用下,每次产生一个很小的角位移,连贯起来就能够带动电机的转动,进行负载的驱动

步进电机与伺服电机的区别
什么是电机? 电机是一种将电能转换为机械能的装置,通常由定子、转子和电磁场组成。当电流通过电机的绕组时,产生的磁场会与电机中的磁场相互作用,从而使电机产生旋转运动。电机广泛应用于各种机械设备和工业生产中,是现代社会不可或缺的重要设备之一。常见的电机种类包括直流电机、交流电机、步进电机、伺服电机等。 1,步进电机与伺服电机的外观区别(步进只有一个输出线,伺服有二个输出线
树莓派控制步进电机(下):软件编程
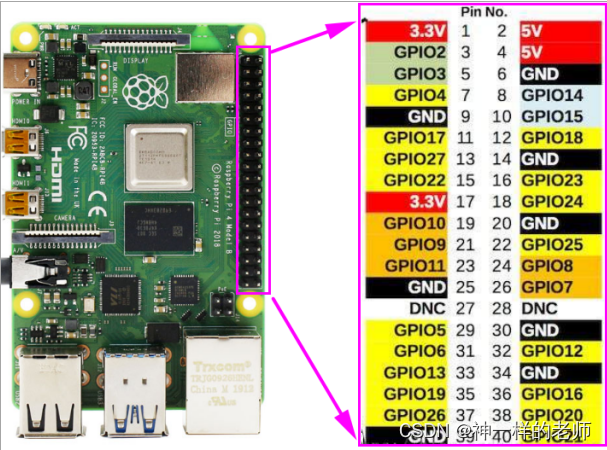
目录 说明 软件编程 树莓派的RPI编程 基本测试程序 参考文献 说明 在上一篇博文中我们介绍了树莓派控制步进电机所需要的硬件连接,本篇博文主要介绍软件编程。这里我们使用的是树莓派4B开发板,步进电机为6线两相步进电机,驱动器采用的是DM542。 软件编程 树莓派的RPI编程 树莓派中可以使用RPi.GPIO库对GPIO进行访问。 有两种方法可以在 RPi.GPI
PCI-8134A.dll 入门级4轴伺服和步进运动控制卡与PCI-DASK.DLL
PCI-8134A 入门级4轴伺服和步进运动控制卡 8134A.dll(ADLINK—凌华科技) PCI-DASK.DLL //DASK Data Types typedef unsigned char U8; typedef short I16; typedef unsigned short U16; typedef long I32; ty
一种直接采用计算机串行口控制步进电机的新方法
步进电机在数控机床、医疗器械、仪器仪表等自动或半自动设备中得到了广泛应用。用计算机控制步进电机的通常作法是采用步进控制卡,系统构成如图1所示。其中Pulse、Dir分别为控制电机的转动步数和旋转方向的信号;CWL(Clock Wise Limit)、CCWL(Counter Clock Wise Limit)分别为电机顺、逆时针旋转的限位信号;ORG为定位信号。 这种方法不仅成本较

【机械自动化】步进电机和“伺服电机”
1、步进电机 引用百度知道解释步进电机和伺服电机的区别:https://zhidao.baidu.com/question/493118373016625172.html。 很多文章都有解释,而且其实两者的区别很明显,但是由于在淘宝上搜索伺服电机的时候,有很多标着伺服电机系统的链接卖的其实是闭环步进电机系统,对我的判断造成了困扰,例如下面这个产品(没有说产品不好的意思,只是概念上有区别):
MOTOR-STEPP(步进电机)
工具 1.Proteus 8 仿真器 2.keil 5 编辑器 原理图 讲解 简介 步进电机是一种将电脉冲转换为角位移的开环控制元步进电机。当步进驱动器接收到脉冲信号时,它将根据设定方向(即步进角)驱动步进电机旋转一定角度。 可以通过控制脉冲量来控制角位移量,从而达到精确定位的目的,同时还可以通过控制脉冲频率来控制电机的转速和加速度,从而达到速度控制的目的。 分类 永磁体(
串口通信如何控制步进电机转动?
在自动化控制系统中,步进电机的控制是一项重要的技术任务。通过串口通信控制步进电机转动,可以实现远程控制和自动化操作,提高生产效率和降低人工成本。本文将详细介绍串口通信控制步进电机转动的关键步骤和技术要点。 首先,我们需要了解串口通信的基本原理和配置方法。串口通信是一种常用的数据通信方式,通过串行传输数据实现设备之间的信息交互。在C51单片机中,串口通信的相关寄存器需要进行合理配置,包括波特率、数