本文主要是介绍步进电机双闭环细分控制(matlab仿真)内含课设等参考文件,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.1 步进电机工作原理
步进电机是一种用电脉冲进行控制,将电脉冲信号转换成相位移的电机,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成正比,每一个脉冲信号可使步进电机旋转一个固定的角度。脉冲的数量决定了旋转的总角度,脉冲的频率决定了电机运转的速度。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
1.2 步进电机基本分类
步进电机分三种:永磁式(PM)反应式(VR)和混合式(HB)1)反应式步进电机:反应式步进电机的转子是由软磁材料制成的,转子中没有绕组它的结构简单,成本距角可以做得很小,但动态性能较差。反应式步进电机有单段式和多段式两种类型。
2)永磁式步进电机:永磁式步进电机的转子是用永磁材料制成的,转子本身就是一个磁源。转子的极数和定子的极数相同,所以一般步进角比较大,它输出转矩大,动态性能好,消耗功率小(相比反应式),但启动运行频率较低,还需要正负脉冲供电。3)混合式步进电机:混合式步进电机综合了反应式和永磁式两者的优点。混合式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低 。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪声低、低频振动小。这种电动机最初是作为一种低速驱动用的交流同步机设计的,后来发现如果各相绕组通以脉冲电流,这种电动机也能做步进增量运动。由于能够开环运行以及控制系统比较简单,因此这种电机在工业领域中得到广泛应用。
2.1 模型简介
本仿真模型基于MATLAB/Simulink(版本MATLAB 2015Rb)软件。建议采用matlab2015 Rb及以上版本打开。
2.2 仿真算法
1)采用位置环、电流环双闭环控制算法;
2)位置环采用PID(比例-积分-微分)控制;
3)电流环采用滞环控制;
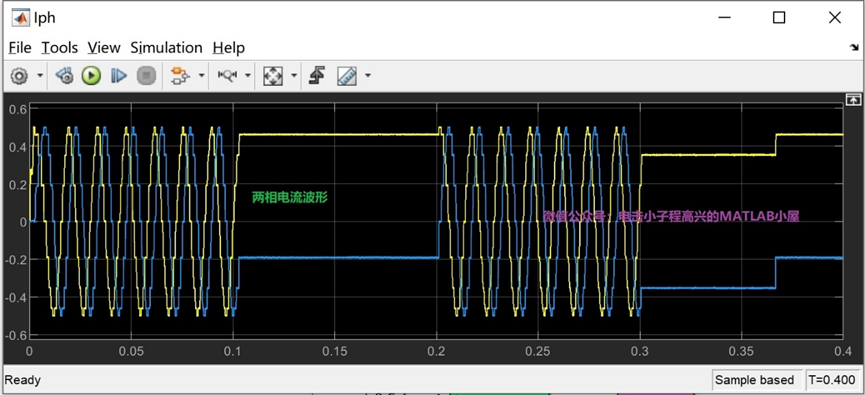
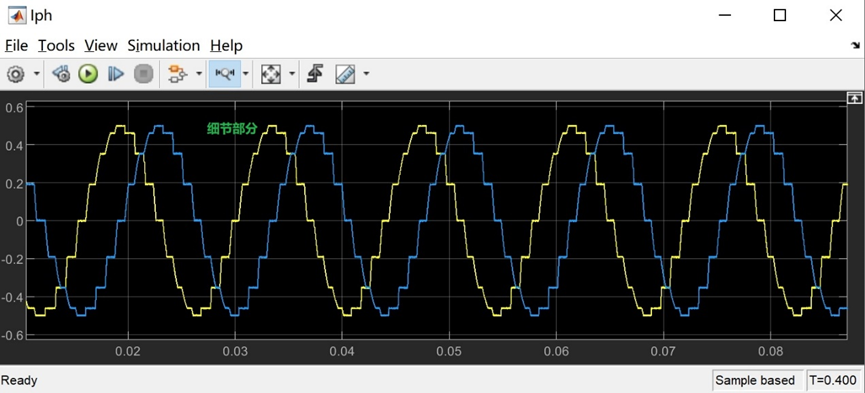
4)对相电流采用细分控制(等步进角均匀细分),默认4细分,可以进行N细分扩展。
5)步进电机基于数学模型搭建,提供详细建模过程;
6)仿真模型包含DC直流源、逆变器、步进电机(两相混合)、负载、控制算法、波形显示等模块;
7)各个模块功能分类明确,理解容易。
2.3 仿真结果:
【01】输出位置波形

【02】输出电流波形
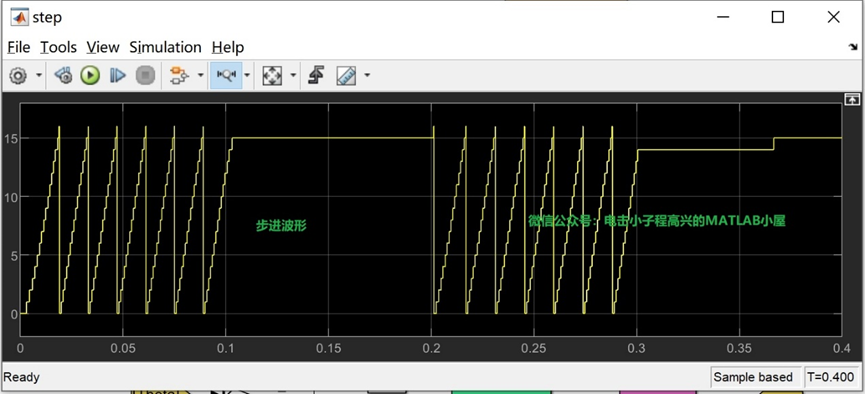
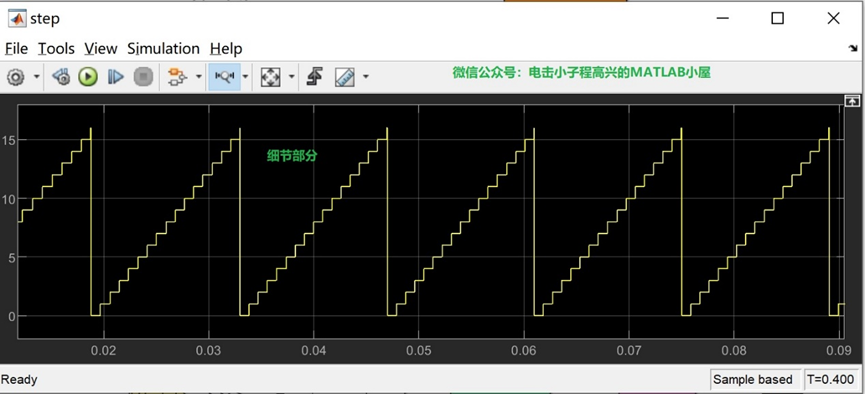
【03】步进波形
【04】输出转速波形

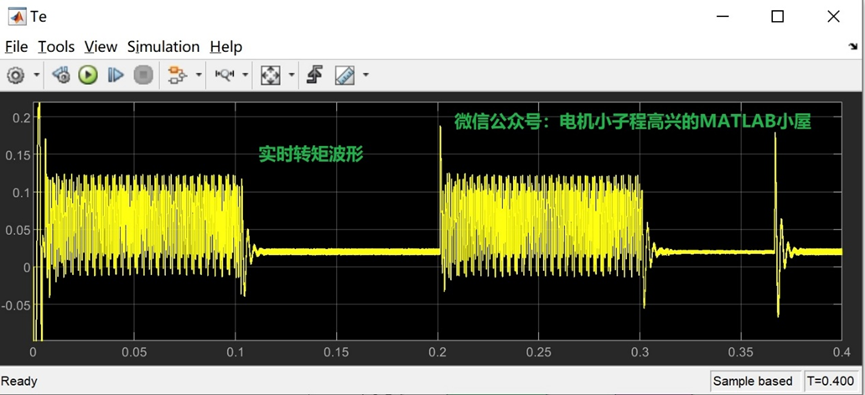
【05】输出转矩波形
【06】驱动信号波形

2.4 配套说明书:
2.5 参考文献:
这篇关于步进电机双闭环细分控制(matlab仿真)内含课设等参考文件的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




