l298n专题

使用树莓派和 L298N 来 DIY 小车底盘
树莓派小车可以作为 STEM(科学、技术、工程、数学)教育的工具,在实际操作中帮助学生理解和学习电子技术、编程和机器人原理。可以培养学生的动手能力、解决问题的能力和创新思维。 随着近年 AI 技术的高速发展,SLAM、VSLAM 甚至带 AI 功能的智能小车也成了学生们热衷的 “玩具”,价格不菲的成品智能小车,却也阻挡了不少学生的求知热情和脚步。 DIY 一个自己的丐版小车底盘,一来可以省米,
第6节、T型加减速转动【51单片机+L298N步进电机系列教程】
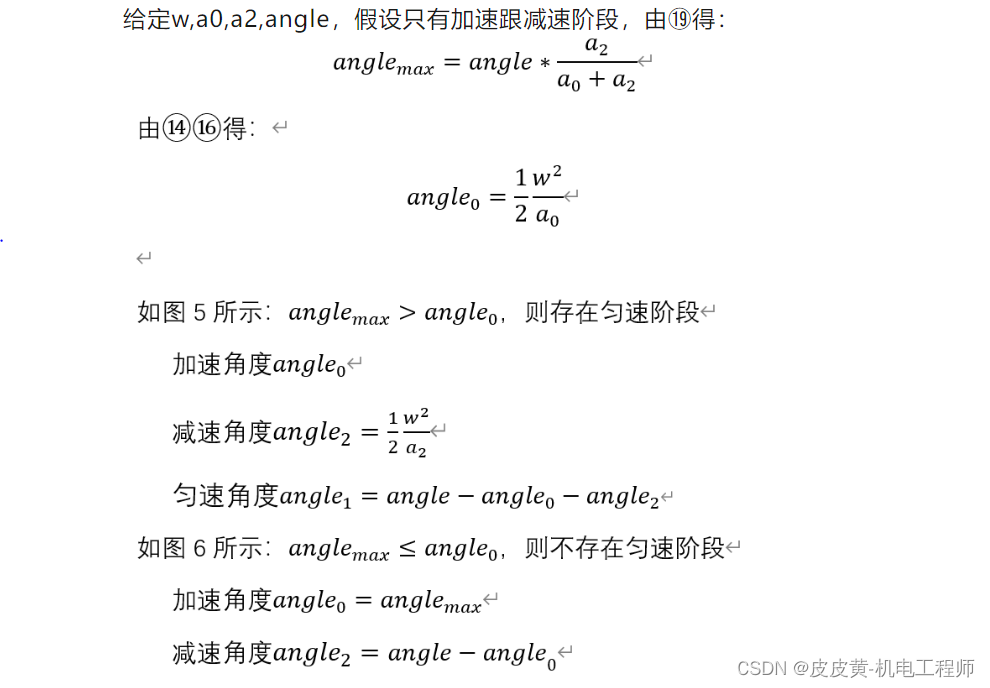
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本章介绍步进电机T型加减速的控制方法,分三个小节,本小节主要内容为该控制方法的推导与计算。目前各平台对该控制方法介绍的文章目前较多,但部分关键参数并未给出推导过程,例如误差系数0.676的推导等,本节在现有文章框架下,对推导过程进行了梳理 目录 一. 加速阶段 1.1计算时间与步数关系 1.2计算时间间隔递推关系 1.3误差分析 1.4
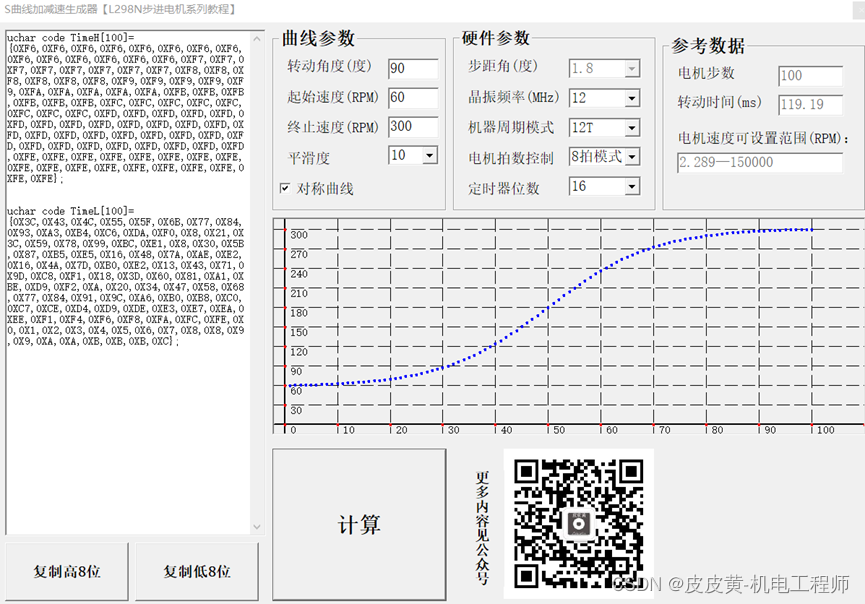
5-3、S曲线生成器【51单片机+L298N步进电机系列教程】
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本节介绍步进电机S曲线生成器的计算以及使用 一.计算原理 根据上一节内容,已经计算了一条任意S曲线的函数。在步进电机S曲线加减速的控制中,需要的S曲线如图1所示,横轴为时间,纵轴为角速度,其中w0为起始角速度,w1为终止角速度 在S曲线加减速控制中,加减速的角度是已知的,根据第五节内容公式③,已经计算了角度与步数的函数关系式为下式 根据第五
第3节、电机定速转动【51单片机+L298N步进电机系列教程】
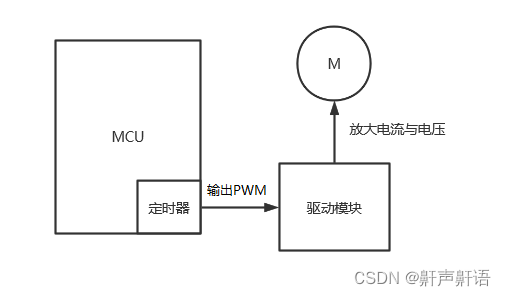
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本节介绍用定时器定时的方式,精准控制脉冲时间,从而控制步进电机速度。 一、计算过程 电机每一步的角速度等于走这一步所花费的时间,走一步角度等于步距角,走一步的时间等于一个脉冲的时间 L298N驱动步进电机有三种模式:单相4拍、双相4拍、8拍,对于二相四线步进电机,4拍步距角为1.8度,8拍等效步距角为1.8/2=0.9度,一个脉冲转动的角度为
第5节、S曲线加减速转动【51单片机+L298N步进电机系列教程】
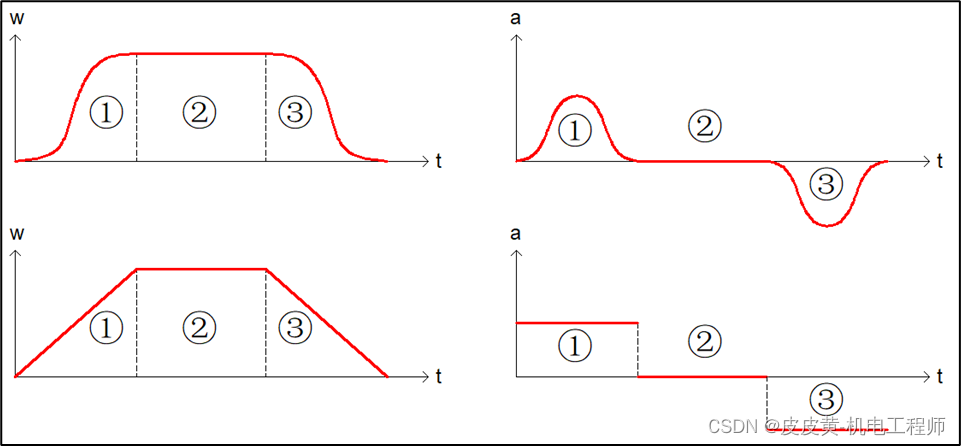
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本节介绍步进电机S曲线相关内容,总共分四个小节讨论步进电机S曲线相关内容 5-1、S曲线加减速简介 根据上节内容,步进电机每一段的速度可以任意设置,但是每一段的速度都会跳变,当这个跳变值比较大的时候,电机会发生明显的抖动,或直接产生丢步,所以在速度变化的过程需要有缓冲阶段,即加减速过程 加减速通常的处理方式有S曲线加减速、匀加减速、指数
第8节、双电机多段直线运动【51单片机+L298N步进电机系列教程】
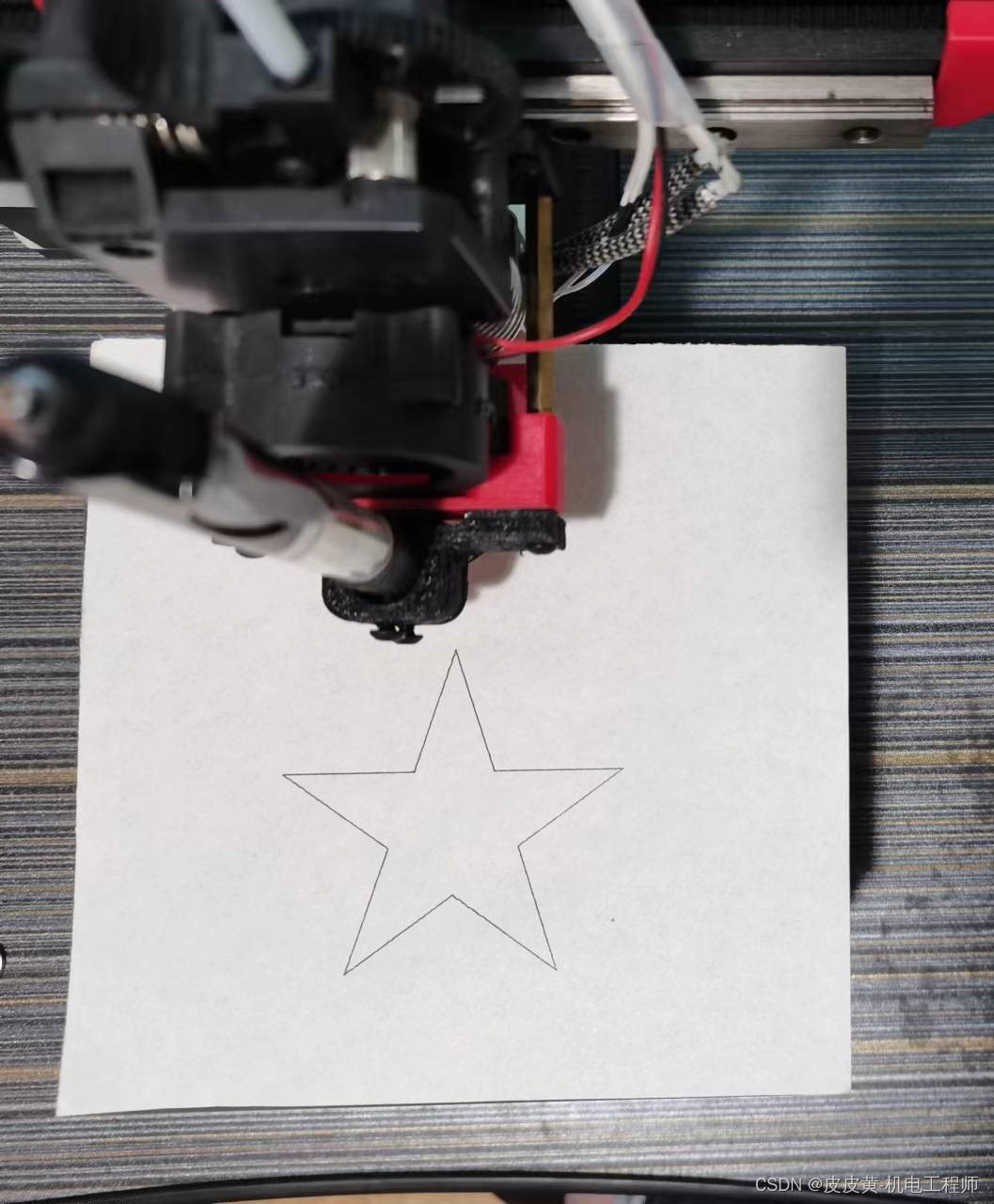
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:前面章节主要介绍了bresenham直线插值运动,本节内容介绍让两个电机完成连续的直线运动,目标是画一个正五角星 一、五角星图介绍 五角星总共10条直线,10个顶点。设定左下角为原点,用CAD画出一个正五角星,量出每一点的坐标值。设定1点为起点,按照1-10的顺序依次画出10条直线,组成完成的五角星 二、程序流程图 在上一节单条直线运动的基
6-2、T型加减速计算简化【51单片机+L298N步进电机系列教程】
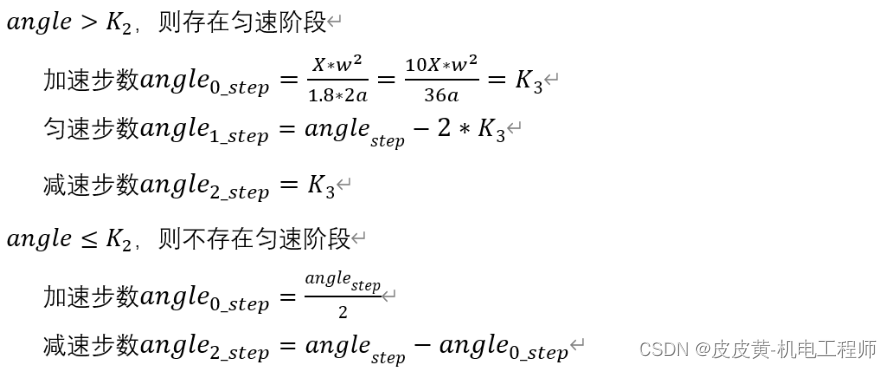
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:本节介绍简化T型加减速计算过程,使其适用于单片机数据处理。简化内容包括浮点数转整型数计算、加减速对称处理、预处理计算 一、浮点数转整型数计算 根据上一节内容已知 常用的晶振大小为11.0592MHz和12MHz,此处统一为12 二、加减速对称处理 为简化计算量,设定加减速过程对称,即a0=a2=a 2.1加速+减速阶段 2.2判断
第7节、双电机直线运动【51单片机+L298N步进电机系列教程】
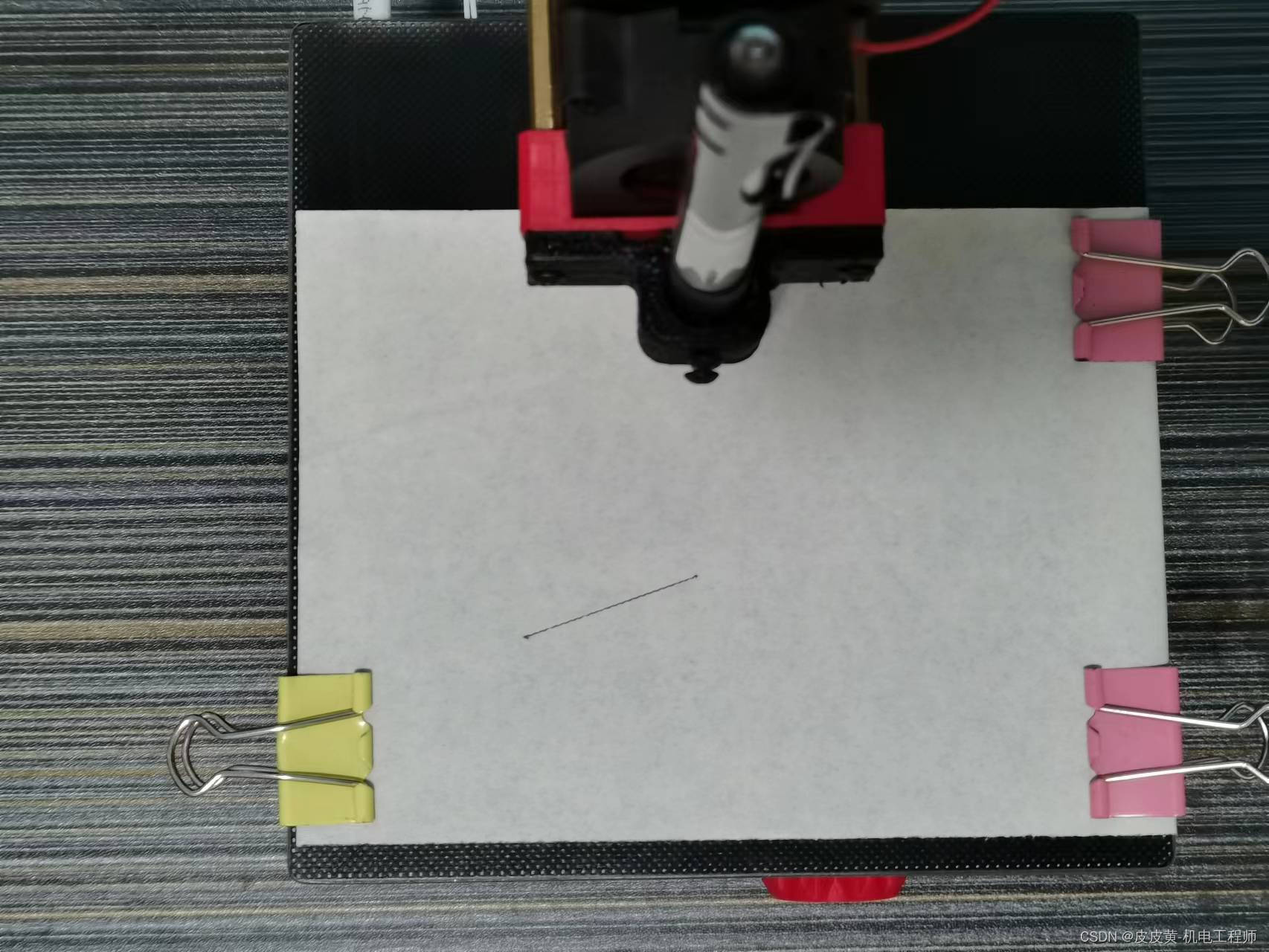
↑↑↑点击上方【目录】,查看本系列全部文章 摘要:前面章节主要介绍单个电机控制,本节内容介绍两个电机完成Bresenham直线运动 一、Bresenham直线算法介绍 Bresenham直线算法由Jack Elton Bresenham于1962年在IBM开发,最初用于计算机显示直线,它确定应该选择的n维光栅的点,以便形成两点之间的直线的近似。因为它仅使用整数加法,减法和位移,非常适合单片机系

基于L298N驱动的麦克纳姆轮的小车(一)组装与驱动电机介绍
L298N驱动小车 材料准备一、L298N使用介绍补充 map()函数的用法 二、小车的组装注意 !!!(重要的事情说三遍:“三遍”)下一篇 代码部分,逻辑分析和上位机控制。 材料准备 1.L298N驱动板2 2.麦克纳姆轮4 3.3000MA电池 4.小车底盘 5.Arduino板子 一、L298N使用介绍 首先,L298N是是小车的核心,难点在于对于各个针脚的使用上。
DRV8313和L298N都是电机驱动,一个是驱动三相FOC无刷直流电机的,一个是驱动有刷电机,使stm32控制无刷电机简单入门知识
DRV8313和L298N都是电机驱动器,但它们之间存在一些关键的区别: DRV83131: 由德州仪器(TI)制造。 具有集成的场效应晶体管(FET)。 最大电压为65V。 峰值电流为3A。 适用于三相电机驱动。 L298N2: 由STMicroelectronics制造。 是一种高压,高电流的双全桥驱动器。 设计用于接受标准的TTL逻辑电平,并驱动诸如继电器,电磁阀,直流电机和步进电机等
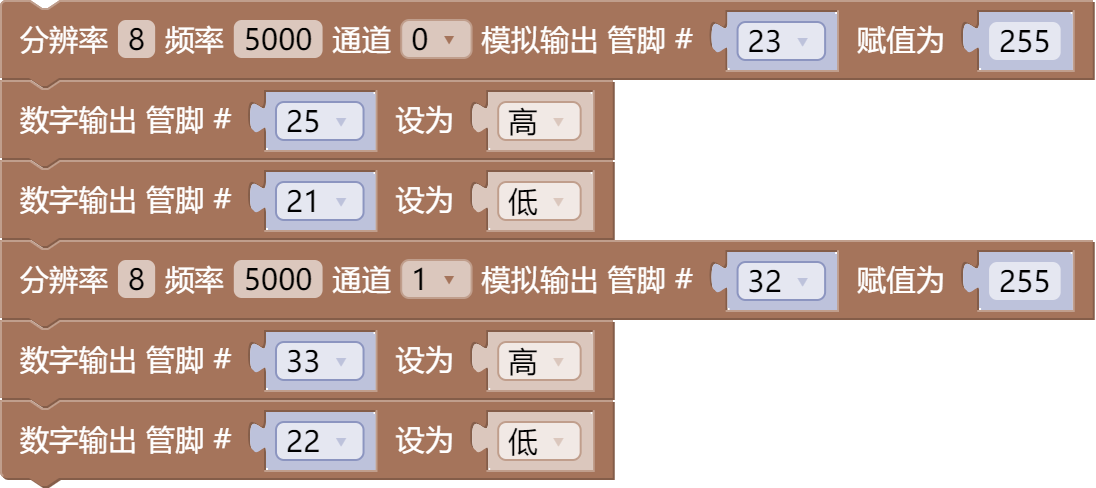
ESP32 控制马达(马达驱动板使用 L298N )
以下内容是建立在你已经知道如何控制L298N的基础上的,如何你还不知道如何使用L298请先了解后再看,更容易理解代码,虽然代码下方有代码的解释但是还是建议你做好准备工作。 代码: 以下代码控制直流电机的速度和方向。该代码在现实世界中没有用,这只是一个简单的示例,以更好地理解如何使用 ESP32 控制直流电机的速度和方向。 // Motor A int motor1Pi

Tcar:智能车之基于L298N电机驱动芯片的驱动模块
2、电机驱动模块 - L298N电机驱动芯片 // env/motor.zip 两个直流电机,控制前轮的用于转向 控制后轮的用于前进后退 编程,让用户方便的控制小车的运动 2.1 电机的驱动 硬件的接法: 电机上需要的瞬间电流可能是安培级的 而

基于单片机的智能循迹避障小车STC89C52红外对管L298N驱动PWM波控制速度
wx供重浩:创享日记 对话框发送:单片机小车 免费获取完整无水印报告等 利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。 第一章 绪论 1.1智能小车的意义和作用 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航