本文主要是介绍第3节、电机定速转动【51单片机+L298N步进电机系列教程】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
↑↑↑点击上方【目录】,查看本系列全部文章
摘要:本节介绍用定时器定时的方式,精准控制脉冲时间,从而控制步进电机速度。
一、计算过程
电机每一步的角速度等于走这一步所花费的时间,走一步角度等于步距角,走一步的时间等于一个脉冲的时间
L298N驱动步进电机有三种模式:单相4拍、双相4拍、8拍,对于二相四线步进电机,4拍步距角为1.8度,8拍等效步距角为1.8/2=0.9度,一个脉冲转动的角度为step/X,带入①式

电机速度通常使用单位为转速RPM(转/分),角速度(°/S)与转速之间的转换关系
至此得到了步进电机一个脉冲的时间t,采用51单片机16位溢出定时器的模式去定时,可以得到:

将④带入⑤可得:

至此得到了转速n与定时初值C的函数关系
二、举例计算
步进电机使用二相四线电机,步距角为1.8°,采用8拍模式(X=2),单片机晶振频率为12000000,设定转速为100RPM,带入⑥可得:

定时器0初值高8位TH0=C/256=0XFA
定时器0初值低8位TL0=C%256=0X24
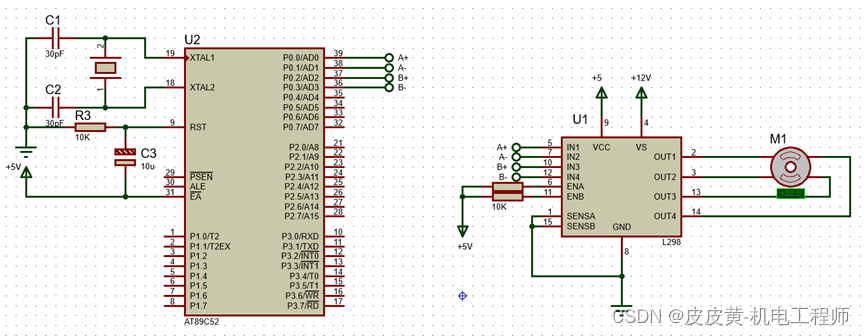
三、proteus仿真及实测
四、总结
此种方式利用定时器精确定时能力,从而控制电机转速,是后续电机加减速运动的理论基础
五、附件
proteus仿真文件百度网盘链接:
链接:https://pan.baidu.com/s/1BiJeJdXYfwZys0exWvslUQ
提取码:3808
Keil工程文件获取链接:
https://item.taobao.com/item.htm?ft=t&id=764272245024
这篇关于第3节、电机定速转动【51单片机+L298N步进电机系列教程】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








