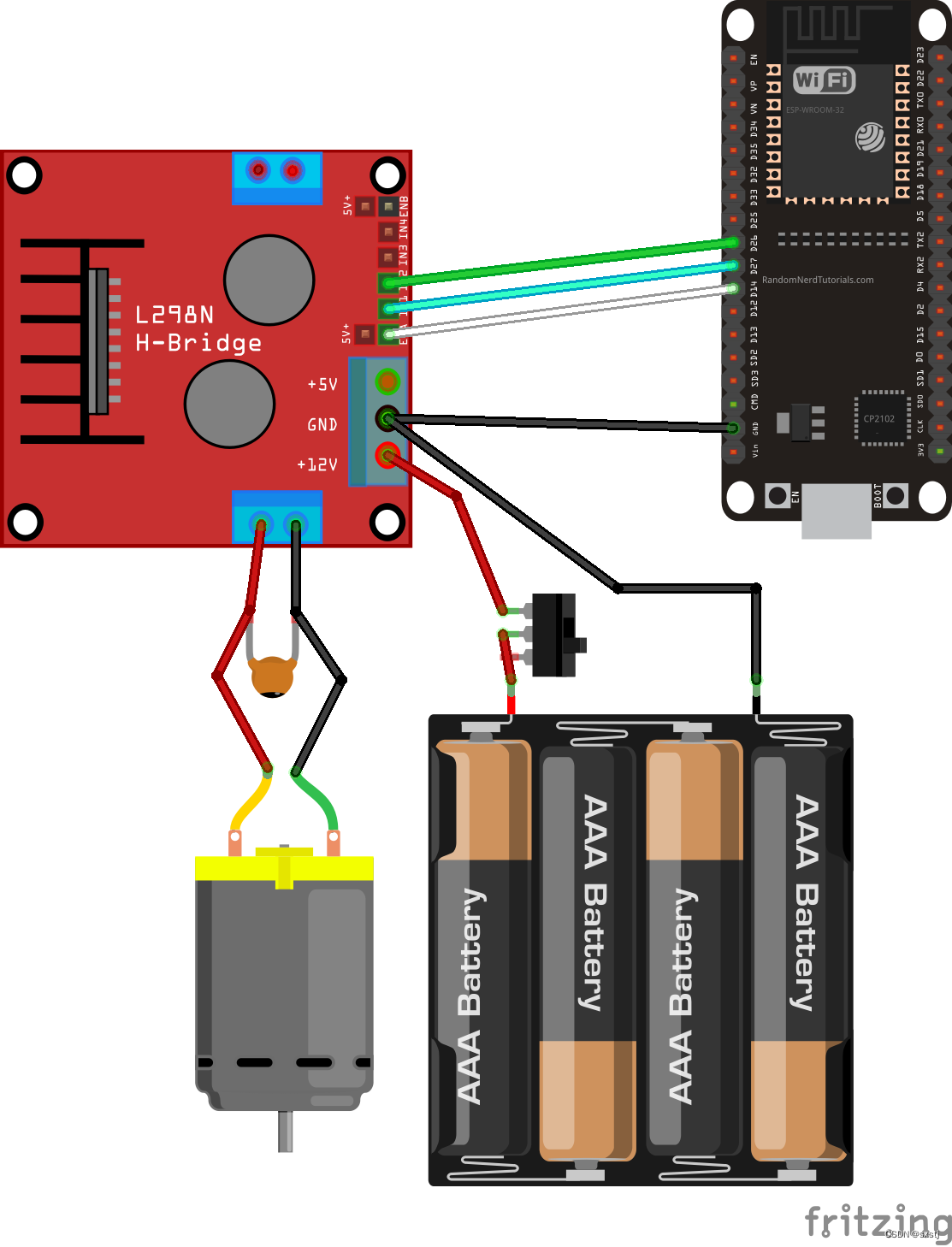
本文主要是介绍ESP32 控制马达(马达驱动板使用 L298N ),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
以下内容是建立在你已经知道如何控制L298N的基础上的,如何你还不知道如何使用L298请先了解后再看,更容易理解代码,虽然代码下方有代码的解释但是还是建议你做好准备工作。
代码:
以下代码控制直流电机的速度和方向。该代码在现实世界中没有用,这只是一个简单的示例,以更好地理解如何使用 ESP32 控制直流电机的速度和方向。
// Motor A
int motor1Pin1 = 27;
int motor1Pin2 = 26;
int enable1Pin = 14;
// 设置PWM 各项属性
const int freq = 30000; //频率30khz
const int pwmChannel = 0;//使用0通道
const int resolution = 8;//分辨率8位也就是0-255
int dutyCycle = 200;//空占比200
void setup() {
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
// 配置PWM功能
ledcSetup(pwmChannel, freq, resolution);
// 关联PWM与管脚
ledcAttachPin(enable1Pin, pwmChannel);
Serial.begin(115200);
// testing
Serial.print("Testing DC Motor...");
}
void loop() {
// 全速向前
Serial.println("Moving Forward");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
delay(2000);
// 停止
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
// 全速后退
Serial.println("Moving Backwards");
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
delay(2000);
// 停止
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
// 逐步增速向前
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
while (dutyCycle <= 255){
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Forward with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle + 5;
delay(500);
}
dutyCycle = 200;
}
将代码上传到您的 ESP32。确保您选择了正确的板和 COM 端口。让我们看一下代码是如何工作的。
代码说明:
声明电机引脚
首先,定义电机引脚所连接的 GPIO。在本例中,电机 A 的input 1 连接到 GPIO 27,input 2 连接到 GPIO 26,EN连接到 GPIO 14。
int motor1Pin1 = 27;
int motor1Pin2 = 26;
int enable1Pin = 14;
设置 PWM 属性来控制速度
正如我们之前所看到的,您可以通过向 L298N 电机驱动器的使能引脚应用 PWM 信号来控制直流电机速度。速度将与占空比成正比。要在 ESP32 上使用 PWM,您需要先设置 PWM 信号属性。
const int freq = 30000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 200;
在本例中,我们在通道 0 上生成 8 位分辨率的 30000 Hz 信号。我们从 200 的占空比开始(您可以设置 0 到 255 之间的占空比值)。
对于我们使用的频率,当您应用小于 200 的占空比时,电机不会移动,并且会发出奇怪的嗡嗡声。因此,这就是我们一开始将占空比设置为 200 的原因。
注意:我们在这里定义的 PWM 属性只是一个示例。电机在其他频率下工作正常。
在里面SETUP(),您首先将电机引脚设置为输出。
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
您需要使用之前定义的属性来配置 PWM 信号ledcsetup()接受作为参数的函数,pwmChannel, 这频率,以及解决, 如下:
ledcSetup(pwmChannel, freq, resolution);
接下来,您需要选择从中获取信号的 GPIO。为此,请使用 ledcAttachPin()函数接受您想要获取信号的 GPIO 以及生成信号的通道作为参数。在此示例中,我们将在启用1PinGPIO,对应GPIO 14。产生信号的通道是pwm通道,对应于通道 0。
ledcAttachPin(enable1Pin, pwmChannel);
推动直流电机向前发展
在里面loop()是电机移动的地方。代码很好地注释了代码每个部分的作用。要向前移动电机,请将输入 1 引脚设置为低电平,将输入 2 引脚设置为高电平。在此示例中,电机向前加速 2 秒(2000 毫秒)。
// 全速向前
Serial.println("Moving Forward");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
delay(2000);
向后移动直流电机
要向后移动直流电机,请以相反的方式向电机输入引脚供电。输入 1 为高电平,输入 2 为低电平。
// 全速后退
Serial.println("Moving Backwards");
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
delay(2000);
停止直流电机
要使直流电机停止,您可以将启用引脚设置为低电平,或将输入 1 和输入 2 引脚设置为低电平。在此示例中,我们将两个输入引脚设置为低电平。
// Stop the DC motor
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
控制直流电机速度
为了控制直流电机的速度,我们需要改变 PWM 信号的占空比。为此,您使用ledcWrite()函数接受生成信号的 PWM 通道(不是输出 GPIO)和占空比作为参数,如下所示。
ledcWrite(pwmChannel, dutyCycle);
在我们的示例中,我们有一个 while 循环,它在每个循环中将占空比增加 5。
// Move DC motor forward with increasing speed
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
while (dutyCycle <= 255){
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Forward with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle + 5;
delay(500);
}
当 while 条件不再成立时,我们再次将占空比设置为 200。
dutyCycle = 200;
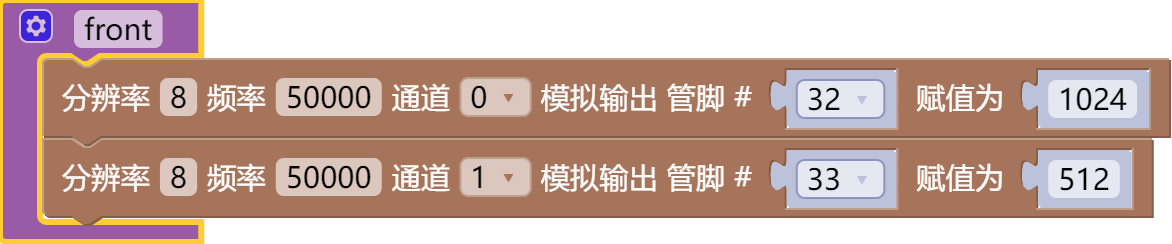
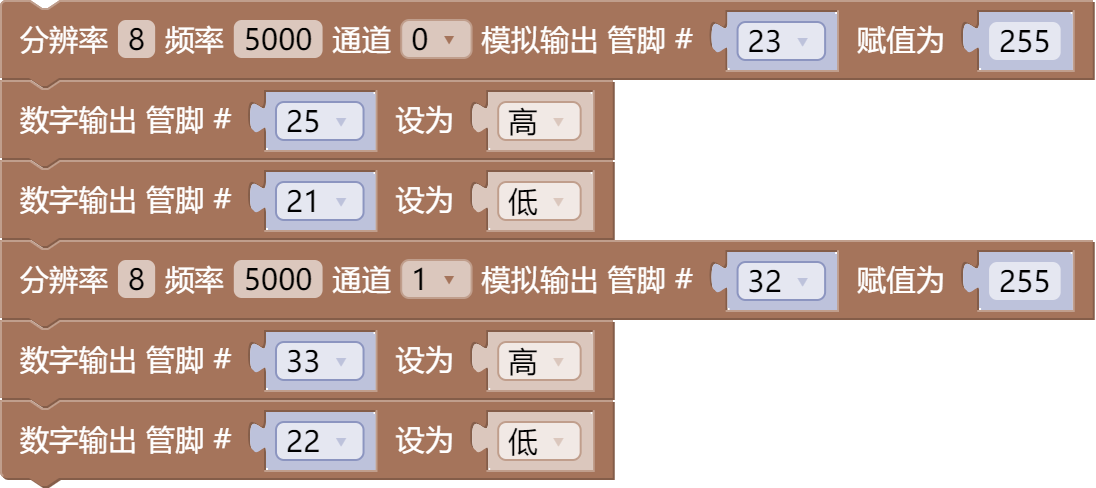
在mixly中使用不同的马达驱动板:
使用drv8833驱动马达半速前进(需要占用4个pwm通道,控制速度和方向):
使用L298N驱动马达前进(需要占用两个pwm通道用来控制速度):
这篇关于ESP32 控制马达(马达驱动板使用 L298N )的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






