马达专题

VS2022+Qt雕刻机单片机马达串口上位机控制系统
程序示例精选 VS2022+Qt雕刻机单片机马达串口上位机控制系统 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言 这篇博客针对《VS2022+Qt雕刻机单片机马达串口上位机控制系统》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。 运行结果 文章目录 一、所需工具软件 二、使用步骤 1. 主要代码

马达对应的actuator结构体分析
1.文件: mm-camera2/media-controller/modules/sensors/actuator/actuator.h中对actuator_data_t进行了如下定义: 这个结构体是actuator马达控制的最外层的数据结构。 typedef struct { int32_t fd; actuator_ctrl_t *ctrl; int16_t c

东莞酷得 SA2020低压马达驱动 集成电路
SA2020芯片是一款专门为马达驱动设计的集成电路。 典型应用 : 2-6节干电池应用的马达驱动 、 2-6节镍氢/镍镉应用的马达驱动 、1-2节锂电池应用的马达驱动 特性 ⚫ 工作电压范围 2.5-9.0V ⚫ 双通道同时工作电流: CH1:2.0A, CH2:2.0A ⚫ CH1/CH2峰值电流:3.8A/3.8A ⚫ 低导通电阻: 240mΩ (HS+LS) ⚫ 低待机电流 (

104-1389-006马达单价1041389006可议价
104-1389-006 产品 M 马达 系列 02 2000 系列 排量 149 244.3 CM3/R [14.91 IN3/R] 安装类型 AH 标准,4 螺栓;先导直径为 82.6 [3.25] 13.59 直径为 [0.535] 直径为 106.4 [4.19] 的孔螺栓圆周 输出轴 16 直径为 32.00 [1.260] 直

查尔-林恩104-1389-006马达电机1041389006
104-1389-006 产品 M 马达 系列 02 2000 系列 排量 149 244.3 CM3/R [14.91 IN3/R] 安装类型 AH 标准,4 螺栓;先导直径为 82.6 [3.25] 13.59 直径为 [0.535] 直径为 106.4 [4.19] 的孔螺栓圆周 输出轴 16 直径为 32.00 [1.260]

51单片机学习笔记17 4线双极性马达和SG90舵机
51单片机学习笔记17 4线双极性马达和SG90舵机 一、四线双极性电机控制1. 四线双极性电机工作方式介绍(1)工作原理(2)驱动方式(3)极性区分(4)驱动方式 2. TC1508S芯片介绍(1)主要特性(2)引脚(3)输入/输出逻辑表 3. 模块电路图4. 代码实现dc_motor_4_wire_utils.cmain.c 二、SG90舵机控制1. SG90简介2. 硬件连接3. 控
摄像头马达驱动的业内知识
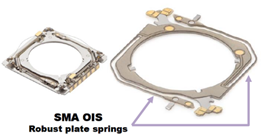
随着科技的进步,现在手机中的摄像头内部都会有带动镜头实现快速并稳定对焦的马达。这些马达,根据是否具有防抖效果,分为只具有自动对焦功能的AF(Auto Focus)马达,和同时兼具防抖效果的OIS(Optical Image Stabilization)马达。 其中AF马达的运动原理如下图,马达只带动镜头在光轴方向运动,实现对拍摄物的准确对焦。 AF马达运动原理 AF马达拍摄效

直流有刷马达控制方法
直流有刷电机(DC brushed motor)是一种常见的电机类型,其控制方法相对简单而直接。下面介绍几种常见的直流有刷电机控制方法: 电压控制方法: 这是最基本的控制方法,通过控制电机的输入电压大小来控制转速。增大电压可以增加转速,减小电压则减小转速。这种方法简单,但转速调节范围有限。 PWM调制: 利用脉宽调制(PWM)信号来控制电机的平均电压值。通过改变PWM波形的占空比来调节电机的
D6208——单片双向马达驱动电路芯片,噪声低 工作电源电压范围宽,内设保护二极管,吸收冲击电流
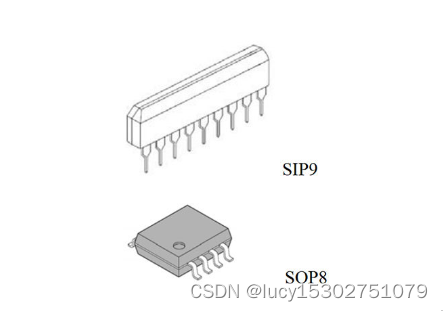
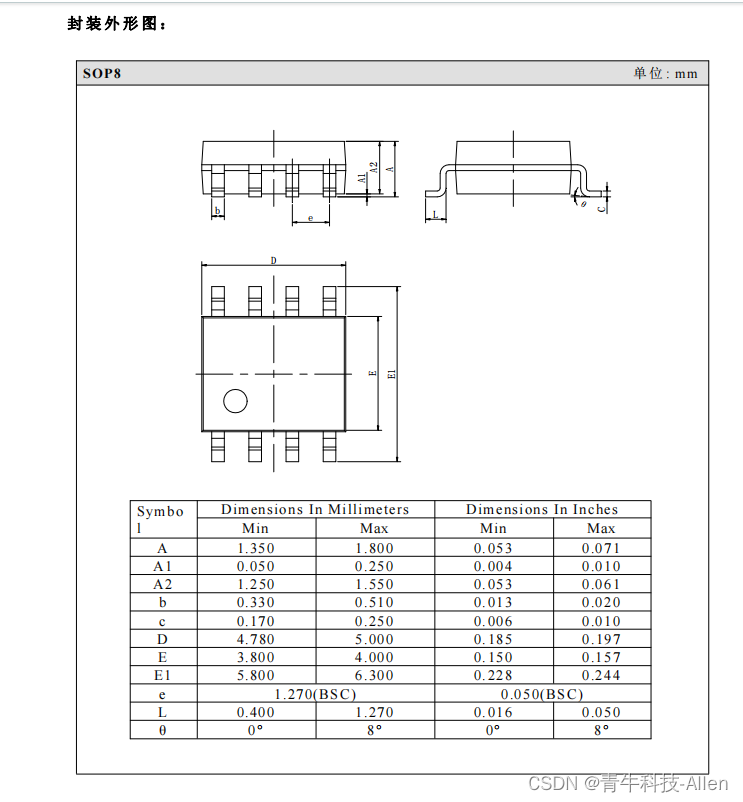
D6208 是一块单片双向马达驱动电路,它使用TTL电平的逻辑信号就能控制卡式录音机和其它电子设备中的双向马达。该电路由一个逻辑部分和一个功率输出部分组成。逻辑部分控制马达正、反转向及制动,功率输出部分根据逻辑控制能提供100mA(典型值)电流。 D6208采用SIP9和SOP8封装形式封装 主要特点: ● 噪声低 内设马达驱动功率晶体管(典型100mA) ● 可施加
矽塔马达驱动芯片在有刷电机中的应用解析
随着科技的不断进步,电机作为动力转换的核心装置,在工业自动化和日常生活中扮演着举足轻重的角色。其中,有刷电机凭借其结构简单、成本低廉、维护方便等优点,广泛应用于各种领域。然而,为了提高有刷电机的性能和效率,矽塔马达驱动芯片为提升电机控制精度和响应速度的关键组件。 一、矽塔马达驱动芯片概述 矽塔马达驱动芯片是一种集成电路,专门设计用于控制和驱动电机。它集成了多种功能模块,如功率驱动

智能电动机保护器ARD3M-1 低压配电、马达保护(安科瑞-须静燕)
ARD3M 智能电动机保护器(以下简称保护器)适用于额定电压至 660V 的低压电动机回路,集保护、测量、控制、通讯、运维于一体。其完善的保护功能确保电动机安全运行,强大的逻辑可编程功能可以满足各种控制要求,多种可选配的通讯方式适应现场不同的总线通讯需求,是工业智能化的理想选择。 该产品采用分体式结构,由主体、显示单元、互感器和选配的通讯模块组成,体积小巧、结构紧凑、接线简单,可适应各种柜体的安

D5869S——5通道DVD马达驱动电路,主要用于DVD播放机伺服电机和伺服线圈的驱动
D5869S是一块五通道BTL驱动电路,主要用于DVD播放机伺服电机和伺服线圈的驱动,内部还包含两个独立的精密电压调整器,其可调范围为1.5V~4V另外,还内置一比较器能对马达转动方向进行检测。可支持不同的应用方案。 主要特点: 聚焦和循迹线圈的两通道电压型 BTL驱动器,主轴和滑动电机的两通道申压型 BTL驱动器,还内置一通道进出盒双向直流马达驱动器。动态范围宽: 9.0V

ST的马达驱动库完全开源了,内附下载地址
最近在ST网站上闲逛发现新发布的马达驱动库MC_SDK_5.0.1_Full(当然要注册和提交信息了)。下载安装以后发现在C:\STMicroelectronics\MC_SDK_5.0.1_Full\Middlewares\ST\MotorControl\MCSDK\MCLib\Any\Src这个路径下面看到了之前封成.o或者.lib的源代码文件,也就是说这个新的马达驱动库是完全开源的了。厂家提
GC5958Q—三相无刷直流电机速度控制芯片,应用在静音风扇马达上,可替代APX9358/茂达
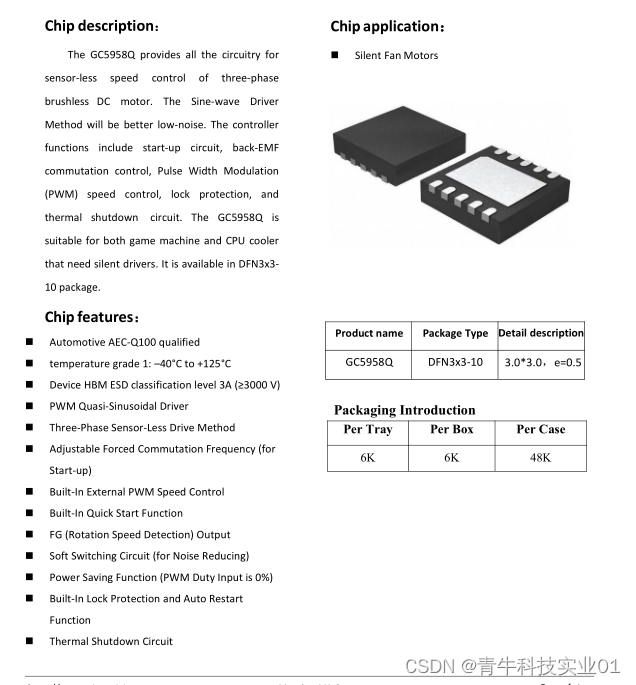
GC5958Q提供无传感器三相无刷直流电机速度控制的所有电路。正弦波驱动器的方法将是更好的低噪声。该控制器的功能包括启动电路,反电动势换向控制,脉冲宽度调制(PWM)速度控制,锁定保护,和热关断电路。该GC5958Q是适用于游戏机和CPU散热器,需要无声的驱动程序。它可在DFN3x3-10封装。 芯片的特点: 汽车AEC-Q100认证 温度等级1:-40摄氏至+125摄氏度 设备HBM
ESP32 控制马达(马达驱动板使用 L298N )
以下内容是建立在你已经知道如何控制L298N的基础上的,如何你还不知道如何使用L298请先了解后再看,更容易理解代码,虽然代码下方有代码的解释但是还是建议你做好准备工作。 代码: 以下代码控制直流电机的速度和方向。该代码在现实世界中没有用,这只是一个简单的示例,以更好地理解如何使用 ESP32 控制直流电机的速度和方向。 // Motor A int motor1Pi
让马达转动起来(motor)
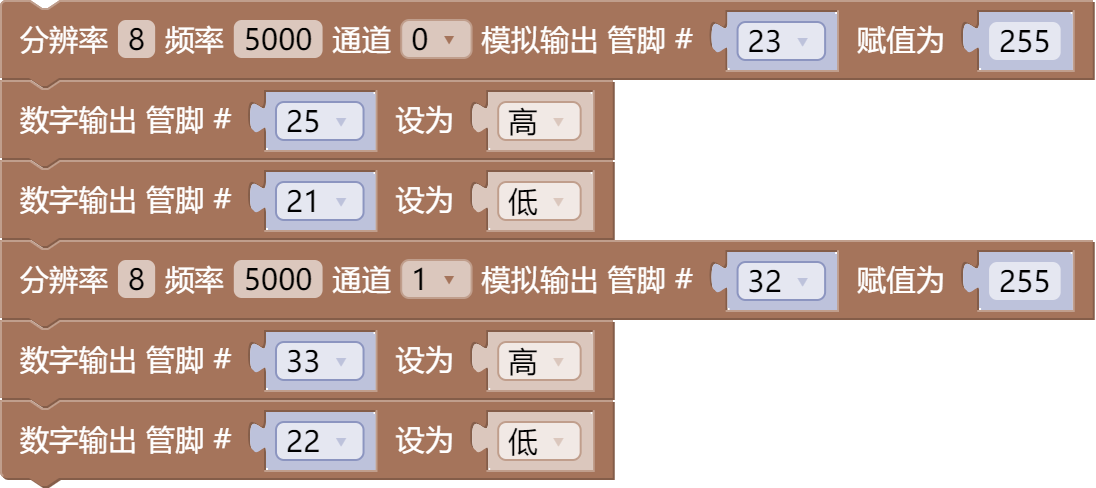
代码: #include "reg51.h"sbit P2_0 = P2^0;sbit P2_7 = P2^7;void main(){while(1){P2_0 = 1;P2_7 = 0;}} 仿真: 介绍: 当2.0和2.7端口均为低电平或高电平时,马达保持不转动; 当2.0和2.7端口分别为高电平和低电平时,马达顺时针转动; 当2.0和2.7端口分别为低电平和高电

Android之 看“马达”如何贯通Android系统 (从硬件设计 -- 驱动 -- HAL -- JNI -- Framework -- Application)
在Android 2.3(Gingerbread) 系统的时候,我写过一篇关于“Android 震动马达系统“的文章,当时的Linux内核还是2.6版本的。写那篇文章的目的,是想彻底的了解从硬件到驱动,再到应用的运作流程。完成了之后,文章一直仍在草稿箱里面没发表;今天看到,决定整理一下,重新发表。目的是想和大家分享自己对Android系统的一点认识:以马达为代表,来考究“Android是如何一
关于马达保护器 的选型 你知道吗
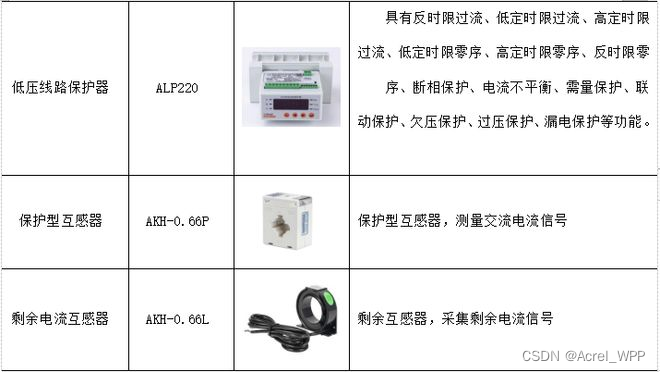
一、智能马达保护器的介绍 在有色冶炼中,根据工艺需求和客户需求,智能电动机保护器的主要应用模式有保护模式、端子控制模式、全通信模式和半通信模式。 4.1保护模式 在保护模式下,智能电动机保护器只利用其自身的保护功能和测量功能,不参与外部控制,相当于原来热继电器的作用。具体接线如图1所示。 图1保护模式接线图 这种模式适用于原有系统的改造升级,外部的控制接线修改很小。优点在于多幅

D6208单片双向马达驱动电路国产芯片,工作电源电压范围宽(4.5V~15.0V),内设保护二极管采用SOP8封装
D6208 是一块单片双向马达驱动电路,它使用TTL电平的逻辑信号就能控制卡式录音机和其它电子设备中的双向马达。该电路由一个逻辑部分和一个功率输出部分组成。逻辑部分控制马达正、反转向及制动,功率输出部分根据逻辑控制能提供100mA(典型值)电流。 D6208采用SIP9和SOP8封装形式封装 主要特点: ● 噪声低 内设马达驱动功率晶体管(典型100mA)
正反转马达驱动芯片D6287F,内置马达停止时省电电路及热保护电路 。最大驱动电流 达1.0A 。广泛用于VCRs及音频设备等 电机中
D6287F 是 一 块 正 反 转 马 达 驱 动 电 路 ,两 种 逻 辑 输 入 方 式 可 控 制 马 达 的 正 转 、 反 转 、 停 止 、 中 断 等 。 内 置 马 达 停 止 时 省 电 电 路 及 热 保 护 电 路 。 最 大 驱 动 电 流 达 1.0A 。 广 泛 用 于 VCRs及 音 频 设 备 等 电 机 的 驱 动 中 。 D6287F采 用

LeJOS学习(9):一个整合传感器与马达的简单例子
几天没有玩玩具了,今天我们来把前几天看文档的结果来整合一下。 仍是上次的那个小车,已具备两个大马达和一个红外传感器,所以我们可以做一个小车,当遇到障碍物时会转向再继续走。为了说明问题,我们先用NXT-G语言来做一个示例,程序如下图: 图形化的东西就是美观。那么我们用lejos又如何实现同样的功能呢? 方案一:使用多线程 先看代码再解释,如下 public class Si

电机马达基于ESO的永磁同步电机无感FOC
电机马达基于ESO的永磁同步电机无感FOC 1.采用线性扩张状态观测器(LESO)估计电机反电势,利用锁相环从反电势中提取位置和转速信息,从而实现无位置传感器控制; 2.提供算法对应的参考文献和仿真模型。 ID:8845692153982757

Arduino三轮全向小车(一):编码马达
Arduino三轮全向小车(一):编码马达 近期准备做一个三轮全向平台,用来搞各种事情。于是先用Solidworks建了一个模型,运动算例搞了一番,还是不知所以然,干脆直接开始动手,变搞边学习。然而查阅网上各种资料高深莫测,看得我云里雾里,初学很是艰辛。所以就写几篇博客记录一下自己的学习过程。作为菜鸡,第一次发博,还请各位大佬多指正。 马达的选用 如果是要做小车的,选用什么样的马
arm裸机测试led灯亮灭、风扇、马达等
汇编代码: .text .global _start_start: @RCC使能GPIOE RCC_MP_AHB4ENSETR[4]->1LDR R0,=0X50000A28LDR R1,[R0]ORR R1,R1,#(0X3<<4)ORR R1,R1,#0X10@PBSTR R1,[R0]@设置PE10/8为输出模式 GPIOE_MODER[20:21]->01LDR
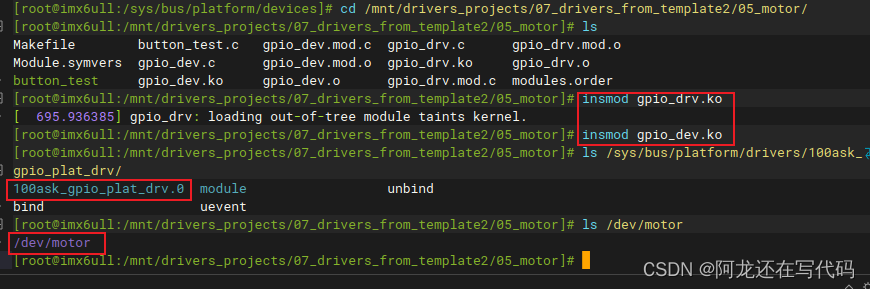
【IMX6ULL驱动开发学习】08.马达驱动实战:驱动编写、手动注册平台设备和设备树添加节点信息
目录 一、使用设备树 1.1 修改设备树流程 二、手动创建平台设备 三、总结(附驱动程序) 前情提要:【IMX6ULL驱动开发学习】07.驱动程序分离的思想之平台总线设备驱动模型和设备树_阿龙还在写代码的博客-CSDN博客 手动注册平台设备和设备树的目的都是为了构造platform_device结构体 一、使用设备树 之前的驱动编写方式,引脚信息在驱动程序里写死了,移植性差。