本文主要是介绍摄像头马达驱动的业内知识,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
随着科技的进步,现在手机中的摄像头内部都会有带动镜头实现快速并稳定对焦的马达。这些马达,根据是否具有防抖效果,分为只具有自动对焦功能的AF(Auto Focus)马达,和同时兼具防抖效果的OIS(Optical Image Stabilization)马达。
其中AF马达的运动原理如下图,马达只带动镜头在光轴方向运动,实现对拍摄物的准确对焦。
AF马达运动原理
AF马达拍摄效果
OIS马达则是除了带动镜头在光轴方向运动实现对焦外,同时让镜头在光轴垂直平面上运动,尽可能大的抵消拍摄时候外部振动(例如手的抖动)对画面清晰度的影响。其运动原理和拍摄效果如下图。
OIS马达运动原理
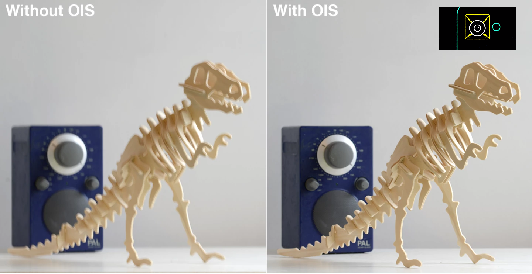
OIS马达拍摄效果
常规的OIS是带动镜头在光轴垂直平面上运动,但是为了实现更大的防抖角度,目前也有带动CIS(CMOS Image Sensor)在光轴垂直平面上运动的方案,如下图。但是从原理上讲是一样的,都是通过镜头和CIS在光轴垂直平面上的相对运动来抵消外部的振动。
CIS原理
更进一步的,为了提升对焦的能力,技术人员又构造出了潜望式OIS马达。顾名思义,之所以称为潜望式,就是因为其光的路径和潜艇的潜望镜相似。通过对三角棱镜的旋转角度进行控制,从而来实现防抖的功能。
潜望OIS摄像头
在了解马达功能的分类之后,接下来则要具体讲述马达是如何实现这些功能。根据马达驱动力的不同,摄像头马达可以分为:线圈马达(VCM),记忆金属马达(SMA)和超声波马达(PZT)。
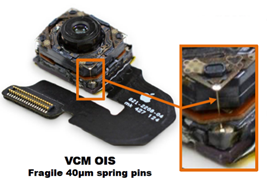
其中,因工艺成熟,VCM成为最常见的一种马达。其原理就是利用通电的线圈和磁石之间的洛伦兹力,带动镜头运动实现需要的AF或OIS功能。如下图是一个悬丝的VCM-OIS马达。其控制原理就是,控制线圈中电流的大小,实现洛伦兹力和弹片变形的反作用力之间的平衡,让镜头稳定在需要的位置。例如,正向电流加大,那么正向的洛伦兹力就会大于初始弹片的反作用力,那么镜头就会向正向运动。但是随着运动距离增加,弹片变形越大反作用力也会越大,直到两个力重新实现平衡,镜头也就稳定在新的位置。OIS方向的悬丝(金属丝的作用和弹片相同)则是构成另外两个方向的弹性结构。
当然,在VCM马达中,除了使用弹片方式外,也有使用滚珠的方案。滚珠式VCM马达,就是利用滚珠的滚动摩擦,让镜头沿着固定轨道运动。因为摩擦力很小,所以不能起到类似弹片结构的弹片变形反作用,因此镜头不能使用某个大小的固定电流让镜头稳定在需要的位置。需要在镜头到达稳定位置后,使用交流的方式让镜头在稳定位置以极小的振幅在这个位置振动。当然,这个振幅很小很小,不会对图像的清晰度产生影响。
悬丝VCM-OIS马达
记忆金属马达(SMA),则是利用记忆金属特有的变形能力拉动镜头运动。这种金属,在特定的电流方式驱动下,金属本体会收缩延伸,带动镜头所在的动子在特定方向运动,实现对焦和防抖功能。
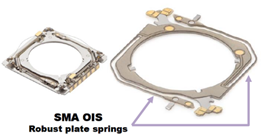
SMA部件结构示意图
超声波马达,也因其使用的是压电陶瓷,又称为压电马达,通常习惯写作英文缩写PZT。PZT其实是一种常用的压电陶瓷材料缩写,但不是所有的压电陶瓷材料都可以使用PZT这个缩写。这种马达因为使用的交流电压在20KHz以上,所以被称为超声波马达。常见的超声波马达为:在特定频率交流电压下,控制两个交流电压的相位差,使压电陶瓷片达到预设的谐振状态,并通过结构件将这种谐振运动转化为设计的运动状态(例如直线运动),带动镜头实现对焦或防抖功能。当然,除了相位差的控制方式外,还有通过改变频率的方式去控制镜头运动的方案。目前,在手机摄像头领域,只有超声波马达还没有真正实现量产。
在了解这些结构相关的信息后,剩下的就是如何控制马达实现这些功能。在控制上,分为open-loop(开环)和close-loop(闭环)两个大类。
开环控制就是,只根据主机的信息,输入控制信号,因为没有反馈信息,所以总是存在误差。例如,让一个人走10米的距离,却不给他测量工具,那么最终他只能停在10米附近,不能保证精确度。
闭环控制,会接收反馈信息,然后实现自我调整,达到更高的精度。同上一个例子,这个人要是有测距的工具,那么他就可以停止在相对准确的10米位置。这里主要是看测距工具的精度。目前摄像头马达中的闭环控制,主要通过磁感的方式去检测镜头的位置。这里的磁感元器件主要是hall(或者带hall功能的驱动芯片),GMR和TMR。ChipSemi基合半导体根据自身的技术积累,提出了电容式检测方案。就闭环控制,最终都需要一个能够提供镜头位置的信号,才能让整个系统信号行程闭环,实现更高的控制精度,从而提升对焦速度和防抖功能。
所以,对于一个好的摄像头方案,除了马达之外,另一个重要的元器件就是控制马达运动的马达驱动芯片。一个好的驱动芯片,除了具有基本的电流、电压输出能力外,更需要一个好的解决方案,外加一个好的团队开发一个好的算法,使马达能够更快更稳地实现对焦和防抖。
众所周知,目前手机摄像头愈来愈多,功能也越来越丰富,但是归根结底,都是上述技术方案的演变和结合。就整个市场而言,每年10多亿部手机上,总共就会有将近30-40亿个摄像头,这是一个极其庞大且更新速度很快的市场。并且随着摄像体验感的需求上升,潜望、OIS等高端摄像头比例也正在逐步攀升。因此,在高端市场的竞争也会进一步加大。另外,除了手机领域,在无人机、安防、各类视频记录仪等邻域,也越发的开始重视拍摄效果。也正因此,摄像头马达和驱动得到更多的重视。
*文中所用部分图片来自网络,如侵权,请联系删除
这篇关于摄像头马达驱动的业内知识的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








