本文主要是介绍stm32驱动直流电机实现启动/加速/减速/倒车/停车等功能,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
不积跬步,无以至千里;不积小流,无以成江海。
大家好,我是闲鹤,公众号 xxh_zone,十多年开发、架构经验,先后在华为、迅雷服役过,也在高校从事教学3年;目前已创业了7年多,主要从事物联网/车联网相关领域和业务。
喜欢交友、骑行、写毛笔字、弹吉他、折腾硬件和写代码。
ps:
如对以下内容有疑问或者咨询,可进行留言 或 添加我的微信公众号留言
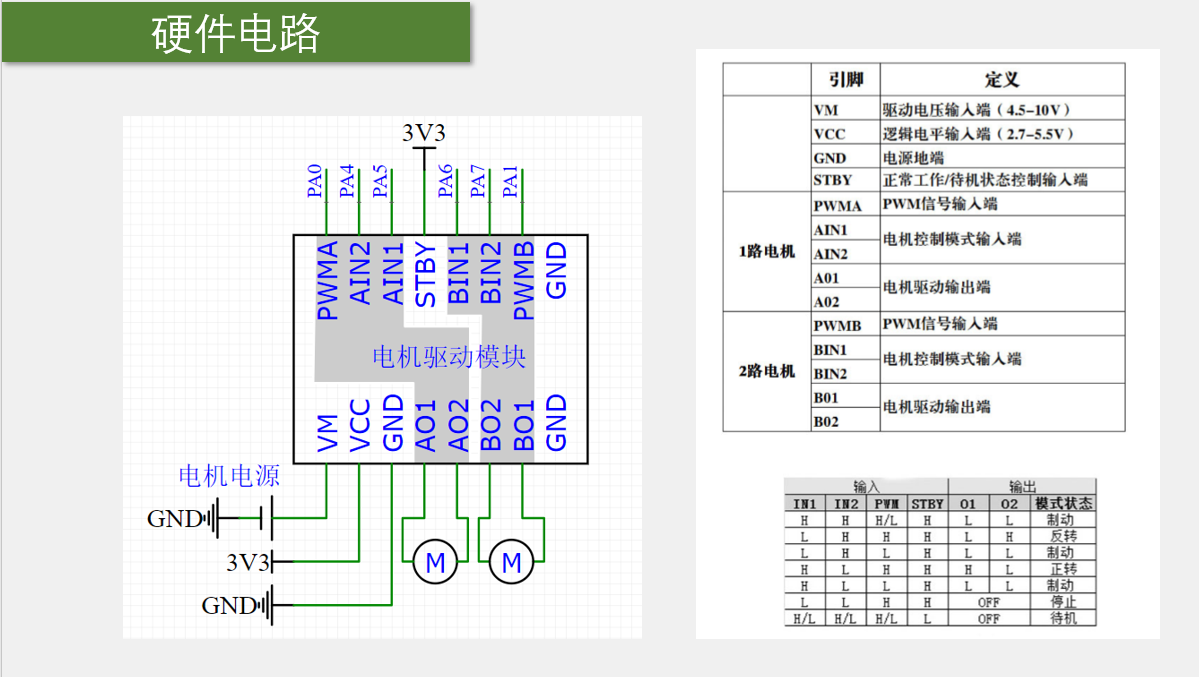
原理
- 使用 PWM 输出脉冲信号
- 直流电机驱动TB6612
通过驱动模块,实现直流电机的启动、停止、加速、减速和倒车
演示视频
https://www.bilibili.com/video/BV1Ai421e7sv/?vd_source=f1d43113e0df5436df9402483a18e193
电路图:
主要实现的功能:
- 启动 MC_Start
- 停止 MC_Stop
- 加速 MC_ACC
- 减速 MC_DEC
- 倒车 MC_Back
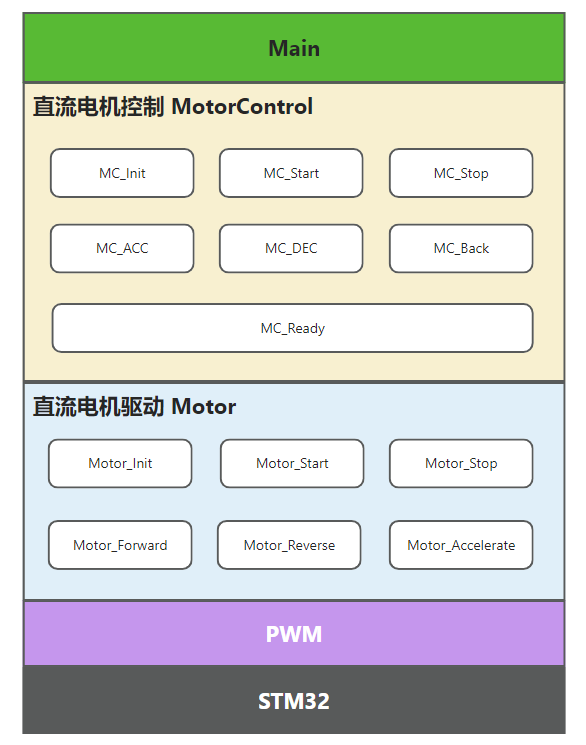
模块封装
代码层封装成了4部分:
- PWM 驱动
这里主要封装了 OC 相关的配置,比如:ARR、PSC等,同时向外提供了修改 CCR 值的函数,以实现 PWM 脉宽的改变(占空比),从而实现电机的旋转速度 - 直流电机驱动
- 对 PWM 的封装
- 驱动 TB6612 模块
- 提供了
Motor_Init、Motor_Start、Motor_Stop、Motor_Forward、Motor_Reverse、Motor_Accelerate函数
- 直流电机控制
- 对 直流电机驱动 封装
- 提供5个按钮功能,分别实现:启动(MC_Start)、停止(MC_Stop)、加速(MC_ACC)、加速(MC_DEC)、倒车(MC_Back) 和 就绪(MC_Ready)
就绪(MC_Ready)又是对前面5个接口的封装,在主函数内部只需要调用这个一个函数即可
- 运行主入口
程序的入口,初始化了直流电机控制,调用了 MC_Ready 函数,并且把相关信息输出到 OLED 屏
整体代码结构图:
源码
PWM.c
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{// 时基RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseStruct.TIM_Period = 100 - 1;TIM_TimeBaseStruct.TIM_Prescaler = 36 - 1;TIM_TimeBaseStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStruct);// OCTIM_OCInitTypeDef TIM_OCInitStruct;TIM_OCStructInit(&TIM_OCInitStruct);TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStruct.TIM_Pulse = 0;TIM_OC1Init(TIM2, &TIM_OCInitStruct);// 输出RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);TIM_Cmd(TIM2, ENABLE);
}void PWM_SetCompare(uint8_t compare)
{TIM_SetCompare1(TIM2, compare);
}Motor.c
#include "Motor.h"
#include "PWM.h"#define IN1 GPIO_Pin_10
#define IN2 GPIO_Pin_11void Motor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Pin = IN1 | IN2;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);PWM_Init();
}/**启动
**/
void Motor_Start(void)
{Motor_Forward();Motor_Accelerate(30);
}/*停止
*/
void Motor_Stop(void)
{GPIO_ResetBits(GPIOA, IN1);GPIO_ResetBits(GPIOA, IN2);
}/**正转 前进
**/
void Motor_Forward(void)
{GPIO_SetBits(GPIOA, IN1);GPIO_ResetBits(GPIOA, IN2);
}/**反转 后退
**/
void Motor_Reverse(void)
{GPIO_SetBits(GPIOA, IN2);GPIO_ResetBits(GPIOA, IN1);
}/**加速
**/
void Motor_Accelerate(uint8_t speed)
{PWM_SetCompare(speed);
}
MotorControl.c
#include "stm32f10x.h" // Device header
#include "MotorControl.h"
#include "Delay.h"
#include "Motor.h"/*提供1. 启动按键 B122. 停止按键 B133. 加速按键 B144. 减速按键 B155. 倒车按键 B11
*/#define MC_KEY_GPIO GPIOB#define MC_START_KEY_PIN GPIO_Pin_11
#define MC_START_KEY_GPIO GPIOB#define MC_STOP_KEY_PIN GPIO_Pin_10
#define MC_STOP_KEY_GPIO GPIOB#define MC_ACC_KEY_PIN GPIO_Pin_0
#define MC_ACC_KEY_GPIO GPIOB#define MC_DEC_KEY_PIN GPIO_Pin_6
#define MC_DEC_KEY_GPIO GPIOA#define MC_BACK_KEY_PIN GPIO_Pin_3
#define MC_BACK_KEY_GPIO GPIOAint8_t speed = 0;
uint8_t is_running = 0;void MC_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // 低电平有效GPIO_InitStruct.GPIO_Pin = MC_START_KEY_PIN | MC_STOP_KEY_PIN | MC_ACC_KEY_PIN | MC_DEC_KEY_PIN | MC_BACK_KEY_PIN;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_Init(GPIOA, &GPIO_InitStruct);Motor_Init();
}/**启动
**/
void MC_Start(void)
{if(GPIO_ReadInputDataBit(MC_START_KEY_GPIO, MC_START_KEY_PIN) == 0) {Delay_ms(20);while(GPIO_ReadInputDataBit(MC_START_KEY_GPIO, MC_START_KEY_PIN) == 0);Delay_ms(20);speed = 30;is_running = 1;Motor_Forward();Motor_Accelerate(speed);}
}/**停止
**/
void MC_Stop(void)
{if(GPIO_ReadInputDataBit(MC_STOP_KEY_GPIO, MC_STOP_KEY_PIN) == 0) {Delay_ms(20);while(GPIO_ReadInputDataBit(MC_STOP_KEY_GPIO, MC_STOP_KEY_PIN) == 0);Delay_ms(20);speed = 0;is_running = 0;Motor_Stop();}
}/**加速
**/
void MC_ACC(void)
{if(is_running == 0) return;if(GPIO_ReadInputDataBit(MC_ACC_KEY_GPIO, MC_ACC_KEY_PIN) == 0) {Delay_ms(20);while(GPIO_ReadInputDataBit(MC_ACC_KEY_GPIO, MC_ACC_KEY_PIN) == 0);Delay_ms(20);speed += 20;if(speed >= 100) speed = 100;Motor_Accelerate(speed);}
}/**减速
**/
void MC_DEC(void)
{if(is_running == 0) return;if(GPIO_ReadInputDataBit(MC_DEC_KEY_GPIO, MC_DEC_KEY_PIN) == 0) {Delay_ms(20);while(GPIO_ReadInputDataBit(MC_DEC_KEY_GPIO, MC_DEC_KEY_PIN) == 0);Delay_ms(20);speed -= 20;if(speed <= 0) speed = 0;Motor_Accelerate(speed);}
}/**倒车
**/
void MC_Back(void)
{if(GPIO_ReadInputDataBit(MC_BACK_KEY_GPIO, MC_BACK_KEY_PIN) == 0) {Delay_ms(20);while(GPIO_ReadInputDataBit(MC_BACK_KEY_GPIO, MC_BACK_KEY_PIN) == 0);Delay_ms(20);is_running = 1;Motor_Reverse();}
}/**准备就绪
**/
void MC_Ready(void)
{MC_Start();MC_Stop();MC_ACC();MC_DEC();MC_Back();
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include <stdio.h>
#include "MotorControl.h"char loginfo[100] = {0};extern uint8_t speed;
extern uint8_t is_running;void Log(uint8_t Line, uint8_t Column)
{OLED_ShowString(Line, Column, loginfo);
}int main()
{OLED_Init();MC_Init();while(1) {MC_Ready();sprintf(loginfo, "Run: %s ", (is_running == 1 ? "Y" : "N"));Log(1, 1);sprintf(loginfo, "Speed: %d ", speed);Log(2, 1);}
}
这篇关于stm32驱动直流电机实现启动/加速/减速/倒车/停车等功能的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







