倒车专题

攻防世界 倒车-x64Elf-100
前言:学习笔记。 下载解压 查壳。 64ida 打开。 跟进跳转。 判断,常规就是,左边 ==1 a1[i]就是flag的值 挺简单的,直接用C语言,照抄就行。 脚本: Code_Talkers
stm32驱动直流电机实现启动/加速/减速/倒车/停车等功能
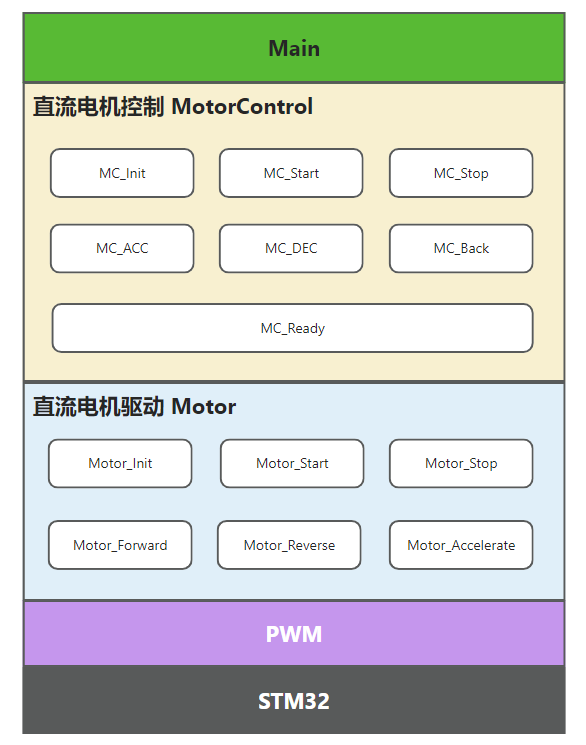
不积跬步,无以至千里;不积小流,无以成江海。 大家好,我是闲鹤,公众号 xxh_zone,十多年开发、架构经验,先后在华为、迅雷服役过,也在高校从事教学3年;目前已创业了7年多,主要从事物联网/车联网相关领域和业务。 喜欢交友、骑行、写毛笔字、弹吉他、折腾硬件和写代码。 ps: 如对以下内容有疑问或者咨询,可进行留言 或 添加我的微信公众号留言 原理 使用 PWM 输出脉冲信号直流电机
基于单片机的超声波倒车雷达设计
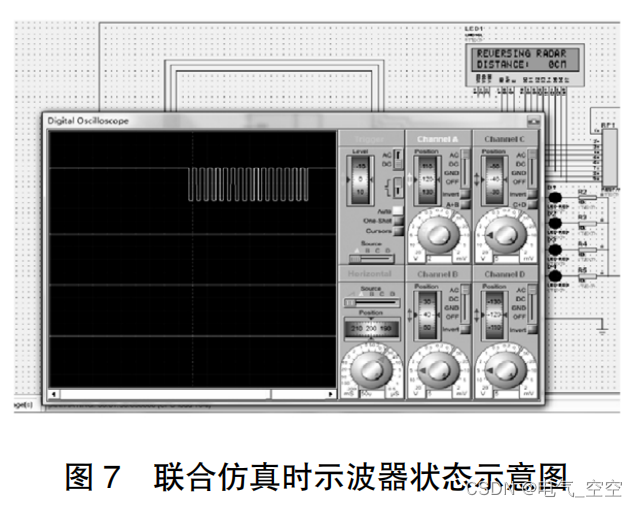
摘 要:文 章设计了一种基于单片机的超声波倒车雷达系统,以 AT89C51 型单片机作为控制核心,集距离测量、显示,方位显示和危险报警于一体,以提高驾驶者在倒车泊车时的安全性和舒适性。本设计采用 Keil 软件对系统程序进行调试,并采用 Proteus 对整个系统进行了仿真,仿真结果达到了预期的效果。 关键词:超声波;测距;单片机;倒车雷达 前言 近年来,随着驾

STM32 | 超声波写倒车雷达小系统
01、知识回顾 STM32 | HC-SR04 超声波测距模块 | DHT11数字温湿度传感器(第七天)STM32 | 数字温湿度传感器DHT11STM32 | HC-SR04 超声波测距模块STM32 | DHT11数字温湿度传感器实战STM32 | 超声波实战STM32 | 方式1:手机发送指令,开发板向手机发送温湿度;方式2:手机发送指令,开发板定时向手机发送温湿度。 02、作业2
科目二倒车入库学车技巧_学车必看_保过。
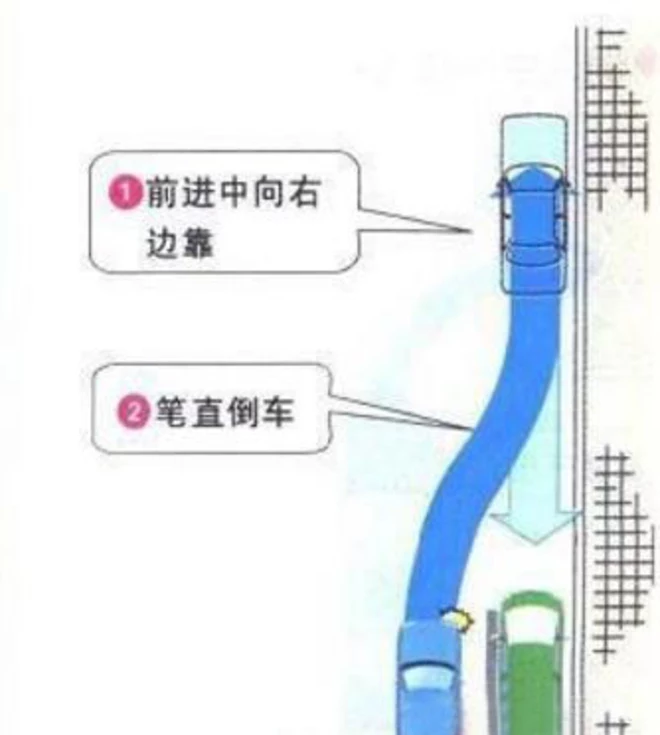
科目二倒车入库技巧 科目二倒车入库是场内项目的最难点,通过本人的学车过程,觉得只要你认真练习,认真总结,感觉倒车入库其实也并不难。下面把本人的练习方法和各位学友交流。 点位的掌握 所谓点位就是你在倒车入库的过程中把某个点作为你的视觉参照物而进行特定动作的点。不管是右倒库还是左倒库,最重要的点位是两个,即倒库时你向右(左)打死方向盘的点,入库快完成时,踩刹车的停车点。现在我

科目二难点——倒车入库
倒车入库在科目二考试五个项目中不合格的人数比例最大的一项,被称为科二最难的项目。 倒车入库到底难在哪里呢? 1、它的操作步骤是最多的项目。倒车入库要求的操作步骤多,相对应的需要记忆和操作的动作要领就多,容易出现问题的地方就多,失败的可能性就大。 2、正确倒进库的时机不好把握,进库以后车身不正不容易作调整,操作过程中还不允许停车,要想做好这些都需要有熟练的技术技

基于Arduino UNO模拟倒车雷达功能
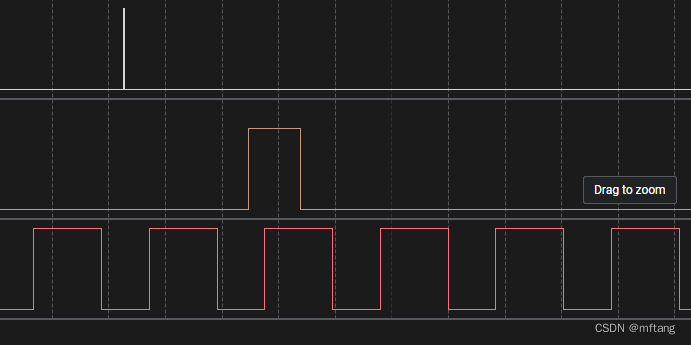
目录 概述 1 硬件架构 1.1 整体硬件结构 1.1.1 主要模块介绍 1.1.2 硬件连接图 1.2 认识HC-SR04 1.2.1 HC-SR04特性 1.2.2 HC-SR04操作时序 1.2.3 计算距离 1.3 蜂鸣器模块 2 软件设计 2.1 功能分析 2.2 代码实现 3 测试 4 验证 4.1 超声波测距波形验证 4.2 报警信号波形
自动驾驶代客泊车360环式系统及倒车雷达功能规范
1. 文档总概. 8 1.1. 范围. 8 1.2. 名词解释. 8 1.3. 相关应用文档. 8 1.3.1. 文档优先说明. 8 1.3.2. 政府法规与文件. 9 1.3.3. 行业规范与文件. 9 1.3.4. 百度及客户提供相关功能定义文档. 9 2. 系统概述. 10 2.1.
stm32项目(13)——基于stm32的倒车雷达装置
1.功能设计 使用stm32f103zet6,(某原子精英板)。利用一个超声波模块:HCSR04,测距(使用了简单滤波算法:测十次数据,去掉最大值、去掉最小值,求平均值),将距离信息实时显示在LCD屏幕上。设定一个距离阈值,当所测距离小于阈值时,蜂鸣器报警,LED灯亮,同时屏幕上显示一副“注意危险”的图片。距离大于阈值的时候,蜂鸣器不响,LED灯不亮,屏幕不显示图片。 (需要代
勿语-----教你三招倒车入位的旷世绝学
12、从前发生事故总想暴打对方一顿;现在被人追了尾都想私了算了,吃点亏总比每天跑大队和保险公司来的实惠。 案例5:如果您刚买了一辆新车,上了全险,但没有来得及领牌照(现在的交管规定:验车后的15个工作日后方可领牌证),出险后保险公司负责赔偿吗? 不负责赔偿。因为在出险时,保险车辆必须具备两个条件,一是保险车辆须有公安交通管理部门核发的行驶证或号牌,二是在规按期间内经公安交通治理部
基于Linux系统(迅为iTOP-4412)设计的倒车雷达系统
基于嵌入式Linux系统设计的倒车雷达预警系统。 支持激光测距功能,支持设置报警范围距离,蜂鸣器根据距离不同进行调整声音的频率,LCD显示屏实时显示倒车影像画面。 主控开发板采用ITOP-4412精英版,运行的Linux系统版本为3.0。 屏幕采用4.3寸LCD屏,分辨率为480*272, LCD的设备节点是/dev/fb0,是标准的帧缓冲框架进行开发。 摄像头采用UVC免驱摄像头,通过标准V4

利用opencv做车载倒车伪全景拼接图
例如图片中左边的图像,在交车倒车时,车四周摄像头全景拼接 思路:其实所谓全景拼接不过是一个是伪拼接,并不是对图像重合区域进行特征点识别和对其,而是对图片进行压缩剪辑,融合放到背景图上。 1、取一张汽车图片,将图片分为九宫格,如下所示,九宫格中间正好是汽车图片,九宫格的上下左右设置为梯形,用于盛放车身四周图片 2、通过几何关系找到图中1、2、3、4点的坐标,用于标记图像中mask尺寸,

单片机设计_智能可视化倒车系统(STM32、OV7670摄像头、HC-SR04超声波传感器)
智能可视化倒车系统 想要更多项目私wo!!! 一、系统总体框图 当小车前进时,LCD上可显示小车前进的提示信息等;当小车后退时,开始利用图像传感器实现对小车后侧的图像实时监测,利用距离传感器实现对小车后侧障碍物的距离实时监测,并将测量数据传送至STM32进行处理,然后由控制器根据所检测的各种数据实现在LCD模块上显示出来。根据要求设计要求,可得到系统总体框图如下: 二、总体电路设计 根

YFX软件库合集-开车很简单,超实用倒车行车技巧送上,也能从容上路
很多新手视开车上路为难事。其实,只要找准诀窍,开车很简单!今天,就来为各位车主送上超实用的倒车+行车技巧。学会了这些,新手也能从容上路。 一、倒车技巧 1、多观察后视镜。车辆后视镜能够显示出车辆后方的情况,对于未配备倒车影像的车辆而言,后视镜就是要点配置。在倒车途中,车主可以通过多多观察后视镜而知晓车辆与车位、车辆与马路牙子等间距,从而及时调整方向盘。 2、驾乘人员下车指导。若车主不

倒车雷达C语言程序,【荐】闲来无事,研究单片机,自己做了个语音报距倒车雷达,效果不错...
这本人作构成,总成本约150元啊 这构成图 这效果视频 下面控制单片机核心C语言代码 /***********************************************************************************************************/ //HC-SR04 超声波测距模块 DEMO 程序 //晶振:11。0592

22款奔驰S400L升级原厂360全景影像 倒车更加的安全
您是否经历过这种场面呢? 停车位,狭窄障碍停车困难 避免盲区,倒车盲区危及生命安全 狭窄路段,无法判断是否安全通过 视角盲区,小孩站在视野盲区看不到,Xjh15863 360度无缝3D全车可见,解决各个视角盲区,安装在前,左,右,后面的摄像头用回原车的,这也是升级原厂360的一个好处。 后视,后视广角,侧面,前视和前视广角均可看得一清二楚,每个角落都能清晰可见 硬件安装完,师傅用奔驰

虹科案例 | 2020款捷豹XE车倒车影像无法显示
作者:温州东昌实业有限公司 蔡永福 故障现象 一辆2020款捷豹XE车,搭载2.0T发动机,累计行驶里程约为4.3万km。车主进厂反映,倒车影像无法显示。 故障诊断 起动发动机,将挡位置于倒挡,中央显示屏上的倒车影像不显示(图1),只显示雷达的界面,点击摄像头按键,倒车影像也不显示。 图1 倒车影像不显示 用故障检测仪(TCD)

MTK平台视频倒车显示区域图像裁剪---第一部分
在倒车显示时,设置预览分辨率是1280x720(AHD)或CVBS(720*576-NTSC制,720*480-PAL制)在LCD1024x600分辨率或1280x720分辨率的屏上显示时,会发现有些摄像头上下左右有黑边,这个时候可以通过ATC芯片内部的倒车模块硬件图像的裁剪功能来达到显示正常图像的目的。必须的TVD图像输出到内部ISP搬运数据到LCD的framebuffer之前进行裁剪,否则显示
AC8257 快速倒车动态倒车辅助线调试记录
1、硬件上需要连接CVBS 摄像头或MIPI 摄像头,MCU 与 ARM2的GPIO 连接 2、制作倒车辅助线图片,需要多张图片,修改配置文件 制作ARM2 ,mrf分区文件。 3、在backcar app 初始化时,把mrf中的图片全部读入内存,进行初始化,分配好内存,编好号等待使用。 4、初始化GPIO 串口通信 5、等待MCU 拉高GPIO 进入摄像头画面显示,读取串
车内看车头正不正技巧_半挂车倒车技巧,“一把到位”So easy!
-鸿 懋 陪 你 日 夜 朝 夕--轻 铝 伴 你 走 过 四 季- 对于绝大多数的半挂车新手司机,倒车技术应该是最难攻克的一项技巧了。倒车时半挂车和牵引头行驶的方向是相反的,而且挂车一般很长,很难估计距离和角度。新手司机由于经验缺乏和驾驶手感等问题,倒车成了大难题。今天,小懋总结了一些半挂车的倒车技巧,给需要的新手兄弟们参考一下。 关键词一:找好角度 倒车前要调整好车头和车身,尽

毕业设计 基于51单片机的汽车倒车防撞报警系统 (源码+硬件+论文)
文章目录 0 前言1 主要功能2 硬件设计(原理图)3 核心软件设计4 实现效果5 最后 0 前言 🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。 为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是 🚩 毕业设计
(转)四头倒车雷达最低几百元
http://news.xinhuanet.com/auto/2008-02/11/content_7586760.htm 四头倒车雷达最低几百元 2008年02月11日 08:04:16 来源:新京报 【字号 大 中 小 】 【 留言 】 【 打印 】 【 关闭 】 【Email推荐: 】 刚拿本的老吕从朋友手里淘换了一辆二