本文主要是介绍AC8257 快速倒车动态倒车辅助线调试记录,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、硬件上需要连接CVBS 摄像头或MIPI 摄像头,MCU 与 ARM2的GPIO 连接
2、制作倒车辅助线图片,需要多张图片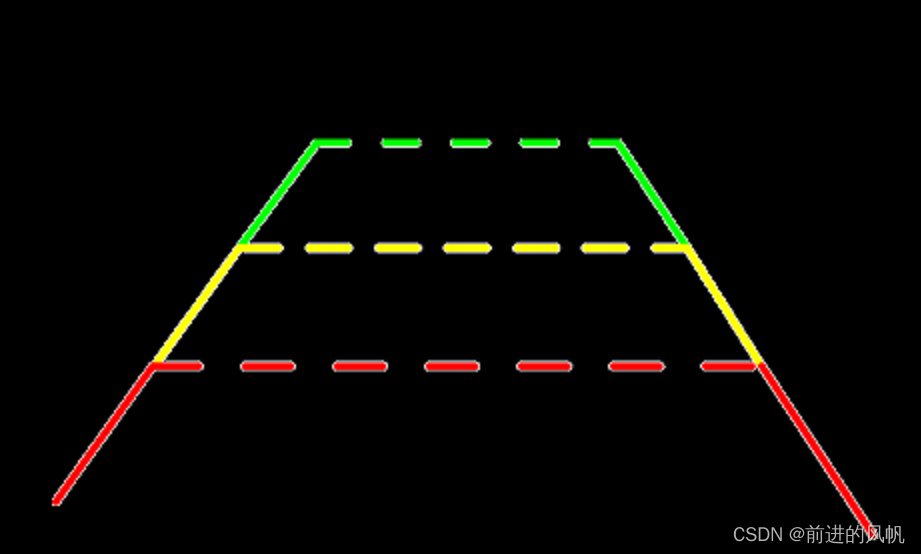 ,修改配置文件
,修改配置文件
制作ARM2 ,mrf分区文件。
3、在backcar app 初始化时,把mrf中的图片全部读入内存,进行初始化,分配好内存,编好号等待使用。
4、初始化GPIO 串口通信
5、等待MCU 拉高GPIO 进入摄像头画面显示,读取串口信息,解析协议,跟据角度及雷达信息显示倒车辅助线和雷达状态。
这篇关于AC8257 快速倒车动态倒车辅助线调试记录的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





