通过图解的方式我们来了解一些不同情况的停车位该如何倒车进去。
一、车位与行驶方向垂直

二、车位与行驶方向平行

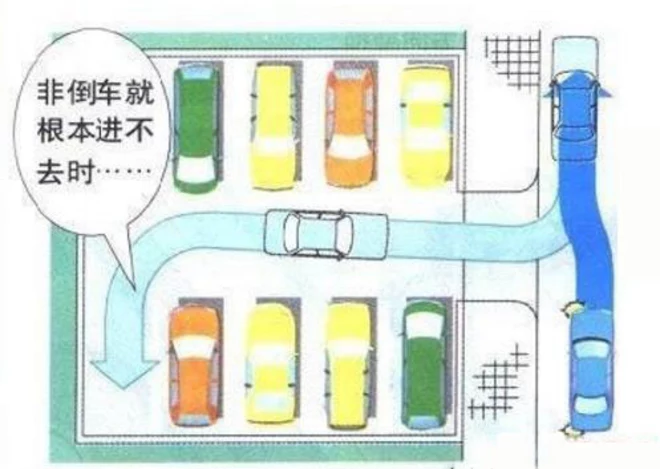
三、在停车场停车
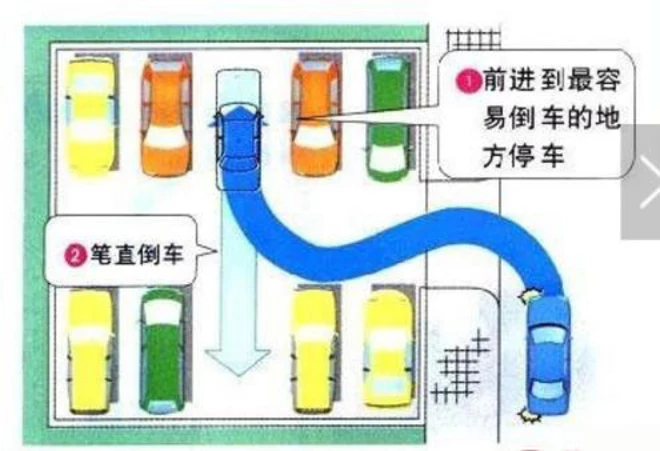
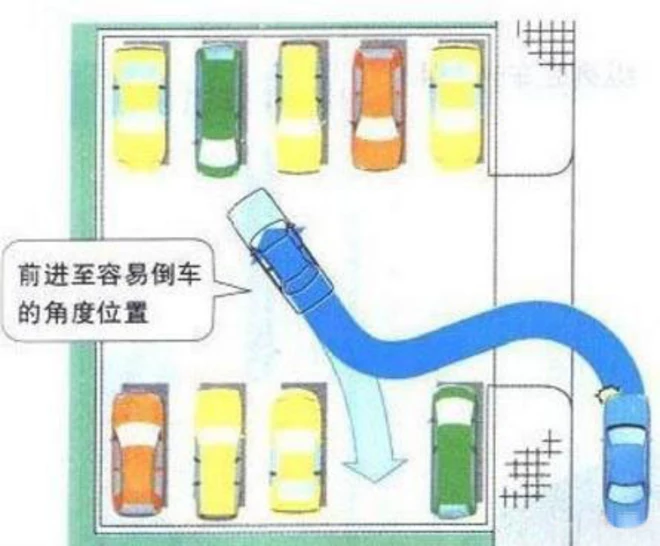
四、车位在最里面时
五、只剩一个车位时
六、斜线式停车位

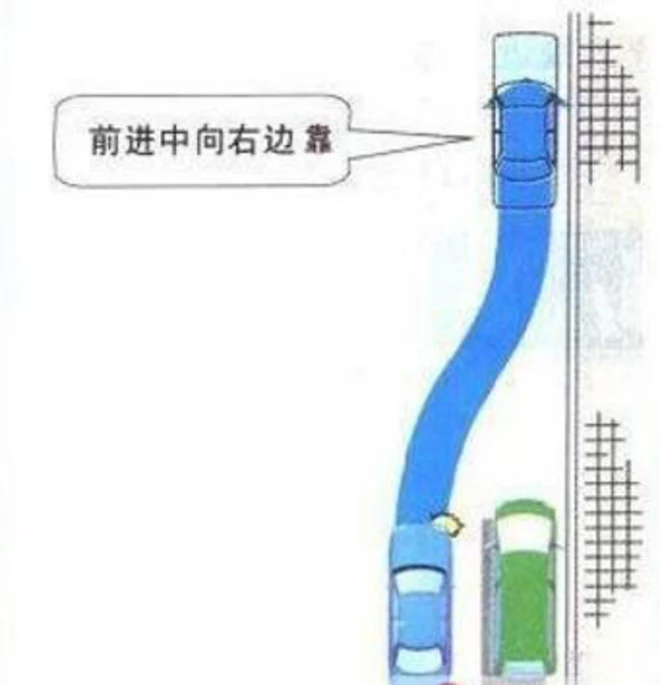
七、纵列停车位

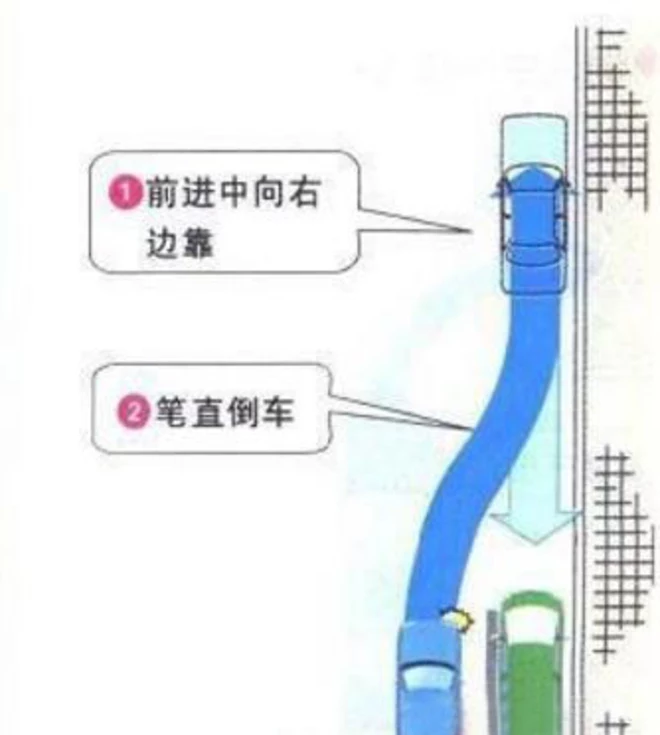
八、能停2辆车的纵列停车位
九、最前面有停车位
本文主要是介绍倒车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
通过图解的方式我们来了解一些不同情况的停车位该如何倒车进去。
一、车位与行驶方向垂直
二、车位与行驶方向平行
三、在停车场停车
四、车位在最里面时
五、只剩一个车位时
六、斜线式停车位
七、纵列停车位
八、能停2辆车的纵列停车位
九、最前面有停车位
转载于:https://www.cnblogs.com/focusahaha/p/9196705.html
这篇关于倒车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/217677。
23002807@qq.com