本文主要是介绍基于Arduino UNO模拟倒车雷达功能,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
概述
1 硬件架构
1.1 整体硬件结构
1.1.1 主要模块介绍
1.1.2 硬件连接图
1.2 认识HC-SR04
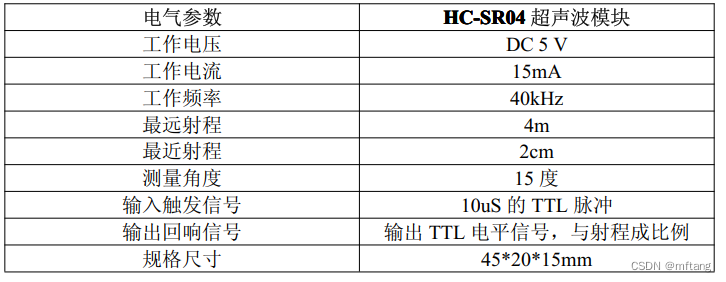
1.2.1 HC-SR04特性
1.2.2 HC-SR04操作时序
1.2.3 计算距离
1.3 蜂鸣器模块
2 软件设计
2.1 功能分析
2.2 代码实现
3 测试
4 验证
4.1 超声波测距波形验证
4.2 报警信号波形
概述
本文主要介绍应用Arduino UNO主控板,模拟一个倒车雷达系统,使用HC-SR04实现测距功能,还详细介绍了HC-SR04的测距原理,以及实际距离的计算方法。其实现功能如下:当离障碍物的距离有一定的风险时,蜂鸣器会开始报警。风险距离越近,报警声频率越高。
1 硬件架构
1.1 整体硬件结构
1.1.1 主要模块介绍
Arduino UNO: 主控板,用于控制HC-SR04模块,以获取距离数据
蜂鸣器模块: 根据不同的距离,触发不同的报警声音
HC-SR04: 超声波测距模块,用于获取和障碍物之间的距离
1.1.2 硬件连接图
整体连接结构图如下:
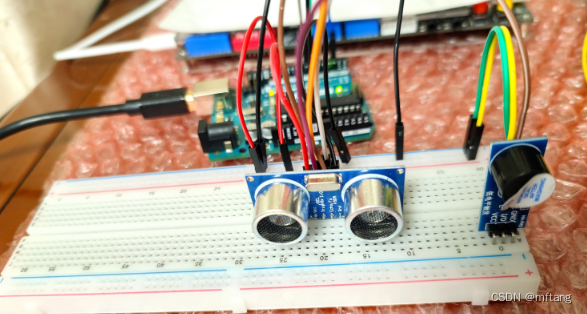
模块引脚与Arduino UNO主板之间关系:
| 模块引脚 | Arduino UNO 引脚 | 注释 |
| SR-04 TRIG | PIN-7 | 测距触发信号 |
| SR-04 ECHO | PIN-6 | 测距信息 |
| Beep - IO | PIN-3 | 低电平触发 |
1.2 认识HC-SR04

1.2.1 HC-SR04特性
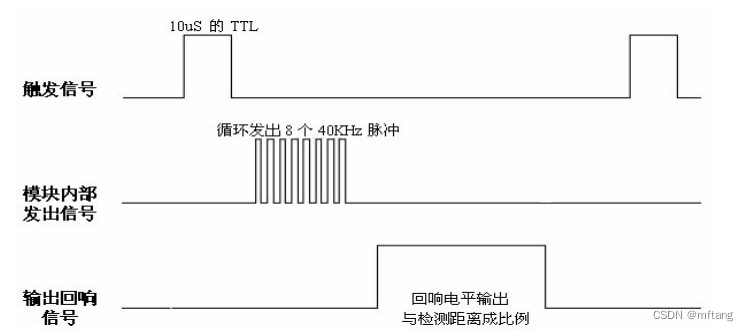
1.2.2 HC-SR04操作时序
工作原理:
Step -1: TRIG IO 收到10us 高电平
step - 2: SR04自动发送8个40hz方波,并检测是否有信号返回
step - 3:SR04检测到返回信号,ECHO IO发送高电平,高电平持续时间为SR04发送波信号到返回波信号的时间。
具体工作波形图如下:
1.2.3 计算距离
以厘米为单位计算公式:
距离 = us/58(单位: cm), us为ECHO IO接收的高电平的持续时间,时间单位为: 微妙
以英寸为单位计算公式:
距离 = us/148(单位: 英寸), us为ECHO IO接收的高电平的持续时间,时间单位为: 微妙
1.3 蜂鸣器模块
该模块主要用来发出报警声音,其工作参数如下:
工作电压: 3~5V
触发电平: 低电平会发出声音

2 软件设计
2.1 功能分析
倒车雷达功能描述:
1)当障碍物和车之间的距离为安全距离时,不发出报警信息
2)当障碍物和车之间的距离为有一定的风险时,发出间歇式报警
3)当障碍物和车之间的距离为风险距离时,发出急促式报警
2.2 代码实现
软件主要实现功能如下:
1)控制超声波测距模块,得到实际数据
2)逻辑计算报警距离
3)控制beep的触发信号

详细代码如下:
/*
Copyright 2024-2029. All rights reserved.
文件名 : SR_04_PRO
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : 使用超声波测距模块和蜂鸣器模拟倒车雷达功能
其他 : 无
日志 : 初版V1.0 2024/2/15
*/
const int Trig = 7; // 设定SR04连接的Arduino引脚
const int Echo = 6;
const int Beep = 3; double distance,time ;
void setup()
{ Serial.begin(115200); // 初始化串口通信及连接SR04的引脚pinMode(Trig, OUTPUT); pinMode(Echo, INPUT); //要检测引脚上输入的脉冲宽度,需要先设置为输入状态Serial.println("The distance is :");pinMode(Beep, OUTPUT); analogWrite(Beep, 50);
}
void loop()
{ digitalWrite(Trig, LOW); delayMicroseconds(2); digitalWrite(Trig, HIGH); delayMicroseconds(10); //产生一个10us的高脉冲去触发SR04digitalWrite(Trig, LOW); time = pulseIn(Echo, HIGH); // 检测脉冲宽度,注意返回值是微秒usdistance = time /58 ; //计算出距离,输出的距离的单位是厘米cmSerial.print(distance); //打印得到的距离值Serial.println("cm"); if( distance > 120 ){analogWrite(Beep, 0); }else if( distance > 20 && distance < 120){analogWrite(Beep, 50); }else{analogWrite(Beep, 150); }delay(1000);
}3 测试
测距的数据信息

4 验证
4.1 超声波测距波形验证
下图可得响应信号时间为: 1.56 ms, 用改时间计算出距离为: distance = 1560/58 = 26.58 cm
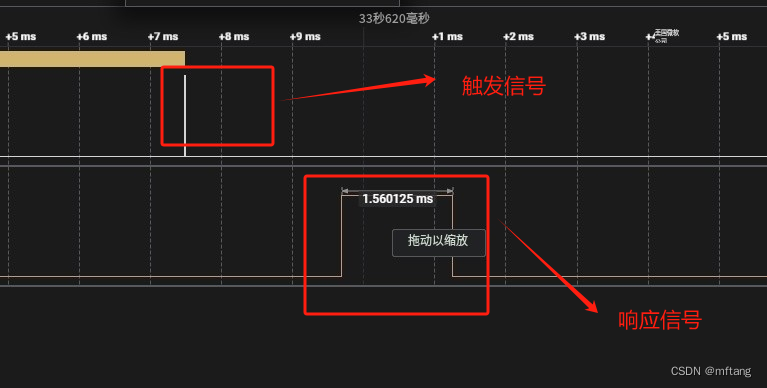
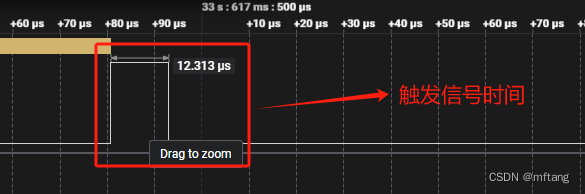
放大后的触发信号时间: 12.3 us
4.2 报警信号波形
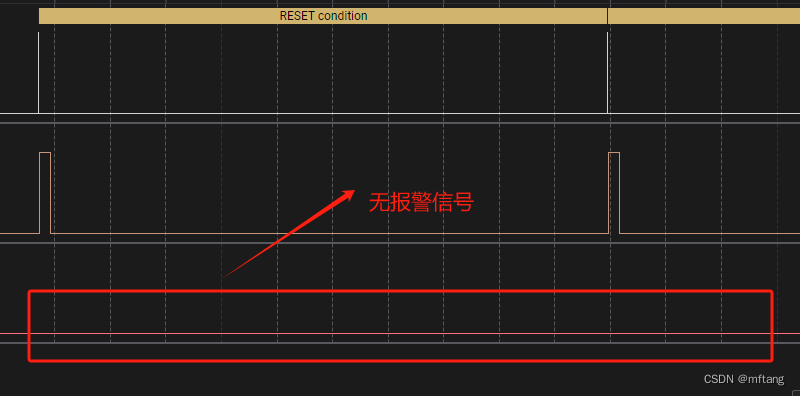
1)远离报警距离时,报警信号波形
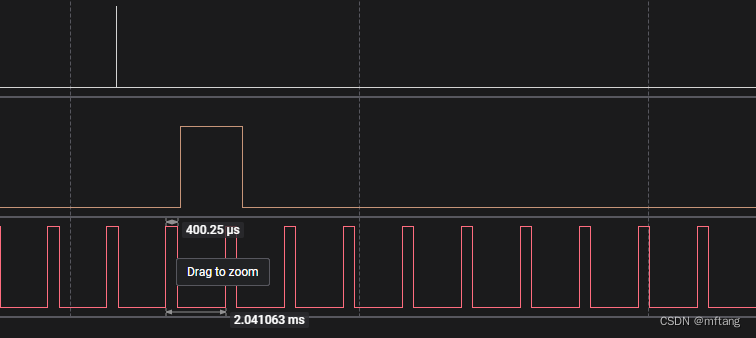
2)接近报警距离,还在一定的安全区
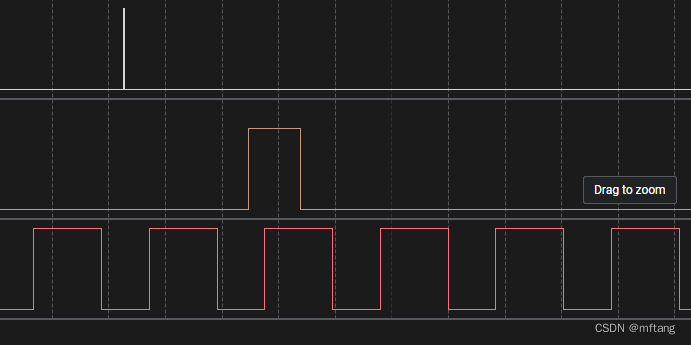
3)极度风险区
这篇关于基于Arduino UNO模拟倒车雷达功能的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






