光度专题
Halcon 光度立体 缺陷检测
一、概述 halcon——缺陷检测常用方法总结(光度立体) - 唯有自己强大 - 博客园 (cnblogs.com) 上周去了康耐视的新品发布会,我真的感觉压力山大,因为VM可以实现现在项目中的80% 的功能,感觉自己的不久就要失业了。同时康耐视开始布局工业的每个方面,生成一个完整的生态链,国内很喜欢搞某某一条龙服务。相机方面出了很多尤其是3D的,还有2.5D的相机,精度方面不
光度立体法的简化求解(已知特殊光源方向)
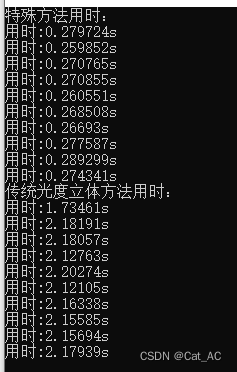
原理这个博主写的很好 如何获取物体表面的法向量?好好谈谈光度立体法-CSDN博客 Photometric Stereo 光度立体三维重建(一)——介绍-CSDN博客 不过当图片较大的时候,比如4048*4000这种量级的,矩阵很大,速度要10秒,加了openmp也需要2s; 如果我们知道一些先验知识,在特定的slant和titls角度,可以简化过程,提升速度(结果在最后) 四个光
宇宙学共动距离、光度距离以及物质功率谱的求解(astropy)
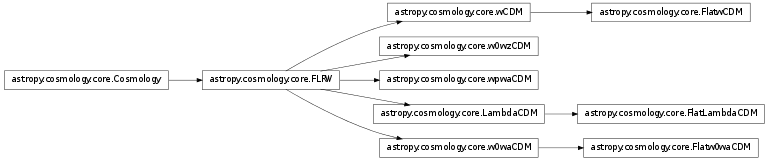
对于宇宙学和天文学的小伙伴来说,会经常遇到求解各种距离和物质功率谱等参数,如果自己写程序,要写不少行,至少我原来是这样的。那么如何更有效的得到这些参数呢?astropy发现很好用。 具体网站 该笔记与我的另外一个笔记类似,功能相同,但是库不同,可以参考一下: 宇宙学colossus库介绍 这里不做过多叙述,可以参考一下截图:

Photometric Stereo光度立体三维重建(五)——基于深度学习的PS方法
本文将会介绍几种具有代表性的将深度学习与Photometric Stereo进行结合来进行三维重建的方法 一、开山之作 DPSN 论文:Deep Photometric Stereo Network github:https://github.com/hiroaki-santo/deep-photometric-stereo-network 参数化的郎伯反射模型建立在理想的漫反射假设下,而且
Photometric Stereo 光度立体三维重建(四)——光源标定
光源标定是进行光度立体三维重建的第一步,本文将介绍两种光源标定方法——基于金属球反射的标定以及基于“SFM”思想的标定 1.基于金属球反射的标定 标定光源的一种方法是使用金属球,在排到的金属球的照片上面的最亮的点指明了光源的方向 来源于http://pages.cs.wisc.edu/~csverma/CS766_09/Stereo/stereo.html的示意图: 然而,这幅示意图的几何
Photometric Stereo 光度立体三维重建(三)——由法向量恢复深度
本文分为三部分,第一部分是使用最小二乘法求解物体表面法向量,第二部分是利用求解得到的法向量求出物体表面的深度(物体表面的高度场),第三部分是将求出的高度场写成obj文件后使用MeshLab显示 1. 最小二乘求解物体表面法向量 Python代码 代码所使用的数据来自https://github.com/yasumat/RobustPhotometricStereo import numpy
Photometric Stereo 光度立体三维重建(二)——研究现状
本文首先介绍基于稀疏回归的鲁棒光度立体三维重建,再介绍光度立体三维重建的基准数据集 1.基于稀疏回归的鲁棒光度立体三维重建 在基于光度的三维重建中,若表面不是郎伯的,会出现离群值,比如物体表面的投射阴影,附着阴影以及高光点(镜面反射),如图所示: 1.1 回归方法 我们对郎伯成像模型加上腐蚀(corruption,理解为加上噪声): 再通过传统的最小二乘法求解: 但是,L2回归会受到
Photometric Stereo 光度立体三维重建(一)——介绍
在计算机视觉的三维重建中,基于几何的方法有: SFM立体视觉 结构光 我们在这篇文章中介绍的是基于光度立体视觉的三维重建方法: 基于几何的三维重建方法中可以恢复粗略的三维形状,而光度法的特点是可以对物体进行精细恢复 0. 预备知识 0.1 物体表面法向量 一个表面的法向量(法线)n垂直于其切平面: 0.2 郎伯反射 特点: 1.反射光的量与 l T n ( = c o s θ

Python_Tkinter和OpenCV模拟行星凌日传输光度测定
传输光度测定 在天文学中,当相对较小的天体直接经过较大天体的圆盘和观察者之间时,就会发生凌日。 当小物体移过较大物体的表面时,较大物体会稍微变暗。 最著名的凌日是水星和金星对太阳的凌日。 借助当今的技术,天文学家可以在凌日事件期间探测到遥远恒星光线的微妙变暗。这项技术称为凌日光度测定法,可输出恒星亮度随时间变化的图。 在上图中,光曲线图上的蓝点代表恒星发出的光的测量值。 当行星没有位于恒星上

终极光度蒙版PS插件Raya Pro 5 for Mac
Raya Pro 5 Mac版是Mac平台上的一款专为ps用户打造的最终数字混合工作流程扩展面板插件,raya pro mac为您提供了亮度蒙版、锐化工具、噪音消除、频率分离、自动对齐图层、自动色彩校正等功能,可以大大地提高设计师的处理效率,加速工作流程。 自动曝光混合,适合初学者 48种不同的16位亮度蒙版 16位精密口罩 简易过滤器 即时数字混合方法1:快速混合 即时数字融合方
一张图看懂亮度、明度、光度、光亮度、明亮度
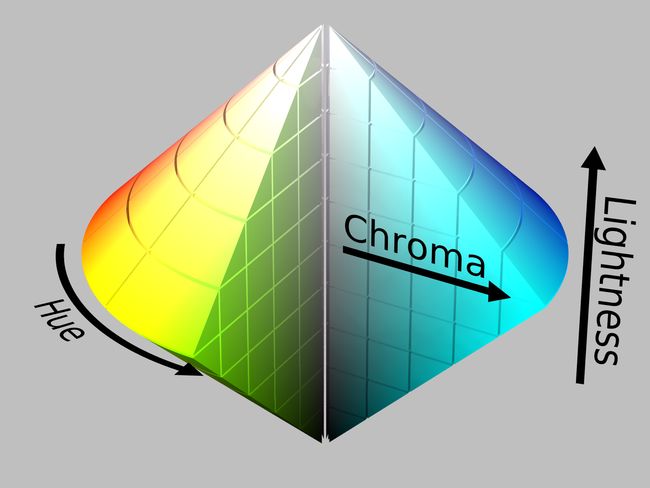
2019独角兽企业重金招聘Python工程师标准>>> 亮度、明度、光亮度,Luminance和Brightness、lightness其实都是一个意思,只是起名字太难了。 提出一个颜色模型后,由于明度的取值与别人的不同,为了表示区别所以就另想一个词而已。 因此在表述时,必须表述是哪个颜色模型才能知道区别。但是一般Luminance和亮度表示物理上的亮度。 现在说区别: HSB既是HSV


计算机视觉:朗伯光度立体法(Lambertian Photometric Stereo)
计算机视觉:朗伯光度立体法(Lambertian Photometric Stereo) 光度立体法简介朗伯光度立体法算法原理朗伯光度立体法matlab程序示例Albedo图Normal图Re_rendered图 参考文献 光度立体法简介 光度立体法,即Photometric Stereo, 最早是由当时在MIT的人工智能实验室的Robert J. Woodham教授在1978年
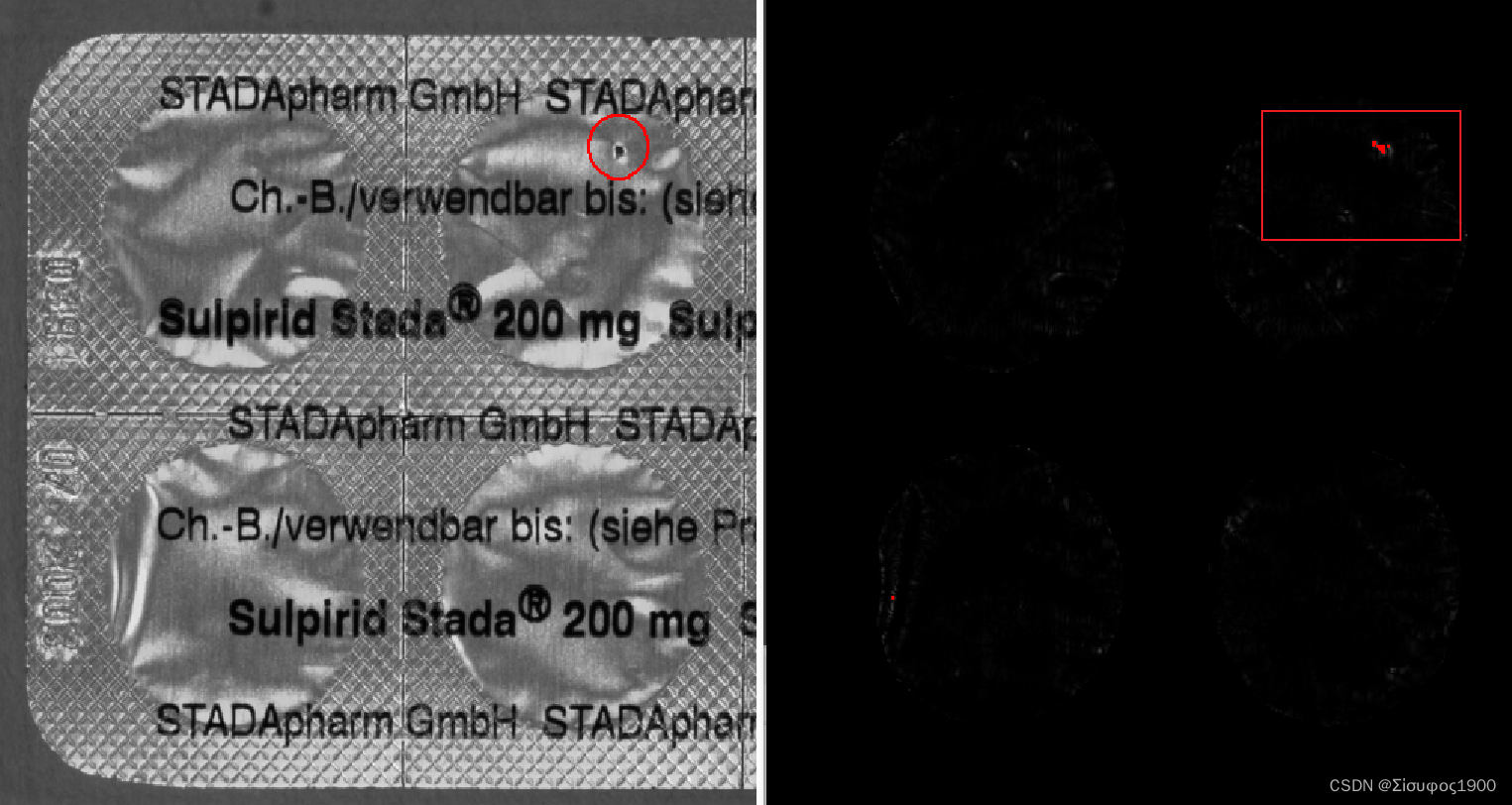
halcon瑕疵检测-光度立体法检测药片包装背面的缺陷
在工业领域,表面检测是一个非常广泛的应用领域。在halcon中,使用增强的光度立体视觉方法,三维表面检测被加强。利用阴影可方便快速的检测物体表面的缺口或凹痕。使用光度立体视觉方法可在复杂图像中轻松找到表面缺陷。药片包装的背面,不平整并且还有很多文字。此示例便是使用光度立体法,检测药片包装背面的缺陷。 示例代码如下: * 该示例通过使用光度立体技术检测药片包装背面的缺陷 * 输入是4